Clear Sky Science · zh
用于可泛化肌电手势识别的少样本原型自适应
教机器读取肌肉信号
想象只需绷紧前臂肌肉就能操控假手、计算机光标或虚拟现实手套。要实现这一承诺,需要可靠地将来自肌肉的微弱电信号翻译为可识别的手势。然而在现实中,这些信号会随日常和个体差异发生变化,迫使用户忍受冗长且疲惫的校准过程。本文提出了 EMG-Adapt,一种新方法,只需少量示例就能快速学习肌肉模式,使更实用、更易用的肌控设备更近一步成为现实。
为何肌电信号难以使用
肌电图(EMG)通过皮肤上的传感器测量肌肉的微弱电活动。这些信号包含我们预期动作的丰富信息,但同时也极不稳定。相同的手势在数据中可能呈现不同样貌,原因包括电极轻微移动、用户疲劳或个体体型差异。实验室中表现良好的系统在数日后或对新用户测试时往往会失效。为每位用户收集足够的带标签数据既缓慢又令人疲惫,尤其是对于截肢者而言,他们从更好的假肢控制中受益最大。
捕捉手势的稳定“心跳”
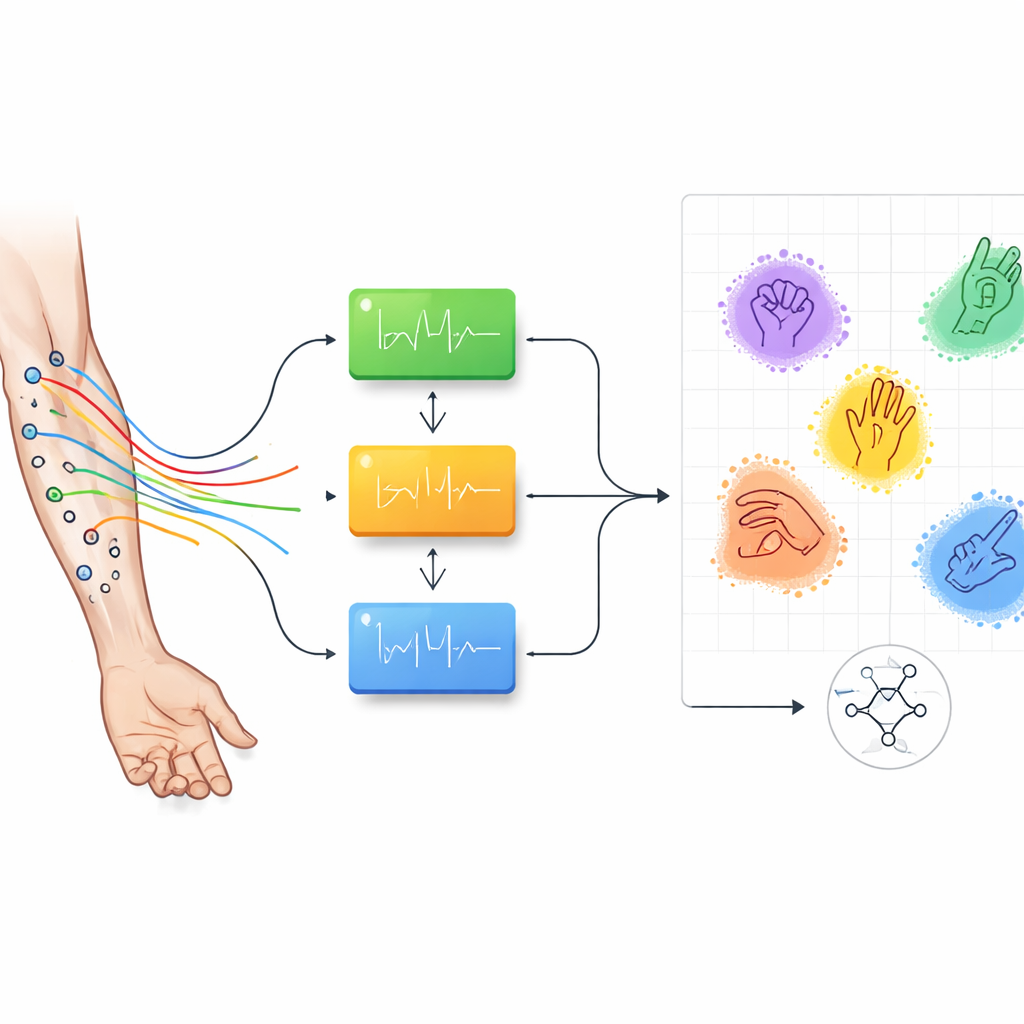
EMG-Adapt 首先通过将原始肌电信号转换为更稳定的表征来应对这种不稳定性。作者没有把成千上万的原始数据点直接送入神经网络,而是将每个传感器的信号概括为一个紧凑数值,捕捉其整体频谱“指纹”。他们通过平均倒谱系数来实现这一点,这是一种描述信号能量如何在频率上分布的方法。通过在时间和传感器通道上求平均,该方法抑制了瞬时噪声,强调了每次执行给定手势时保持一致的信号成分。这种提炼后的描述将杂乱且具有个体差异的轨迹转化为更清晰的签名,从而在不同会话和不同人之间具有更好的泛化能力。
学习手势原型
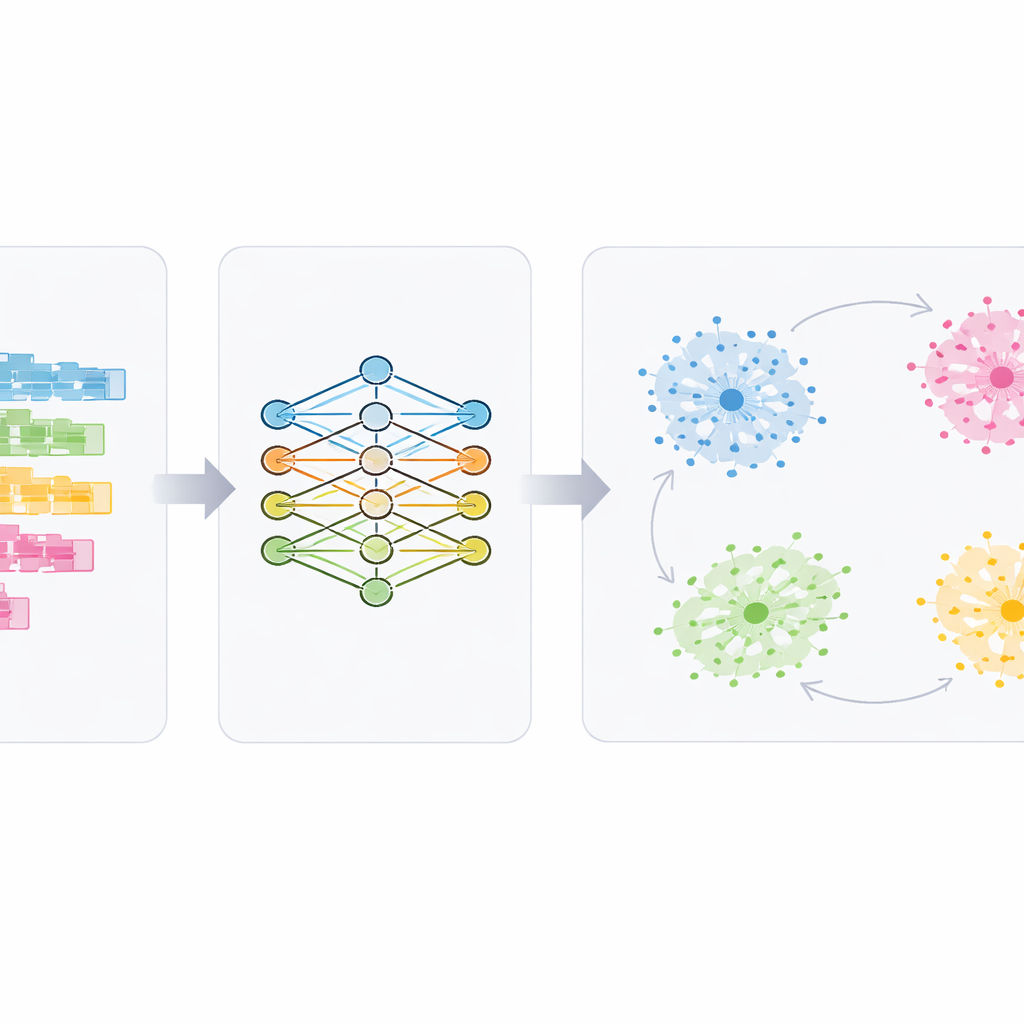
第二个关键思想是让模型学习每个手势的原型——一种典型的指纹。一个轻量级的一维卷积神经网络将紧凑的 EMG 特征转换为抽象空间中的点。在训练过程中,系统基于示例为每个手势计算一个中心点(即原型),并在此过程中将该手势的新示例拉向该中心,同时将不同手势相互分离。该机制通过混合训练目标来实现:一部分专注于正确分类手势,另一部分塑造学习空间的几何结构,使相同手势的样本形成紧密且彼此分离的簇。在测试时,模型只使用高效的分类层,但得益于由原型帮助创建的结构化表征。
仅凭少量示例学习新用户
第三个要素是元学习,这是一种训练策略,使模型通过反复练习许多小规模分类任务,从而擅长从极少样本中学习。EMG-Adapt 使用一种称为 Reptile 的方法,反复模拟只需从每类手势的少量示例中区分几种手势的情形。在每个模拟任务中,随着网络参数的更新,它重新计算手势原型,使原型能够与特征共同进化。经过大量此类任务和多名受试者的训练,模型学会了一个初始化参数,可以在仅见到少量带标签示例后迅速微调以适应新用户或新会话——有时每个手势只需 5、10 或 20 个样本。
在现实条件下验证其有效性
为测试 EMG-Adapt,作者使用了五个大型公开 EMG 数据集(Ninapro 集合),其中包含来自健全个体和截肢者的数十种手和腕部手势。他们评估了两个具有挑战性的情形:跨会话(在同一人但不同天训练和测试)和跨用户(在部分人上训练、在全新的人上测试)。在这两种情形中,EMG-Adapt 在允许的少量自适应样本条件下始终匹配或超越最先进方法。它还更高效:一维网络使用的内存远少于标准图像式网络,训练更快,并能在高端机器和紧凑的基于 ARM 的设备上实时运行。
这对未来假肢与交互界面的意义
对非专业读者而言,核心信息是 EMG-Adapt 让机器更容易理解我们的肌电信号,而不再需要漫长且劳累的训练过程。通过结合一种稳定的 EMG 信号摘要方法、基于原型的手势视角以及围绕快速自适应构建的练习机制,该框架可以迅速个性化到新用户和新条件。这可能减少使用假手、辅助设备或手势控制虚拟环境时的重新校准挫败感,并为未来能够在我们日常生活中后台持续学习的系统奠定基础。
引用: Lee, H., Lim, B., Jiang, M. et al. Few-shot prototype adaptation for generalizable electromyography gesture recognition. Sci Rep 16, 12546 (2026). https://doi.org/10.1038/s41598-026-40352-6
关键词: 肌电图, 手势识别, 假肢控制, 少样本学习, 人机交互