Clear Sky Science · sv
Få-exempel-prototypanpassning för generaliserbar elektromiografi-gestigenkänning
Lära maskiner att läsa muskelsignaler
Föreställ dig att styra en protetisk hand, en datormarkör eller en virtuell-handske bara genom att spänna underarmens muskler. Det löftet förutsätter att man på ett tillförlitligt sätt kan översätta svaga elektriska signaler från muskler till igenkännbara gester. I verkligheten förändras dock dessa signaler från dag till dag och mellan personer, vilket tvingar användare att genomgå långa och tröttande kalibreringssessioner. Denna artikel presenterar EMG-Adapt, en ny metod som snabbt lär sig muskelmönster från bara ett fåtal exempel och därmed för in mer praktiska och användarvänliga muskelstyrda enheter ett steg närmare verklig användning.
Varför muskelsignaler är så svåra att använda
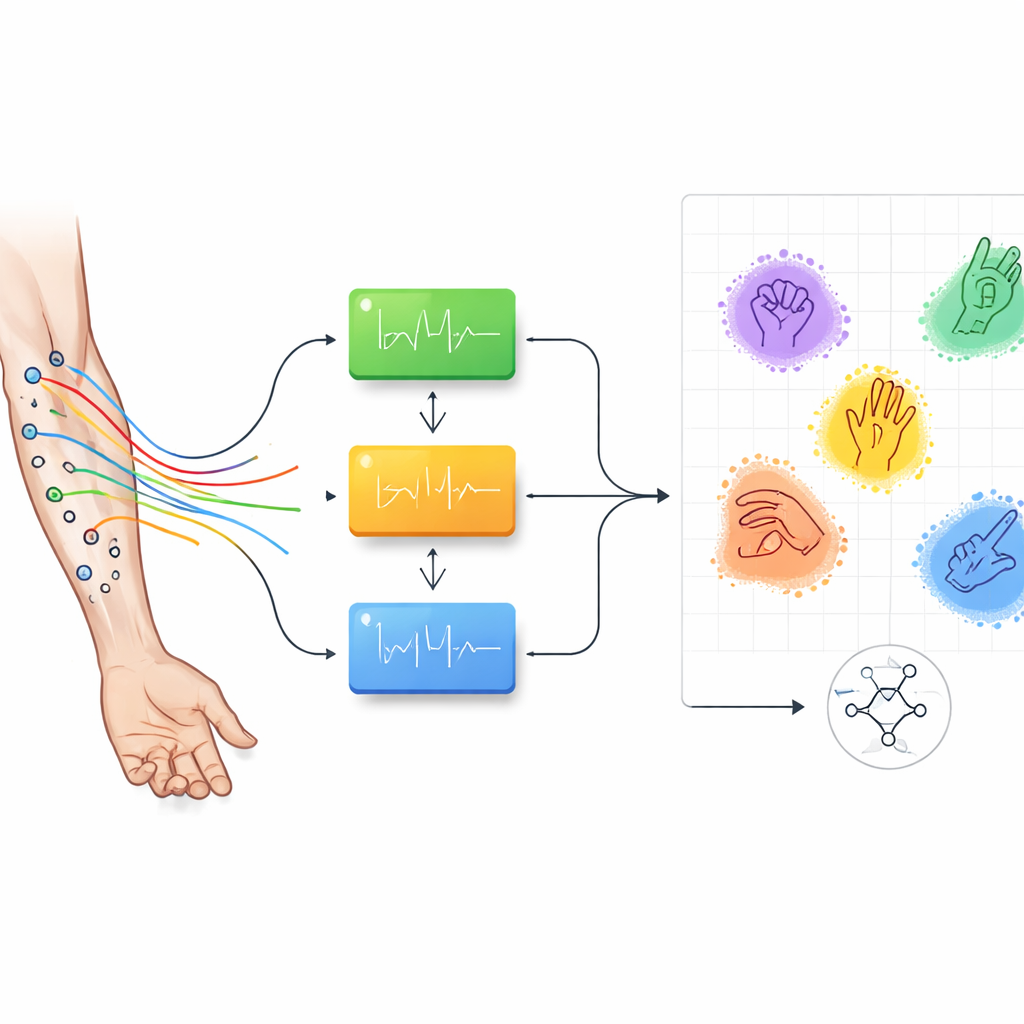
Elektromyografi (EMG) mäter små elektriska aktiviteter i muskler via sensorer på huden. Dessa signaler bär rik information om våra avsedda rörelser, men de är också ökända för att vara instabila. Samma handgest kan se olika ut i datan om elektroderna flyttar sig något, om användaren är trött eller om personen har annan kroppstyp. System som fungerar bra i labbet misslyckas ofta när de testas dagar senare eller på en ny person. Att samla tillräckligt med märkta data från varje användare är långsamt och tröttande, särskilt för personer med amputationer som skulle ha mest nytta av förbättrad protesstyrning.
Fånga en gests stabila "hjärtslag"
EMG-Adapt tar sig an denna instabilitet genom att först omvandla råa muskelsignaler till en mer stabil representation. Istället för att mata det neurala nätverket med tusentals råa datapunkter sammanfattar författarna varje sensors signal till ett kompakt tal som fångar dess övergripande spektrala "fingeravtryck." De gör detta genom att genomsnittligt beräkna cepstrum-koefficienter, ett sätt att beskriva hur signalens energi fördelas över frekvenser. Genom att medelvärdesbilda över tid och sensorkanaler undertrycker metoden flyktigt brus och framhäver de delar av signalen som är konsekventa varje gång en viss gest utförs. Denna destillerade beskrivning förvandlar röriga, användarspecifika spår till renare signaturer som generaliserar bättre över sessioner och personer.
Lära prototyper för gester
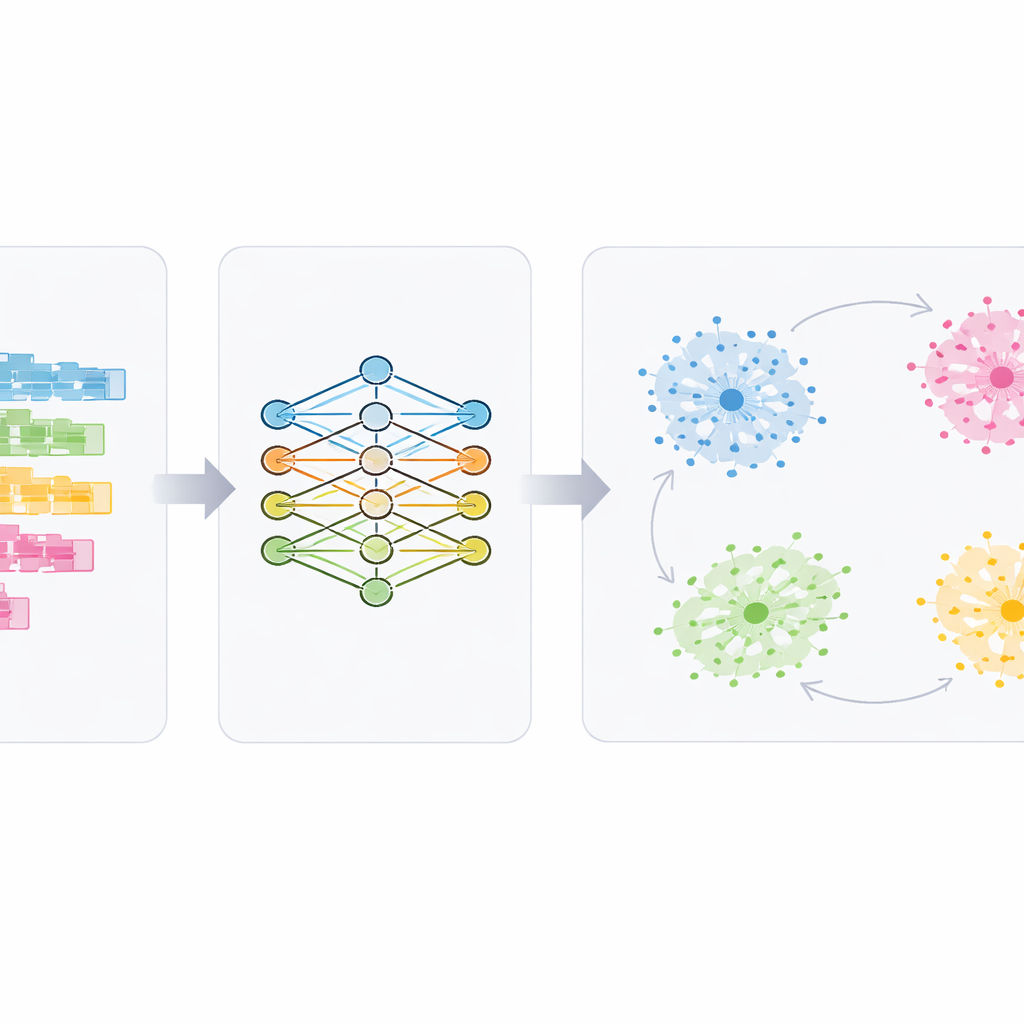
Den andra nyckelidén är att få modellen att lära en prototyp — en slags archetypisk fingeravtryck — för varje gest. Ett lättviktigt endimensionellt konvolutionellt neuralt nätverk omvandlar de kompakta EMG-egenskaperna till punkter i ett abstrakt rum. Under träningen beräknar systemet en central punkt (prototypen) för varje gest baserat på dess exempel och drar försiktigt nya exempel av den gesten mot denna mittpunkt samtidigt som det skiljer dem från andra gester. Detta upprätthålls med ett hybridträningsmål: en del fokuserar på att korrekt klassificera gester och en annan del formar geometrin i det inlärda rummet så att exempel av samma gest bildar täta, väl åtskilda kluster. Vid testtid använder modellen endast det effektiva klassificeringslagret, men den drar nytta av den strukturerade representation som prototyperna bidrog till att skapa.
Lära upp nya användare från bara några exempel
Den tredje ingrediensen är meta-inlärning, en träningsstrategi där modellen övar på att anpassa sig till många små klassificeringsuppgifter så att den blir bra på att lära från mycket få prov. Med en metod kallad Reptile simulerar EMG-Adapt upprepade gånger situationer där den måste särskilja bara några gester utifrån ett fåtal exempel vardera. Inom varje simulerad uppgift beräknas gestprototyperna på nytt i takt med att nätverkets parametrar uppdateras, vilket tillåter prototyperna att samevolvera med egenskaperna. Över många sådana uppgifter och subjekt lär sig modellen en initiering som snabbt kan finjusteras till en ny användare eller session efter att ha sett bara ett litet antal märkta exempel — ibland så få som 5, 10 eller 20 prover per gest.
Bevisa att det fungerar i realistiska förhållanden
För att testa EMG-Adapt använde författarna fem stora, offentliggjorda EMG-datamängder (Ninapro-samlingen), som inkluderar dussintals hand- och handledsgester från både icke-amputerade individer och amputerade. De utvärderade två krävande scenarier: över-session (träning och test på olika dagar från samma person) och över-användare (träning på vissa personer och test på helt nya). I båda scenarierna matchade eller överträffade EMG-Adapt konsekvent den senaste forskningen, särskilt när endast ett fåtal anpassningsprover tilläts. Den visade sig också vara mer effektiv: det endimensionella nätverket använde mycket mindre minne och tränade snabbare än standardnätverk i bildstil, och kördes i realtid både på kraftfulla maskiner och kompakta ARM-baserade enheter.
Vad detta betyder för framtida proteser och gränssnitt
För icke-specialister är huvudbudskapet att EMG-Adapt gör det mycket enklare för maskiner att förstå våra muskelsignaler utan att kräva utdragna, uttröttande träningssessioner. Genom att kombinera ett stabilt sätt att sammanfatta EMG-signaler, en prototypbaserad syn på gester och en träningsregim som är byggd kring snabb anpassning kan ramverket snabbt personaliseras till nya användare och förhållanden. Detta kan minska frustrationen vid omkalibrering för personer som använder protetiska händer, hjälpmedel eller geststyrda virtuella miljöer, och det banar väg för framtida system som kontinuerligt lär sig i bakgrunden medan vi lever våra dagliga liv.
Citering: Lee, H., Lim, B., Jiang, M. et al. Few-shot prototype adaptation for generalizable electromyography gesture recognition. Sci Rep 16, 12546 (2026). https://doi.org/10.1038/s41598-026-40352-6
Nyckelord: elektromiografi, gestigenkänning, protesstyrning, få-exempel-inlärning, människa-datorinteraktion