Clear Sky Science · fr
Adaptation de prototypes en few-shot pour la reconnaissance de gestes par électromyographie généralisable
Apprendre aux machines à lire les signaux musculaires
Imaginez contrôler une main prothétique, un curseur d’ordinateur ou un gant de réalité virtuelle simplement en contractant les muscles de l’avant‑bras. Cette promesse repose sur la traduction fiable de faibles signaux électriques musculaires en gestes reconnaissables. Or, dans la pratique, ces signaux varient d’un jour à l’autre et d’une personne à l’autre, obligeant les utilisateurs à subir de longues et fatigantes séances d’étalonnage. Cet article présente EMG‑Adapt, une nouvelle méthode qui apprend rapidement les motifs musculaires à partir de quelques exemples seulement, rapprochant les dispositifs commandés par les muscles d’une utilisation plus pratique et conviviale.
Pourquoi les signaux musculaires sont si difficiles à exploiter
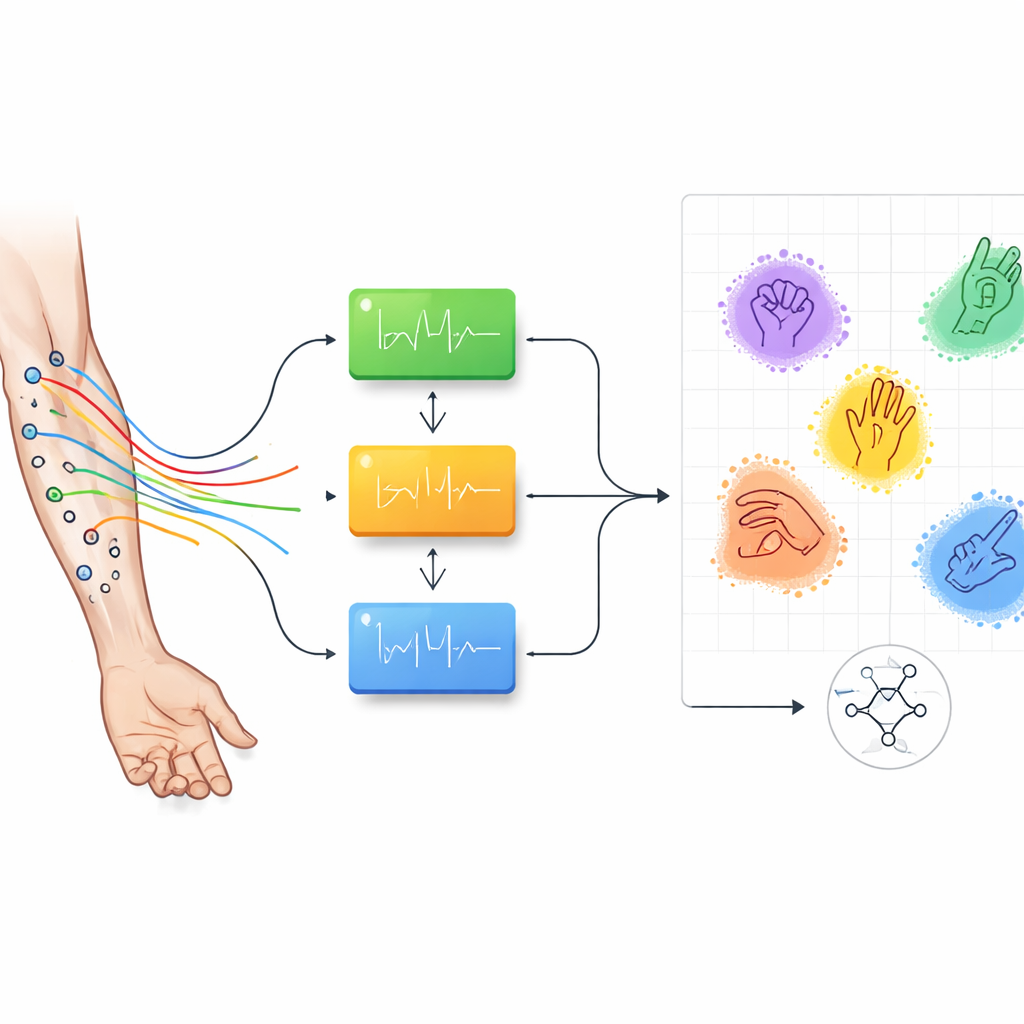
L’électromyographie (EMG) mesure de faibles activités électriques des muscles via des capteurs placés sur la peau. Ces signaux contiennent une riche information sur les mouvements intentionnels, mais ils sont notoirement instables. Le même geste de la main peut apparaître différemment dans les données si les électrodes bougent légèrement, si l’utilisateur est fatigué ou si la morphologie de la personne est différente. Les systèmes qui fonctionnent bien en laboratoire échouent souvent lorsqu’on les teste quelques jours plus tard ou sur une nouvelle personne. Recueillir suffisamment de données annotées pour chaque utilisateur est laborieux et fatigant, en particulier pour les personnes amputées qui bénéficieraient le plus d’un meilleur contrôle prothétique.
Capturer le cœur stable d’un geste
EMG‑Adapt aborde cette instabilité en transformant d’abord les signaux musculaires bruts en une représentation plus stable. Plutôt que d’alimenter le réseau neuronal avec des milliers de points bruts, les auteurs résument le signal de chaque capteur par un nombre compact qui capture son « empreinte » spectrale globale. Ils le font en moyennant des coefficients de cepstre, une façon de décrire comment l’énergie du signal est répartie en fréquence. En moyennant dans le temps et entre les canaux capteurs, la méthode supprime les bruits éphémères et met en valeur les composantes du signal qui restent cohérentes à chaque exécution d’un même geste. Cette description distillée transforme des traces désordonnées et spécifiques à un utilisateur en signatures plus nettes qui généralisent mieux entre sessions et individus.
Apprendre des prototypes de gestes
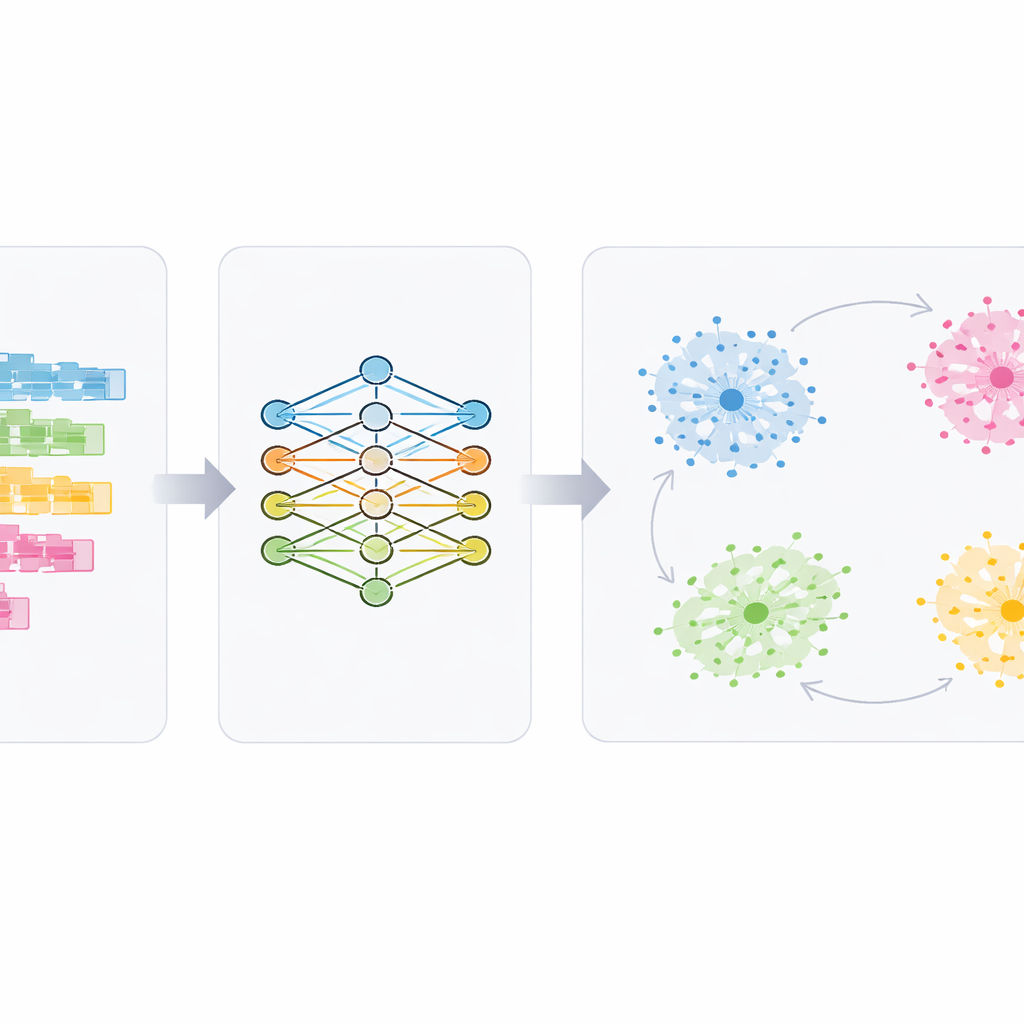
La seconde idée clé est de faire apprendre au modèle un prototype — une sorte d’empreinte archétypale — pour chaque geste. Un réseau de neurones convolutionnel léger en une dimension convertit les caractéristiques EMG compactes en points dans un espace abstrait. Pendant l’entraînement, le système calcule un point central (le prototype) pour chaque geste à partir de ses exemples et attire légèrement les nouveaux exemples de ce geste vers ce centre tout en éloignant les gestes différents. Cela est imposé par un objectif d’entraînement hybride : une partie vise la classification correcte des gestes, et l’autre façonne la géométrie de l’espace appris de sorte que les exemples d’un même geste forment des grappes serrées et bien séparées. Au moment du test, le modèle n’utilise que la couche de classification efficace, mais il bénéficie de la représentation structurée que les prototypes ont contribué à créer.
Apprendre de nouveaux utilisateurs à partir de quelques exemples
Le troisième ingrédient est le méta‑apprentissage, une stratégie d’entraînement où le modèle s’entraîne à s’adapter à de nombreuses petites tâches de classification afin de devenir capable d’apprendre à partir de très peu d’exemples. En utilisant une méthode appelée Reptile, EMG‑Adapt simule à répétition des situations où il doit distinguer quelques gestes à partir de quelques exemples chacun. Dans chaque tâche simulée, il recalcule les prototypes de gestes à mesure que les paramètres du réseau évoluent, permettant aux prototypes de co‑évoluer avec les caractéristiques. Au fil de nombreuses tâches et sujets, le modèle apprend une initialisation qui peut être rapidement ajustée pour un nouvel utilisateur ou une nouvelle session après n’avoir vu qu’un petit nombre d’exemples étiquetés — parfois aussi peu que 5, 10 ou 20 échantillons par geste.
Faire la preuve en conditions réalistes
Pour évaluer EMG‑Adapt, les auteurs ont utilisé cinq grands jeux de données EMG publics (la collection Ninapro), qui comprennent des dizaines de gestes de main et de poignet provenant de personnes valides et d’amputés. Ils ont évalué deux scénarios difficiles : cross‑session (entraînement et test sur des jours différents pour la même personne) et cross‑user (entraînement sur certaines personnes et test sur des personnes entièrement nouvelles). Dans les deux scénarios, EMG‑Adapt a systématiquement égalé ou surpassé les méthodes de pointe, surtout lorsque seuls quelques échantillons d’adaptation étaient autorisés. Il s’est aussi montré plus efficace : le réseau unidimensionnel utilisait beaucoup moins de mémoire et s’entraînait plus rapidement que les réseaux de type image standard, et fonctionnait en temps réel sur des machines haut de gamme comme sur des appareils compacts basés sur ARM.
Ce que cela signifie pour les prothèses et interfaces futures
Pour les non‑spécialistes, le message principal est qu’EMG‑Adapt facilite grandement la compréhension de nos signaux musculaires par les machines sans exiger de longues et épuisantes séances d’entraînement. En combinant une manière stable de résumer les signaux EMG, une vision des gestes fondée sur des prototypes et un régime d’entraînement axé sur l’adaptation rapide, le cadre peut se personnaliser rapidement à de nouveaux utilisateurs et conditions. Cela pourrait réduire la frustration liée aux recalibrages pour les personnes utilisant des mains prothétiques, des dispositifs d’assistance ou des environnements virtuels contrôlés par gestes, et pose les bases de systèmes futurs qui apprennent en continu en arrière‑plan pendant nos activités quotidiennes.
Citation: Lee, H., Lim, B., Jiang, M. et al. Few-shot prototype adaptation for generalizable electromyography gesture recognition. Sci Rep 16, 12546 (2026). https://doi.org/10.1038/s41598-026-40352-6
Mots-clés: électromyographie, reconnaissance de gestes, contrôle prothétique, apprentissage few-shot, interaction homme-machine