Clear Sky Science · it
Adattamento prototipico few-shot per il riconoscimento generalizzabile dei gesti tramite elettromiografia
Insegnare alle macchine a leggere i segnali muscolari
Immaginate di controllare una mano protesica, un cursore del computer o un guanto per la realtà virtuale semplicemente contraendo i muscoli dell’avambraccio. Questa promessa si basa sulla capacità di tradurre in modo affidabile i deboli segnali elettrici dei muscoli in gesti riconoscibili. Nella pratica, però, quei segnali cambiano di giorno in giorno e da persona a persona, costringendo gli utenti a lunghi e faticosi processi di calibrazione. Questo articolo presenta EMG-Adapt, un nuovo metodo che apprende rapidamente i pattern muscolari a partire da pochi esempi, avvicinando dispositivi controllati dai muscoli più pratici e semplici da usare.
Perché i segnali muscolari sono così difficili da usare
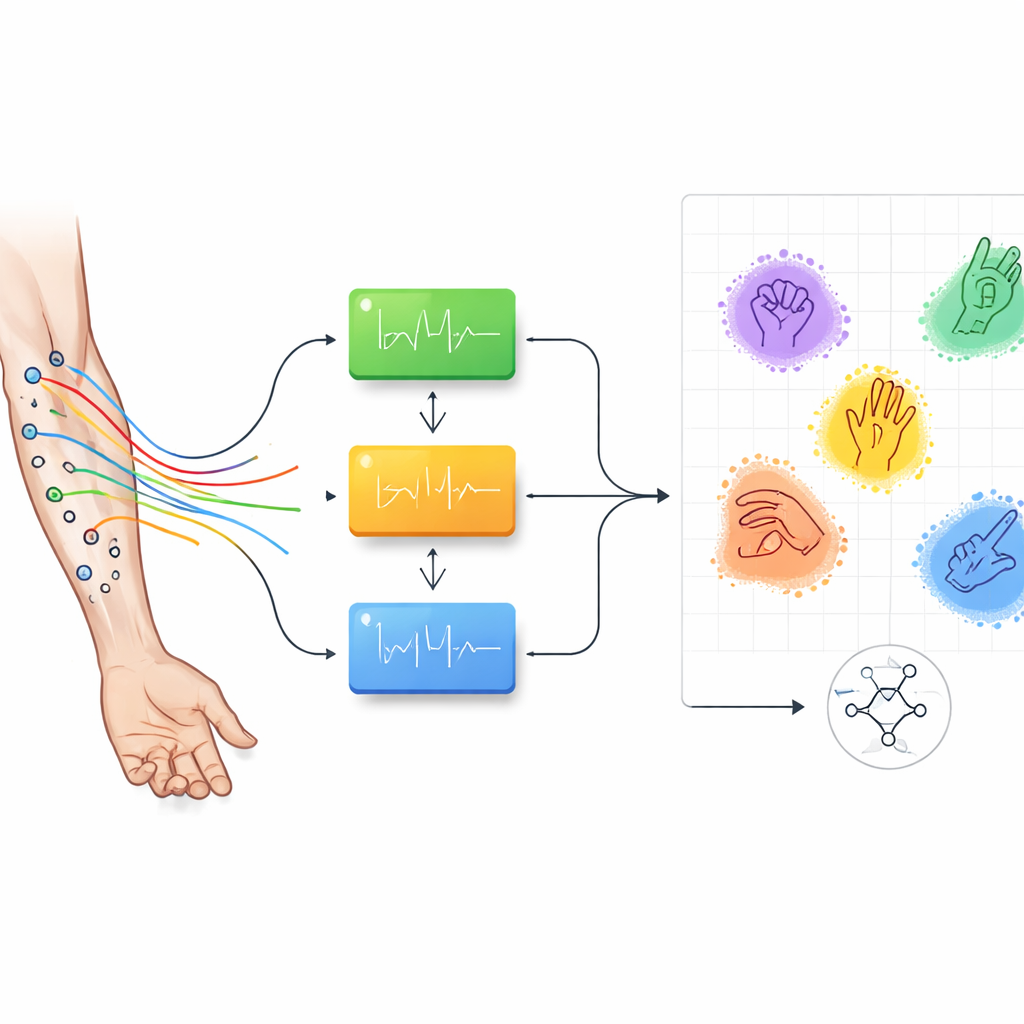
L’elettromiografia (EMG) misura la piccola attività elettrica dei muscoli tramite sensori sulla pelle. Questi segnali contengono informazioni ricche sulle intenzioni di movimento, ma sono notoriamente instabili. Lo stesso gesto della mano può apparire diverso nei dati se gli elettrodi si spostano leggermente, se l’utente è stanco o se la persona ha una conformazione corporea diversa. I sistemi che funzionano bene in laboratorio spesso falliscono se testati giorni dopo o su un nuovo soggetto. Raccogliere dati etichettati sufficienti per ciascun utente è lento e faticoso, soprattutto per le persone con amputazioni che trarrebbero il massimo beneficio da un controllo protesico migliore.
Catturare il nucleo stabile di un gesto
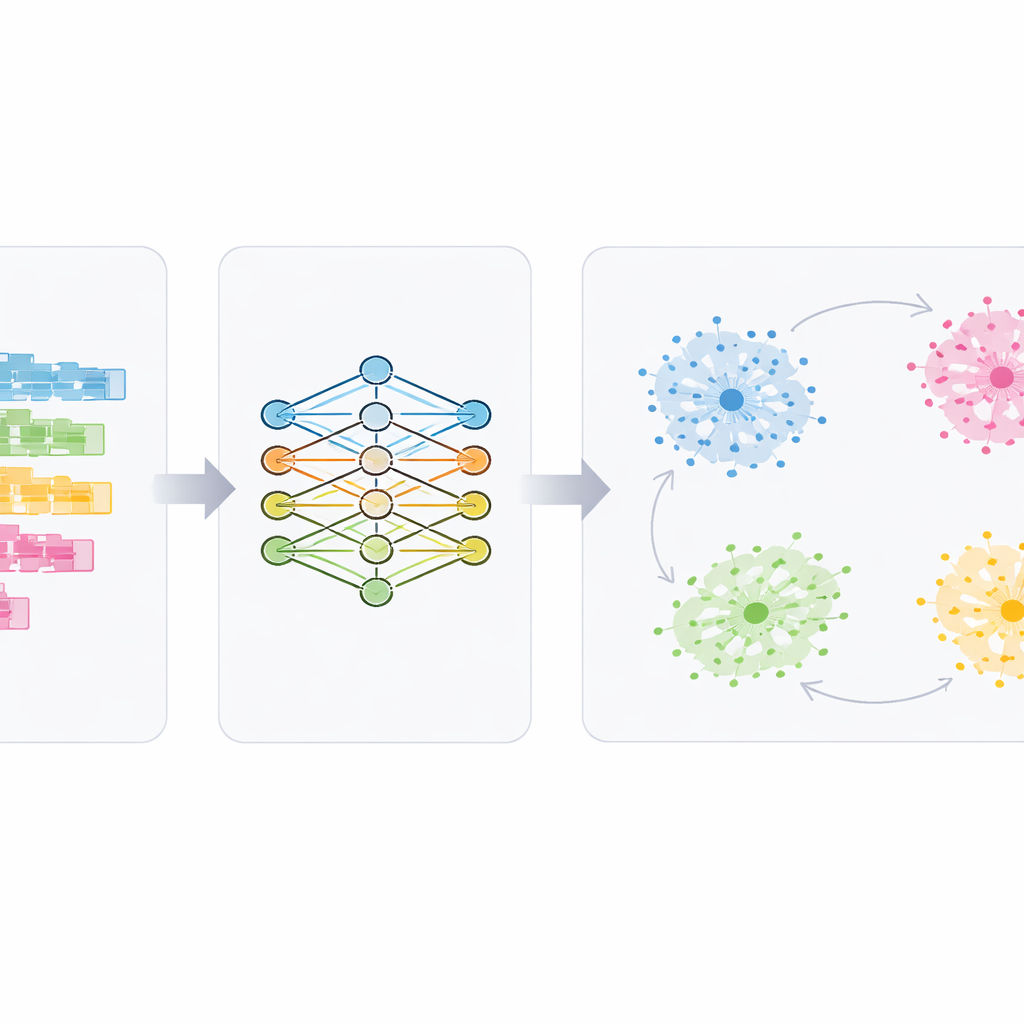
EMG-Adapt affronta questa instabilità trasformando innanzitutto i segnali muscolari grezzi in una rappresentazione più stabile. Invece di alimentare la rete neurale con migliaia di punti grezzi, gli autori riassumono il segnale di ciascun sensore in un numero compatto che cattura la sua «impronta» spettrale complessiva. Lo fanno mediando coefficienti cepstrali, un modo per descrivere come l’energia del segnale è distribuita nelle frequenze. Mediante una media nel tempo e tra i canali sensoriali, il metodo sopprime i rumori transitori ed enfatizza le parti del segnale che restano coerenti ogni volta che un gesto viene eseguito. Questa descrizione distillata trasforma tracce disordinate e specifiche dell’utente in firme più pulite che generalizzano meglio tra sessioni e persone.
Apprendere prototipi di gesti
La seconda idea chiave è far apprendere al modello un prototipo—una sorta di impronta archetipica—per ciascun gesto. Una leggera rete neurale convoluzionale unidimensionale converte le caratteristiche EMG compatte in punti di uno spazio astratto. Durante l’addestramento, il sistema calcola un punto centrale (il prototipo) per ogni gesto sulla base dei suoi esempi e attrae delicatamente i nuovi esempi di quel gesto verso questo centro mentre respinge i gesti diversi. Questo è imposto con un obiettivo di addestramento ibrido: una parte si concentra sulla classificazione corretta dei gesti e un’altra plasma la geometria dello spazio appreso così che gli esempi dello stesso gesto formino cluster compatti e ben separati. In fase di test, il modello usa solo lo strato di classificazione efficiente, ma beneficia della rappresentazione strutturata che i prototipi hanno contribuito a creare.
Imparare da nuovi utenti con pochi esempi
Il terzo ingrediente è il meta‑learning, una strategia di addestramento in cui il modello si esercita ad adattarsi a molti piccoli compiti di classificazione in modo da diventare abile nell’apprendere da pochissimi campioni. Usando un metodo chiamato Reptile, EMG-Adapt simula ripetutamente situazioni in cui deve distinguere pochi gesti a partire da una manciata di esempi ciascuno. All’interno di ciascun compito simulato, ricalcola i prototipi dei gesti mentre i parametri della rete si aggiornano, permettendo ai prototipi di co‑evolvere con le feature. Nel corso di molti compiti e soggetti, il modello impara un’inizializzazione che può essere rapidamente sintonizzata su un nuovo utente o su una nuova sessione dopo aver visto solo un piccolo numero di esempi etichettati—talvolta appena 5, 10 o 20 campioni per gesto.
Dimostrare l’efficacia in condizioni realistiche
Per testare EMG-Adapt, gli autori hanno usato cinque grandi dataset EMG pubblici (la collezione Ninapro), che includono decine di gesti di mano e polso sia di soggetti sani sia di amputati. Hanno valutato due scenari sfidanti: cross‑session (addestramento e test in giorni diversi sulla stessa persona) e cross‑user (addestramento su alcuni soggetti e test su persone totalmente nuove). In entrambi gli scenari, EMG-Adapt ha costantemente eguagliato o superato i metodi allo stato dell’arte, specialmente quando erano disponibili solo pochi campioni per l’adattamento. Si è inoltre dimostrato più efficiente: la rete unidimensionale usava molta meno memoria, si addestrava più rapidamente rispetto alle reti in stile immagini e funzionava in tempo reale sia su macchine potenti sia su dispositivi compatti basati su ARM.
Cosa significa per le protesi e le interfacce future
Per i non specialisti, il messaggio principale è che EMG-Adapt rende molto più semplice per le macchine comprendere i nostri segnali muscolari senza richiedere lunghe e faticose sessioni di addestramento. Combinando un modo stabile di riassumere i segnali EMG, una visione basata su prototipi dei gesti e un regime di pratica costruito attorno all’adattamento rapido, il framework può personalizzarsi velocemente su nuovi utenti e condizioni. Questo potrebbe ridurre la frustrazione delle ricalibrazioni per chi usa mani protesiche, dispositivi di assistenza o ambienti virtuali controllati tramite gesti, e pone le basi per sistemi futuri che apprendono continuamente in background mentre svolgiamo le nostre attività quotidiane.
Citazione: Lee, H., Lim, B., Jiang, M. et al. Few-shot prototype adaptation for generalizable electromyography gesture recognition. Sci Rep 16, 12546 (2026). https://doi.org/10.1038/s41598-026-40352-6
Parole chiave: elettromiografia, riconoscimento dei gesti, controllo di protesi, few-shot learning, interazione uomo-computer