Clear Sky Science · en
Few-shot prototype adaptation for generalizable electromyography gesture recognition
Teaching Machines to Read Muscle Signals
Imagine controlling a prosthetic hand, a computer cursor, or a virtual-reality glove just by tensing your forearm muscles. That promise depends on reliably translating faint electrical signals from muscles into recognizable gestures. Yet in real life those signals change from day to day and from person to person, forcing users to endure long and tiring calibration sessions. This paper introduces EMG-Adapt, a new method that learns muscle patterns quickly from only a handful of examples, bringing more practical and user-friendly muscle-controlled devices a step closer.
Why Muscle Signals Are So Hard to Use
Electromyography (EMG) measures tiny electrical activities in muscles through sensors on the skin. These signals carry rich information about our intended movements, but they are also notoriously unstable. The same hand gesture can look different in the data if the electrodes shift slightly, if the user is tired, or if the person has a different body type. Systems that work well in the lab often fail when tested days later or on a new person. Collecting enough labeled data from each user is slow and fatiguing, especially for people with amputations who stand to benefit most from better prosthetic control.
Capturing the Stable Heartbeat of a Gesture
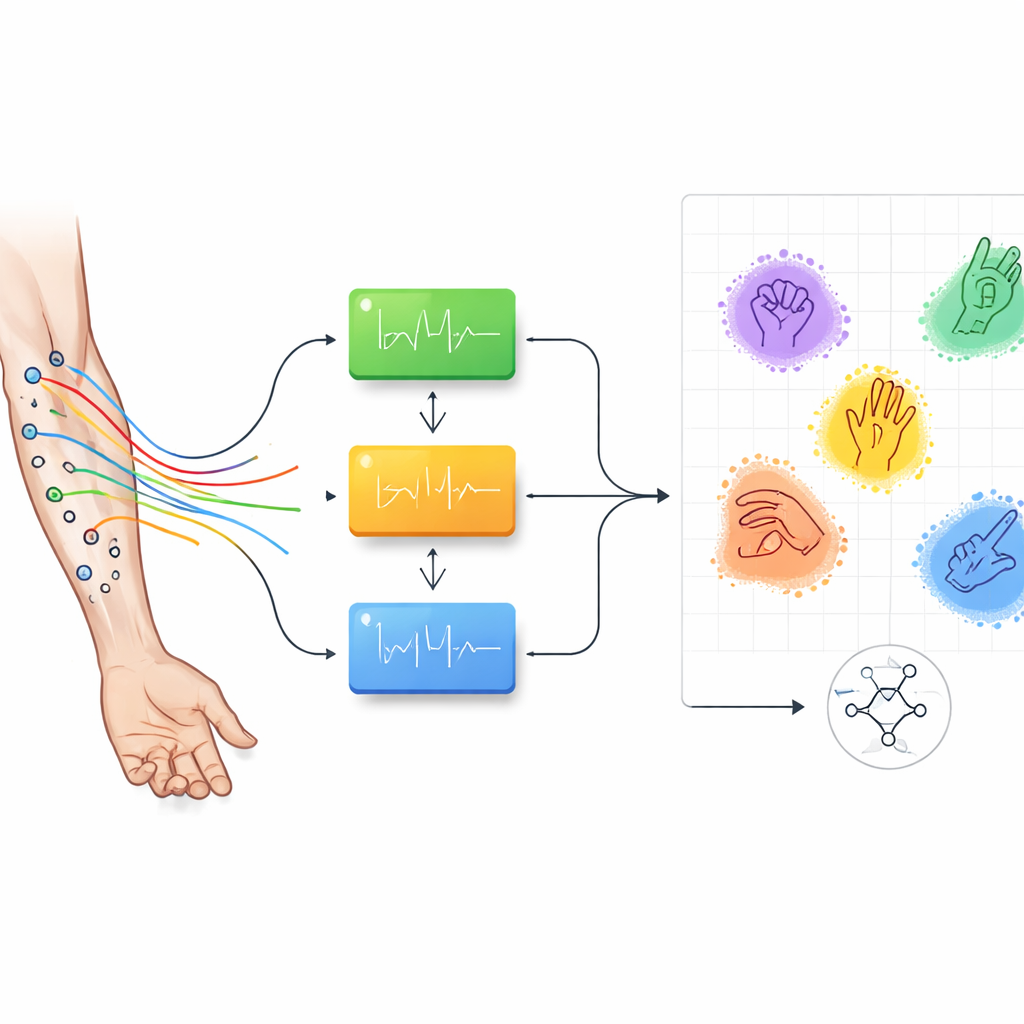
EMG-Adapt tackles this instability first by transforming raw muscle signals into a more stable representation. Instead of feeding the neural network thousands of raw data points, the authors summarize each sensor’s signal into a compact number that captures its overall spectral “fingerprint.” They do this by averaging cepstrum coefficients, a way of describing how the signal’s energy is spread across frequencies. By averaging across time and sensor channels, the method suppresses fleeting noise and emphasizes the parts of the signal that stay consistent every time a given gesture is performed. This distilled description turns messy, user-specific traces into cleaner signatures that generalize better across sessions and people.
Learning Prototypes of Gestures
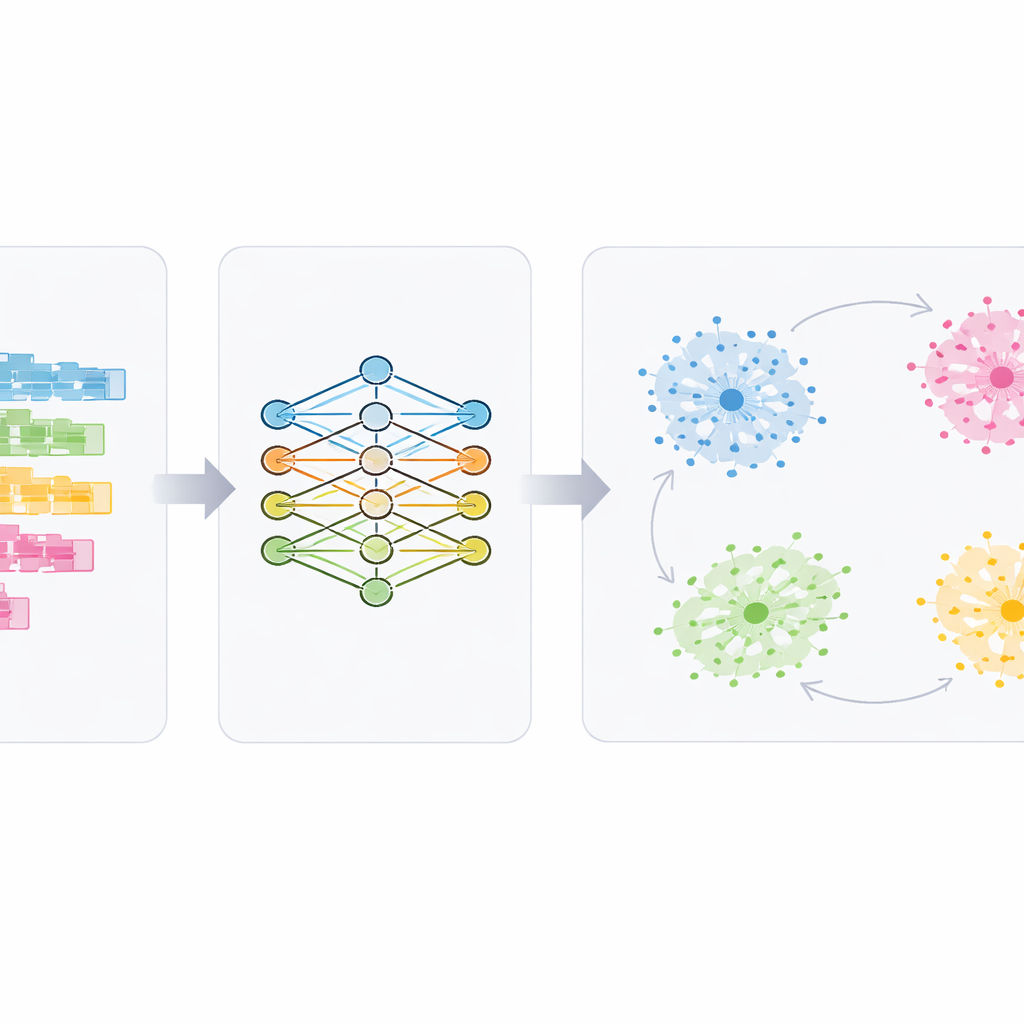
The second key idea is to have the model learn a prototype—a kind of archetypal fingerprint—for each gesture. A lightweight one‑dimensional convolutional neural network converts the compact EMG features into points in an abstract space. During training, the system computes a central point (the prototype) for each gesture based on its examples and gently pulls new examples of that gesture toward this center while pushing different gestures apart. This is enforced with a hybrid training objective: one part focuses on correctly classifying gestures, and another part shapes the geometry of the learned space so that examples of the same gesture form tight, well‑separated clusters. At test time, the model uses only the efficient classification layer, but it benefits from the structured representation that the prototypes helped create.
Learning New Users from Just a Few Examples
The third ingredient is meta-learning, a training strategy in which the model practices adapting to many small classification tasks so that it becomes good at learning from very few samples. Using a method called Reptile, EMG-Adapt repeatedly simulates situations where it must distinguish just a few gestures from a handful of examples each. Within each simulated task, it recalculates the gesture prototypes as the network’s parameters update, allowing the prototypes to co-evolve with the features. Over many such tasks and subjects, the model learns an initialization that can be quickly tuned to a new user or session after seeing only a small number of labeled examples—sometimes as few as 5, 10, or 20 samples per gesture.
Proving It Works in Realistic Conditions
To test EMG-Adapt, the authors used five large, publicly available EMG datasets (the Ninapro collection), which include dozens of hand and wrist gestures from both able-bodied individuals and amputees. They evaluated two challenging scenarios: cross-session (training and testing on different days from the same person) and cross-user (training on some people and testing on entirely new ones). Across both scenarios, EMG-Adapt consistently matched or surpassed state-of-the-art methods, especially when only a few adaptation samples were allowed. It also proved more efficient: the one-dimensional network used far less memory and trained faster than standard image-style networks, and ran in real time on both high-end machines and compact ARM-based devices.
What This Means for Future Prosthetics and Interfaces
For non-specialists, the core message is that EMG-Adapt makes it much easier for machines to understand our muscle signals without demanding lengthy, exhausting training sessions. By combining a stable way of summarizing EMG signals, a prototype-based view of gestures, and a practice regime built around fast adaptation, the framework can quickly personalize to new users and conditions. This could reduce the frustration of recalibration for people using prosthetic hands, assistive devices, or gesture-controlled virtual environments, and it lays the groundwork for future systems that learn continuously in the background as we go about our daily lives.
Citation: Lee, H., Lim, B., Jiang, M. et al. Few-shot prototype adaptation for generalizable electromyography gesture recognition. Sci Rep 16, 12546 (2026). https://doi.org/10.1038/s41598-026-40352-6
Keywords: electromyography, gesture recognition, prosthetic control, few-shot learning, human-computer interaction