Clear Sky Science · es
Adaptación de prototipos con pocos ejemplos para el reconocimiento generalizable de gestos por electromiografía
Enseñar a las máquinas a leer señales musculares
Imagínese controlar una mano protésica, un cursor de ordenador o un guante de realidad virtual simplemente tensando los músculos del antebrazo. Esa promesa depende de traducir de forma fiable las débiles señales eléctricas de los músculos en gestos reconocibles. Sin embargo, en la vida real esas señales cambian de un día para otro y de una persona a otra, obligando a los usuarios a someterse a largas y fatigantes sesiones de calibración. Este artículo presenta EMG-Adapt, un nuevo método que aprende los patrones musculares rápidamente a partir de solo unos pocos ejemplos, acercando un paso más dispositivos controlados por músculos que son prácticos y fáciles de usar.
Por qué las señales musculares son tan difíciles de usar
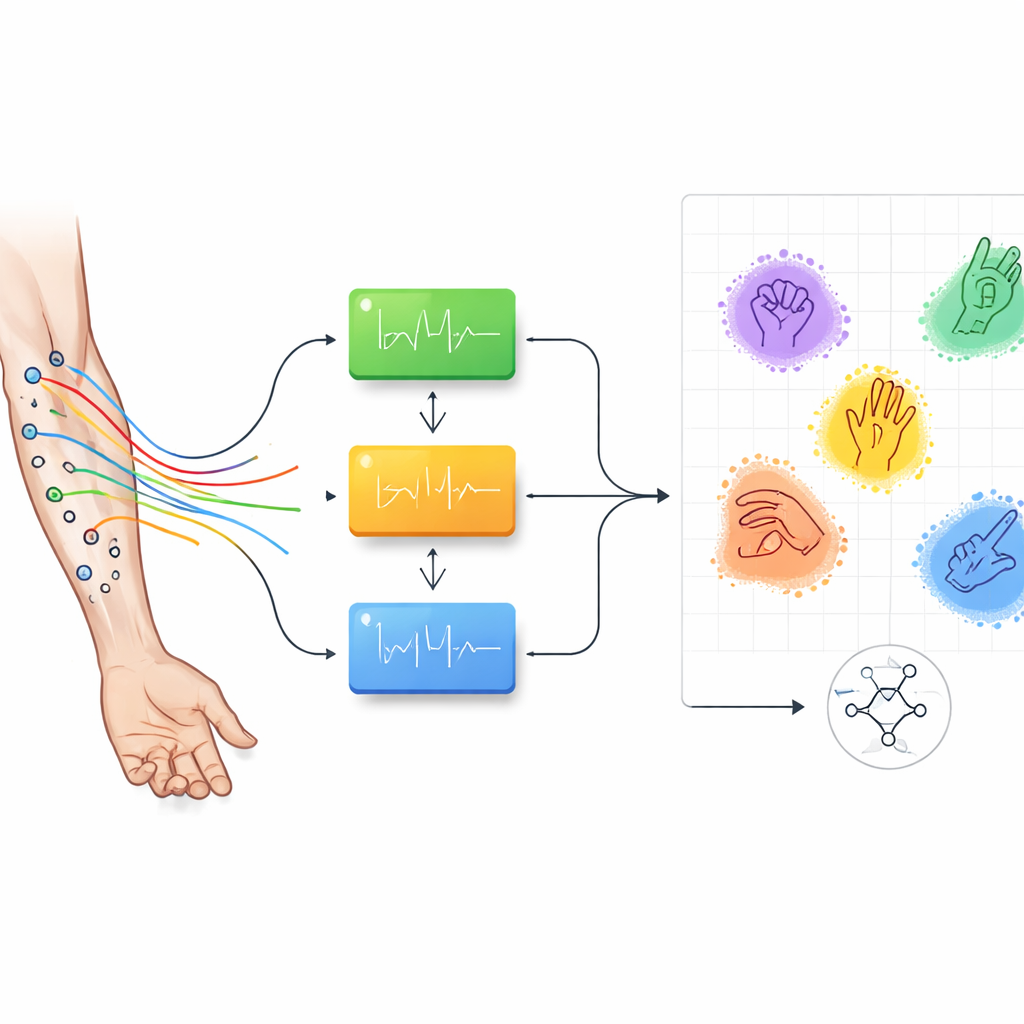
La electromiografía (EMG) mide pequeñas actividades eléctricas en los músculos mediante sensores sobre la piel. Estas señales contienen información rica sobre nuestros movimientos intencionados, pero también son notoriamente inestables. Un mismo gesto de la mano puede aparecer diferente en los datos si los electrodos se desplazan ligeramente, si el usuario está fatigado o si la persona tiene una constitución distinta. Los sistemas que funcionan bien en el laboratorio a menudo fallan cuando se prueban días después o en una nueva persona. Recopilar suficientes datos etiquetados de cada usuario es lento y agotador, especialmente para las personas con amputaciones, que son las que más podrían beneficiarse de un mejor control protésico.
Capturar el latido estable de un gesto
EMG-Adapt afronta esta inestabilidad transformando primero las señales musculares crudas en una representación más estable. En lugar de alimentar a la red neuronal con miles de puntos de datos sin procesar, los autores resumen la señal de cada sensor en un número compacto que captura su «huella» espectral general. Lo hacen promediando coeficientes del cepstrum, una forma de describir cómo se distribuye la energía de la señal a través de las frecuencias. Al promediar en el tiempo y entre los canales del sensor, el método suprime el ruido pasajero y enfatiza las partes de la señal que permanecen consistentes cada vez que se realiza un gesto concreto. Esta descripción destilada convierte trazas desordenadas y específicas de cada usuario en firmas más limpias que generalizan mejor entre sesiones y personas.
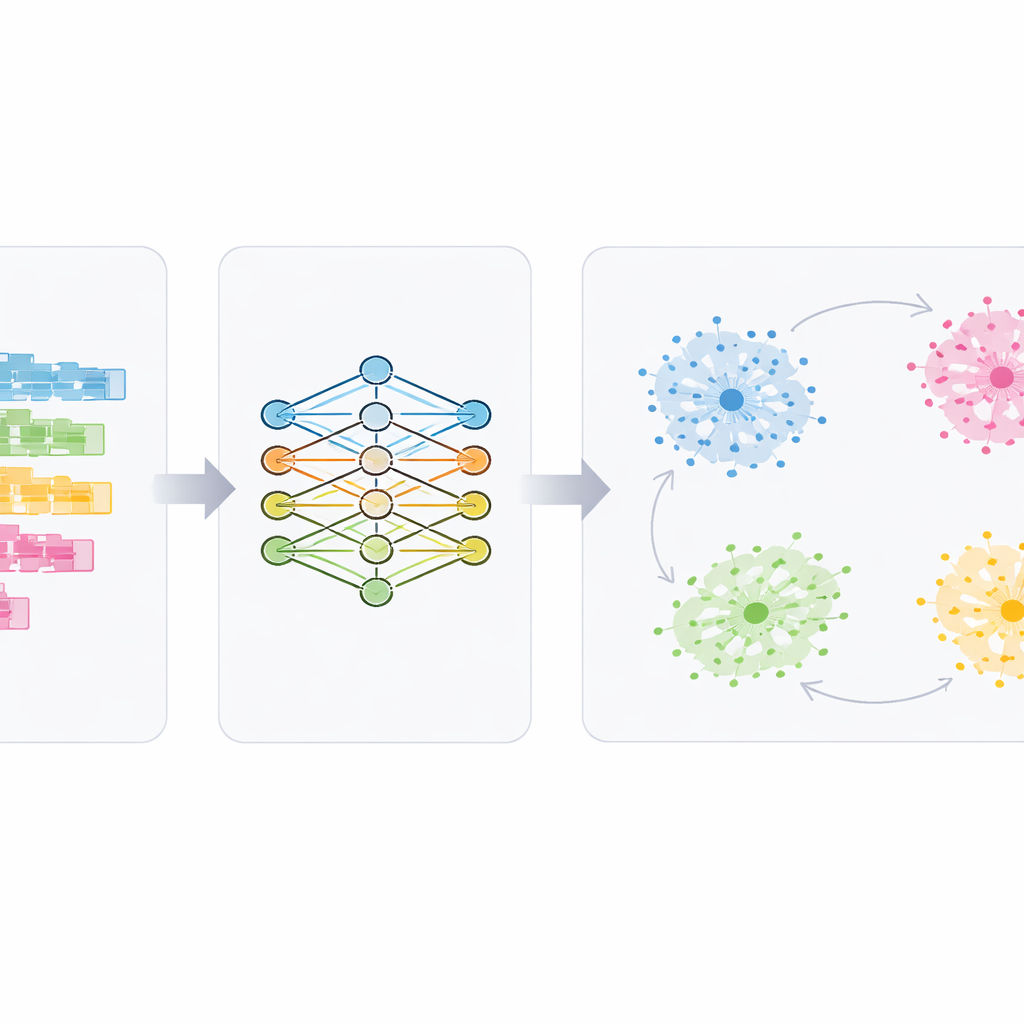
Aprender prototipos de gestos
La segunda idea clave es que el modelo aprenda un prototipo, una especie de huella arquetípica, para cada gesto. Una red neuronal convolucional ligera de una dimensión convierte las características EMG compactas en puntos dentro de un espacio abstracto. Durante el entrenamiento, el sistema calcula un punto central (el prototipo) para cada gesto basándose en sus ejemplos y atrae suavemente nuevos ejemplos de ese gesto hacia ese centro mientras separa los gestos distintos. Esto se refuerza con un objetivo de entrenamiento híbrido: una parte se centra en clasificar correctamente los gestos y otra da forma a la geometría del espacio aprendido para que los ejemplos del mismo gesto formen cúmulos ajustados y bien separados. En la prueba, el modelo utiliza solo la capa de clasificación eficiente, pero se beneficia de la representación estructurada que ayudaron a crear los prototipos.
Aprender nuevos usuarios con solo unos pocos ejemplos
El tercer ingrediente es el meta-aprendizaje, una estrategia de entrenamiento en la que el modelo practica adaptarse a muchas tareas de clasificación pequeñas para volverse hábil aprendiendo a partir de muy pocas muestras. Usando un método llamado Reptile, EMG-Adapt simula repetidamente situaciones en las que debe distinguir solo unos pocos gestos a partir de unos escasos ejemplos cada vez. Dentro de cada tarea simulada, recalcula los prototipos de gesto conforme se actualizan los parámetros de la red, permitiendo que los prototipos coevolucionen con las características. Tras muchas de estas tareas y sujetos, el modelo aprende una inicialización que puede ajustarse rápidamente a un nuevo usuario o sesión después de ver solo un pequeño número de ejemplos etiquetados, a veces tan pocos como 5, 10 o 20 muestras por gesto.
Demostrar que funciona en condiciones realistas
Para evaluar EMG-Adapt, los autores usaron cinco grandes conjuntos de datos EMG disponibles públicamente (la colección Ninapro), que incluyen docenas de gestos de mano y muñeca de personas con y sin amputaciones. Evaluaron dos escenarios desafiantes: entre sesiones (entrenar y probar en días distintos de la misma persona) y entre usuarios (entrenar con algunas personas y probar con otras completamente nuevas). En ambos escenarios, EMG-Adapt igualó o superó consistentemente a los métodos de vanguardia, especialmente cuando solo se permitían unos pocos ejemplos de adaptación. También demostró ser más eficiente: la red unidimensional usó mucha menos memoria y entrenó más rápido que las redes estilo imagen convencionales, y funcionó en tiempo real tanto en máquinas potentes como en dispositivos compactos basados en ARM.
Qué significa esto para futuras prótesis e interfaces
Para un público no especializado, el mensaje principal es que EMG-Adapt facilita mucho que las máquinas comprendan nuestras señales musculares sin exigir largas y agotadoras sesiones de entrenamiento. Al combinar una forma estable de resumir las señales EMG, una visión basada en prototipos de los gestos y un régimen de práctica diseñado para una adaptación rápida, el marco puede personalizarse con rapidez a nuevos usuarios y condiciones. Esto podría reducir la frustración de la recalibración para las personas que usan manos protésicas, dispositivos de asistencia o entornos virtuales controlados por gestos, y sienta las bases para sistemas futuros que aprendan de forma continua en segundo plano mientras llevamos a cabo nuestras actividades diarias.
Cita: Lee, H., Lim, B., Jiang, M. et al. Few-shot prototype adaptation for generalizable electromyography gesture recognition. Sci Rep 16, 12546 (2026). https://doi.org/10.1038/s41598-026-40352-6
Palabras clave: electromiografía, reconocimiento de gestos, control de prótesis, aprendizaje con pocos ejemplos, interacción persona-ordenador