Clear Sky Science · ja
一般化可能な筋電図ジェスチャー認識のための少数ショットプロトタイプ適応
機械に筋電信号の読み取りを教える
前腕の筋肉を緊張させるだけで義手やコンピュータのカーソル、あるいは仮想現実用のグローブを操作できると想像してみてください。こうした可能性は、筋肉からの微弱な電気信号を一貫して認識可能なジェスチャーへと変換する能力に依存します。しかし現実には、これらの信号は日ごと、個人ごとに変化し、長く疲れるキャリブレーション作業をユーザーに強いることがよくあります。本論文はEMG-Adaptという新しい手法を提案します。これはごく少数の例から迅速に筋電パターンを学習し、より実用的で使いやすい筋電制御デバイスの実現に近づけます。
筋電信号が扱いにくい理由
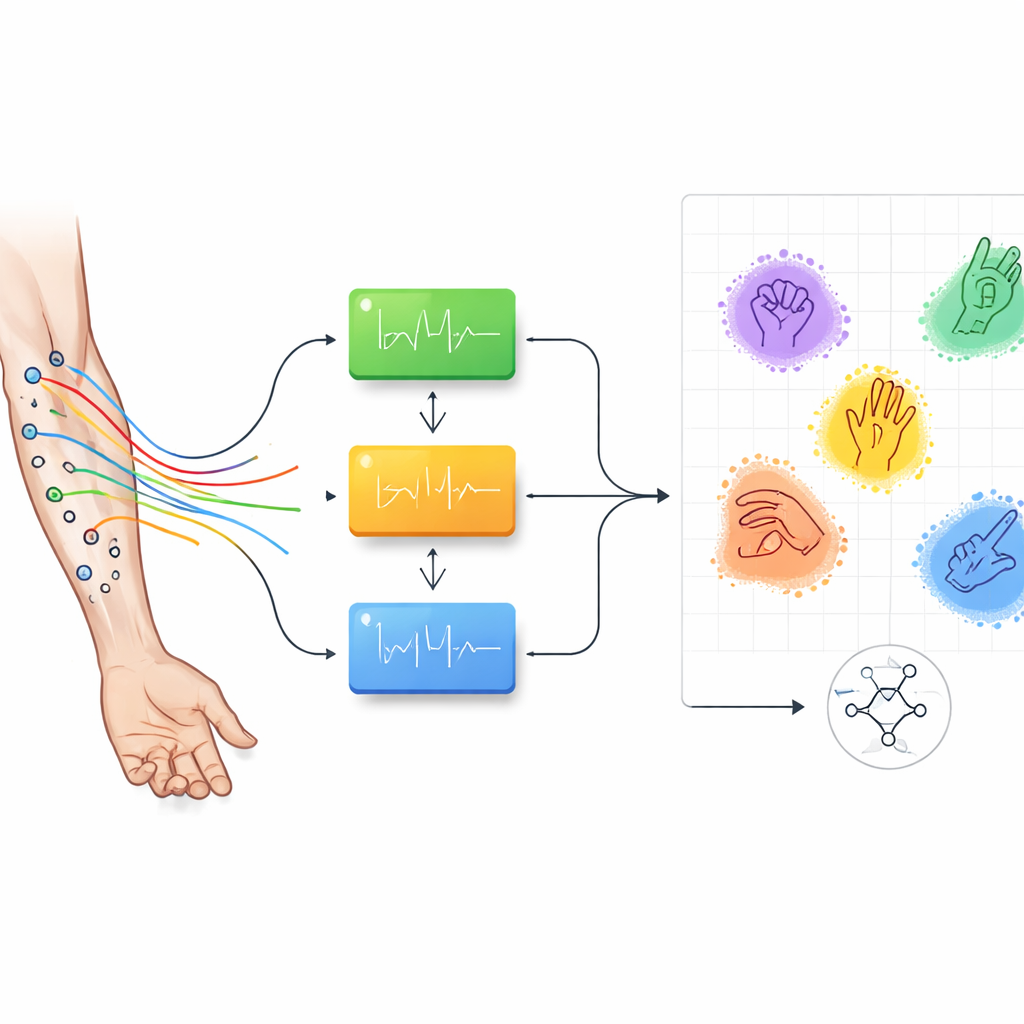
筋電図(EMG)は皮膚上のセンサーを通じて筋肉の微小な電気活動を計測します。これらの信号は意図した動きに関する豊富な情報を含みますが、同時に極めて不安定でもあります。同じ手のジェスチャーであっても、電極がわずかにずれた場合やユーザーが疲れている場合、あるいは体格が異なる人ではデータ上の見え方が変わります。実験室ではうまく動作するシステムでも、別の日や別の人に対しては機能しないことが多いのです。各ユーザーから十分なラベル付きデータを集めるのは遅く疲労を伴う作業で、特に義手の恩恵を最も受けるはずの切断者にとっては負担が大きくなります。
ジェスチャーの安定した「心拍」を捉える
EMG-Adaptはまず生の筋電信号をより安定した表現に変換することでこの不安定性に対処します。何千もの生データ点をニューラルネットワークに与える代わりに、各センサーの信号をその全体的なスペクトル的「フィンガープリント」を捉えるコンパクトな数値に要約します。具体的にはケプストラム係数を平均化することで、信号エネルギーが周波数にどのように分布しているかを記述します。時間とセンサーチャンネルにわたって平均化することで、一時的なノイズを抑え、あるジェスチャーが行われるたびに一貫して現れる信号成分を強調します。このように抽出された記述は、雑然としたユーザー依存のトレースをよりクリーンな署名に変え、セッションや人を超えてよりよく一般化します。
ジェスチャーのプロトタイプを学習する
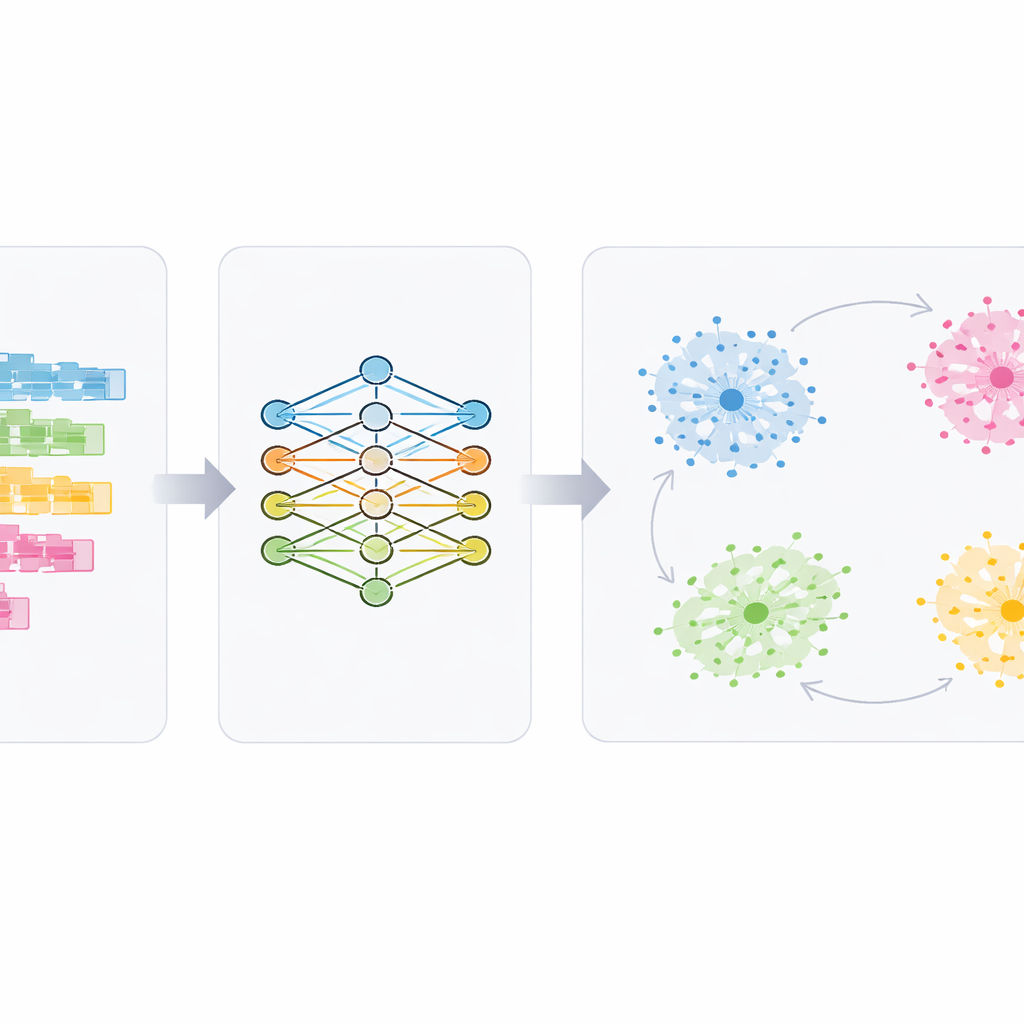
第二の重要な考えは、モデルに各ジェスチャーのプロトタイプ、つまり典型的なフィンガープリントを学習させることです。軽量な1次元畳み込みニューラルネットワークがコンパクトなEMG特徴量を抽象空間の点に変換します。訓練中、システムは各ジェスチャーの例に基づいて中心点(プロトタイプ)を計算し、そのジェスチャーの新しい例をその中心に穏やかに引き寄せ、異なるジェスチャーは互いに離すように働きかけます。これにはハイブリッドな訓練目的が用いられ、一方はジェスチャーを正しく分類することに注力し、もう一方は学習された空間の幾何を形作ることで同一ジェスチャーの例が緊密で明確に分離されたクラスタを形成するようにします。テスト時には効率的な分類層のみを用いますが、プロトタイプが作り上げた構造化された表現の恩恵を受けます。
わずかな例から新しいユーザーを学ぶ
三つ目の要素はメタラーニングです。これはモデルが多数の小さな分類タスクに適応する練習を繰り返すことで、非常に少ないサンプルから学ぶ能力を高める訓練戦略です。Reptileと呼ばれる手法を用いて、EMG-Adaptはごく少数の例から数種類のジェスチャーを区別しなければならない状況を繰り返しシミュレートします。各シミュレーションタスク内で、ネットワークのパラメータが更新されるにつれてジェスチャープロトタイプも再計算され、プロトタイプと特徴が共進化できるようにします。多くのタスクと被験者を通じて、モデルは新しいユーザーやセッションに対してわずかなラベル付き例(場合によっては1ジェスチャーあたり5、10、20サンプル程度)を見ただけで素早く調整できる初期化を学習します。
現実的な条件での有効性を立証する
EMG-Adaptを検証するため、著者たちは大規模で公開されている5つのEMGデータセット(Ninaproコレクション)を使用しました。これらは健常者と切断者の両方による多数の手および手首のジェスチャーを含みます。評価では二つの厳しいシナリオを設定しました:クロスセッション(同一人物の別日で訓練・テスト)とクロスユーザー(ある人々で訓練し、まったく新しい人々でテスト)。両シナリオにわたって、EMG-Adaptは特に適応用のサンプルが少ない場合において、最先端手法と同等またはそれを上回る成績を安定的に示しました。また効率性でも優れており、1次元ネットワークは標準的な画像型ネットワークに比べてはるかに少ないメモリで高速に訓練でき、高性能マシンや小型のARMベース機器の両方でリアルタイムに動作しました。
将来の義肢やインターフェースにとっての意義
専門外の読者に向けた核心は、EMG-Adaptによって機械が筋電信号を長く疲れる訓練なしで理解しやすくなる、という点です。EMG信号を安定的に要約する方法、プロトタイプに基づくジェスチャーの見方、そして高速適応を中心にした訓練制度を組み合わせることで、このフレームワークは新しいユーザーや条件に素早く個別化できます。これにより義手や支援機器、ジェスチャー制御された仮想環境での再キャリブレーションに伴う不満を軽減し、日常生活の中で継続的に背後で学習するような将来のシステムの基盤を築く可能性があります。
引用: Lee, H., Lim, B., Jiang, M. et al. Few-shot prototype adaptation for generalizable electromyography gesture recognition. Sci Rep 16, 12546 (2026). https://doi.org/10.1038/s41598-026-40352-6
キーワード: 筋電図, ジェスチャー認識, 義肢制御, 少数ショット学習, ヒューマンコンピュータインタラクション