Clear Sky Science · pt
Adaptação de protótipo com poucos exemplos para reconhecimento generalizável de gestos por eletromiografia
Ensinando Máquinas a Ler Sinais Musculares
Imagine controlar uma mão protética, um cursor de computador ou uma luva de realidade virtual apenas tensionando os músculos do antebraço. Essa promessa depende de traduzir de forma confiável sinais elétricos fracos dos músculos em gestos reconhecíveis. No entanto, na prática esses sinais mudam de dia para dia e de pessoa para pessoa, obrigando os usuários a passar por longas e cansativas sessões de calibração. Este artigo apresenta o EMG-Adapt, um novo método que aprende padrões musculares rapidamente a partir de apenas alguns exemplos, aproximando dispositivos controlados por músculos de um uso mais prático e amigável.
Por Que Sinais Musculares São Tão Difíceis de Usar
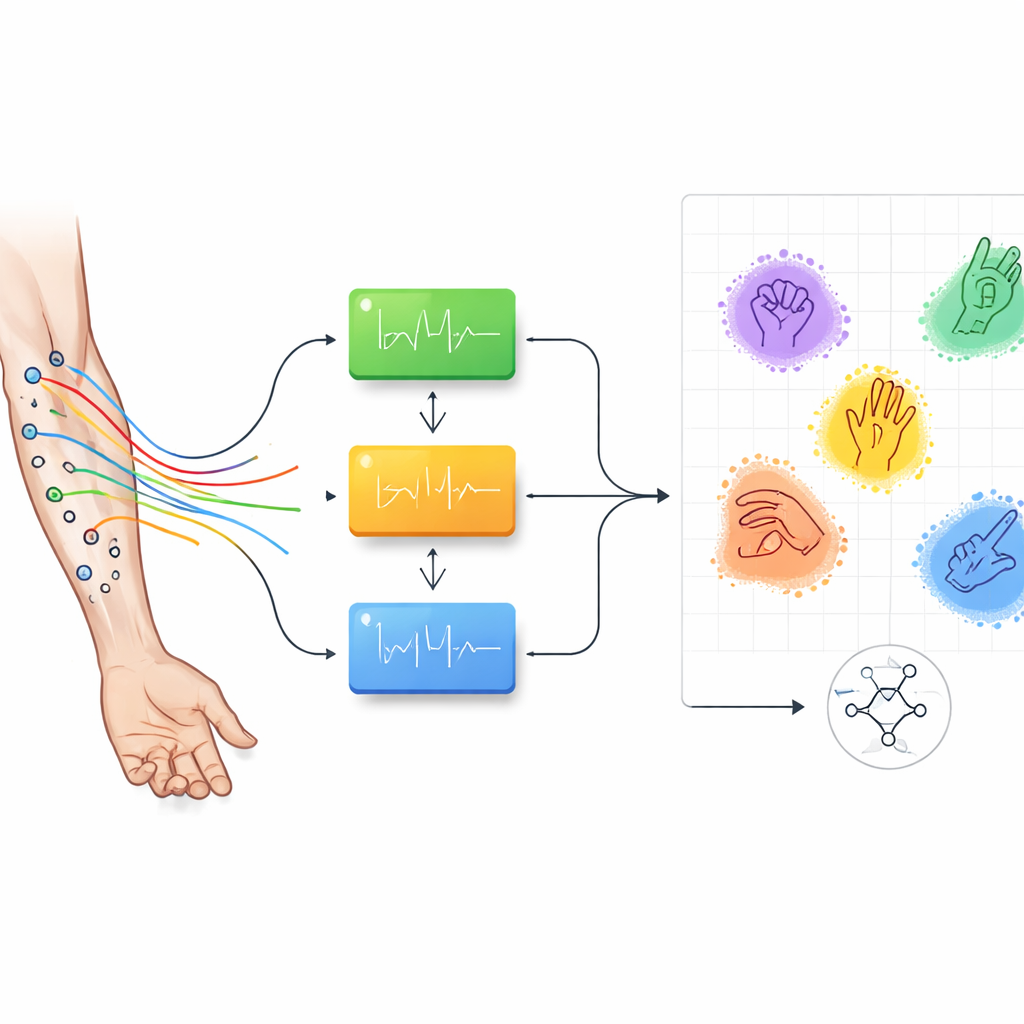
A eletromiografia (EMG) mede pequenas atividades elétricas nos músculos por meio de sensores sobre a pele. Esses sinais carregam informação rica sobre nossos movimentos pretendidos, mas também são notoriamente instáveis. O mesmo gesto de mão pode apresentar-se de forma diferente nos dados se os eletrodos se deslocarem ligeiramente, se o usuário estiver cansado ou se a pessoa tiver um tipo corporal distinto. Sistemas que funcionam bem em laboratório frequentemente falham quando testados dias depois ou em uma nova pessoa. Coletar dados rotulados suficientes de cada usuário é lento e cansativo, especialmente para pessoas amputadas, que são as que mais se beneficiariam de um controle protético melhor.
Capturando o Batimento Estável de um Gesto
O EMG-Adapt enfrenta essa instabilidade primeiro transformando os sinais musculares brutos em uma representação mais estável. Em vez de alimentar a rede neural com milhares de pontos de dado brutos, os autores resumem o sinal de cada sensor em um número compacto que captura sua “impressão” espectral geral. Fazem isso ao calcular médias de coeficientes de cepstrum, uma forma de descrever como a energia do sinal se distribui nas frequências. Ao promediar ao longo do tempo e entre canais de sensores, o método suprime ruídos passageiros e enfatiza as partes do sinal que permanecem consistentes sempre que um dado gesto é executado. Essa descrição destilada transforma traços confusos e específicos de cada usuário em assinaturas mais limpas que generalizam melhor entre sessões e pessoas.
Aprendendo Protótipos de Gestos
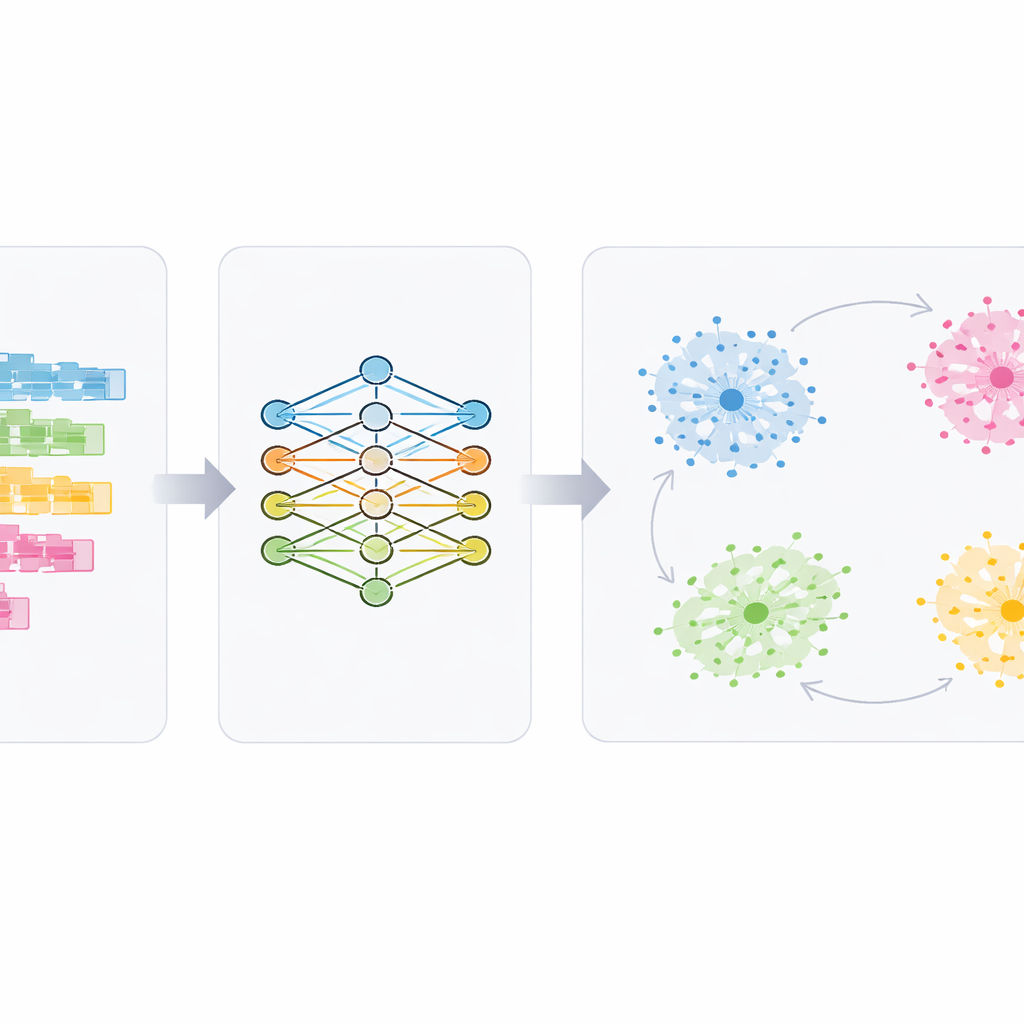
A segunda ideia-chave é fazer com que o modelo aprenda um protótipo — uma espécie de impressão digital arquetípica — para cada gesto. Uma rede neural convolucional leve unidimensional converte as características EMG compactas em pontos em um espaço abstrato. Durante o treinamento, o sistema calcula um ponto central (o protótipo) para cada gesto com base em seus exemplos e puxa gentilmente novos exemplos daquele gesto em direção a esse centro enquanto afasta gestos diferentes. Isso é imposto por um objetivo de treinamento híbrido: uma parte foca em classificar corretamente os gestos, e outra modela a geometria do espaço aprendido para que exemplos do mesmo gesto formem aglomerados apertados e bem separados. No teste, o modelo usa apenas a camada de classificação eficiente, mas beneficia-se da representação estruturada que os protótipos ajudaram a criar.
Aprendendo Novos Usuários com Poucos Exemplos
O terceiro ingrediente é o meta-aprendizado, uma estratégia de treinamento na qual o modelo pratica adaptar-se a muitas pequenas tarefas de classificação para que se torne bom em aprender a partir de pouquíssimas amostras. Usando um método chamado Reptile, o EMG-Adapt simula repetidamente situações em que deve distinguir apenas alguns gestos a partir de um punhado de exemplos cada. Dentro de cada tarefa simulada, recalcula-se os protótipos dos gestos à medida que os parâmetros da rede são atualizados, permitindo que os protótipos coevoluam com as características. Ao longo de muitas dessas tarefas e sujeitos, o modelo aprende uma inicialização que pode ser rapidamente ajustada a um novo usuário ou sessão após ver apenas um pequeno número de exemplos rotulados — às vezes tão poucos quanto 5, 10 ou 20 amostras por gesto.
Comprovando que Funciona em Condições Realistas
Para testar o EMG-Adapt, os autores utilizaram cinco grandes conjuntos de dados EMG públicos (a coleção Ninapro), que incluem dezenas de gestos de mão e punho de indivíduos sem deficiência e amputados. Avaliaram dois cenários desafiadores: entre sessões (treinamento e teste em dias diferentes para a mesma pessoa) e entre usuários (treinamento em algumas pessoas e teste em outras totalmente novas). Em ambos os cenários, o EMG-Adapt consistentemente igualou ou superou métodos de ponta, especialmente quando apenas algumas amostras de adaptação eram permitidas. Também se mostrou mais eficiente: a rede unidimensional usou muito menos memória e treinou mais rápido que redes estilo imagem padrão, e operou em tempo real tanto em máquinas de alto desempenho quanto em dispositivos compactos baseados em ARM.
O Que Isso Significa para Próteses e Interfaces Futuras
Para não especialistas, a mensagem central é que o EMG-Adapt facilita muito que máquinas compreendam nossos sinais musculares sem exigir longas e exaustivas sessões de treino. Ao combinar uma forma estável de resumir sinais EMG, uma visão baseada em protótipos dos gestos e um regime de prática voltado para adaptação rápida, o quadro pode personalizar-se rapidamente a novos usuários e condições. Isso pode reduzir a frustração de recalibração para pessoas que usam mãos protéticas, dispositivos assistivos ou ambientes virtuais controlados por gestos, e prepara o terreno para sistemas futuros que aprendem continuamente em segundo plano enquanto seguimos nossa rotina diária.
Citação: Lee, H., Lim, B., Jiang, M. et al. Few-shot prototype adaptation for generalizable electromyography gesture recognition. Sci Rep 16, 12546 (2026). https://doi.org/10.1038/s41598-026-40352-6
Palavras-chave: eletromiografia, reconhecimento de gestos, controle de próteses, few-shot learning, interação homem-computador