Clear Sky Science · nl
Few-shot prototype-adaptatie voor generaliseerbare spierelektromyografie-gebarenherkenning
Machines leren spiersignalen lezen
Stel je voor dat je een prothetische hand, een computermuisaanwijzer of een virtualreality‑handschoen bedient door alleen je onderarmspieren aan te spannen. Die belofte rust op het betrouwbaar vertalen van zwakke elektrische signalen uit spieren naar herkenbare gebaren. In de praktijk veranderen die signalen echter van dag tot dag en van persoon tot persoon, waardoor gebruikers lange en vermoeiende kalibratiesessies moeten doorlopen. Dit artikel introduceert EMG‑Adapt, een nieuwe methode die snel spierpatronen leert uit slechts een handvol voorbeelden, en zo een stap dichterbij praktisch en gebruiksvriendelijk spiergestuurd materiaal brengt.
Waarom spiersignalen zo moeilijk te gebruiken zijn
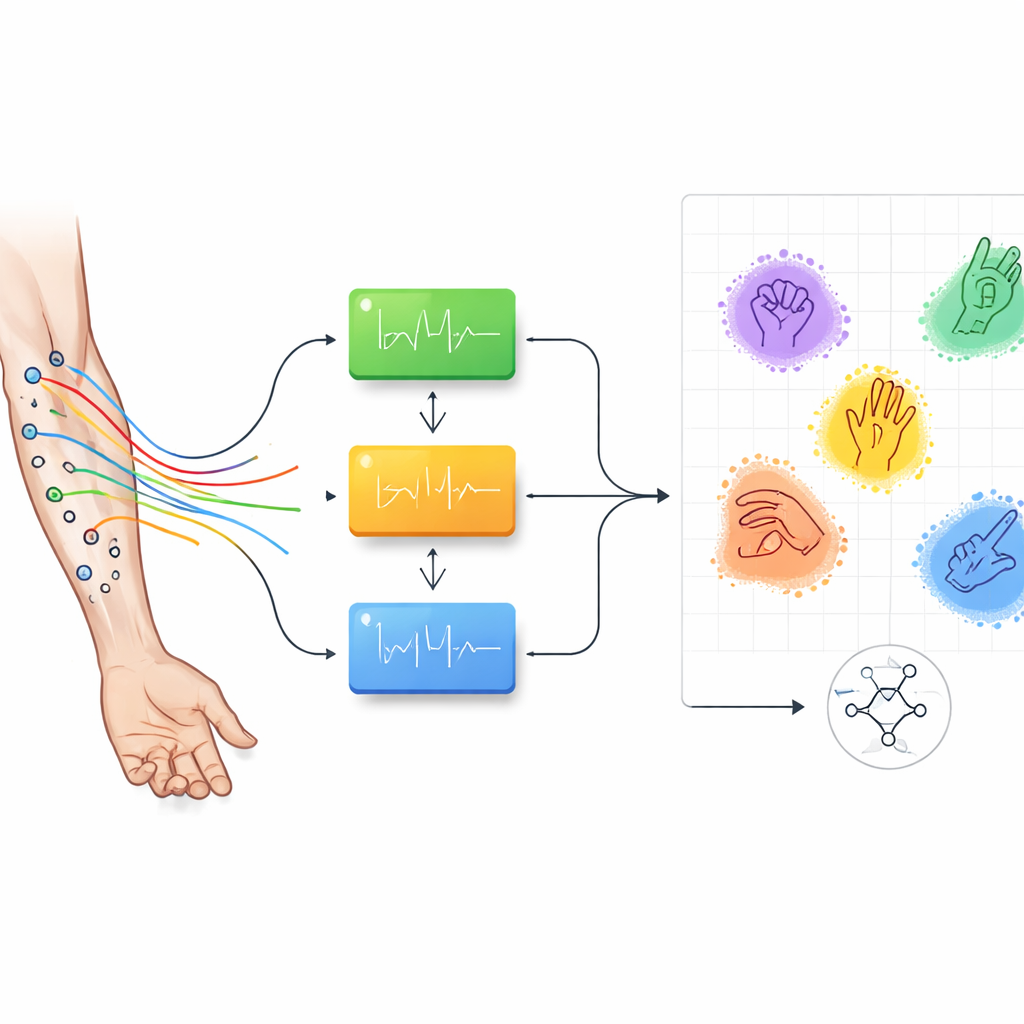
Elektromyografie (EMG) meet kleine elektrische activiteit in spieren via sensoren op de huid. Deze signalen bevatten rijke informatie over onze bedoelde bewegingen, maar zijn ook berucht onstabiel. hetzelfde handgebaar kan er anders uitzien in de meetgegevens als de elektroden iets verschuiven, als de gebruiker vermoeid is of als iemand een ander lichaamstype heeft. Systemen die in het lab goed werken falen vaak wanneer ze dagen later of bij een nieuwe persoon getest worden. Het verzamelen van voldoende gelabelde data per gebruiker is traag en vermoeiend, vooral voor mensen met amputaties die het meest zouden profiteren van betere prothesebesturing.
Het stabiele hart van een gebaar vastleggen
EMG‑Adapt pakt deze instabiliteit eerst aan door ruwe spiersignalen om te zetten in een stabielere representatie. In plaats van duizenden ruwe datapunten naar het neurale netwerk te voeren, vat de methode het signaal van elke sensor samen in een compacte waarde die het algemene spectrale "vingerafdruk" vastlegt. Dit doen de auteurs door cepstrumcoëfficiënten te middelen, een manier om te beschrijven hoe de energie van het signaal over frequenties is verdeeld. Door te middelen over tijd en sensorkanalen onderdrukt de methode vluchtige ruis en legt ze de nadruk op de onderdelen van het signaal die consistent blijven elke keer dat een bepaald gebaar wordt uitgevoerd. Deze gedistilleerde beschrijving verandert rommelige, gebruiker‑specifieke sporen in schonere signaturen die beter generaliseren over sessies en mensen.
Prototypes van gebaren leren
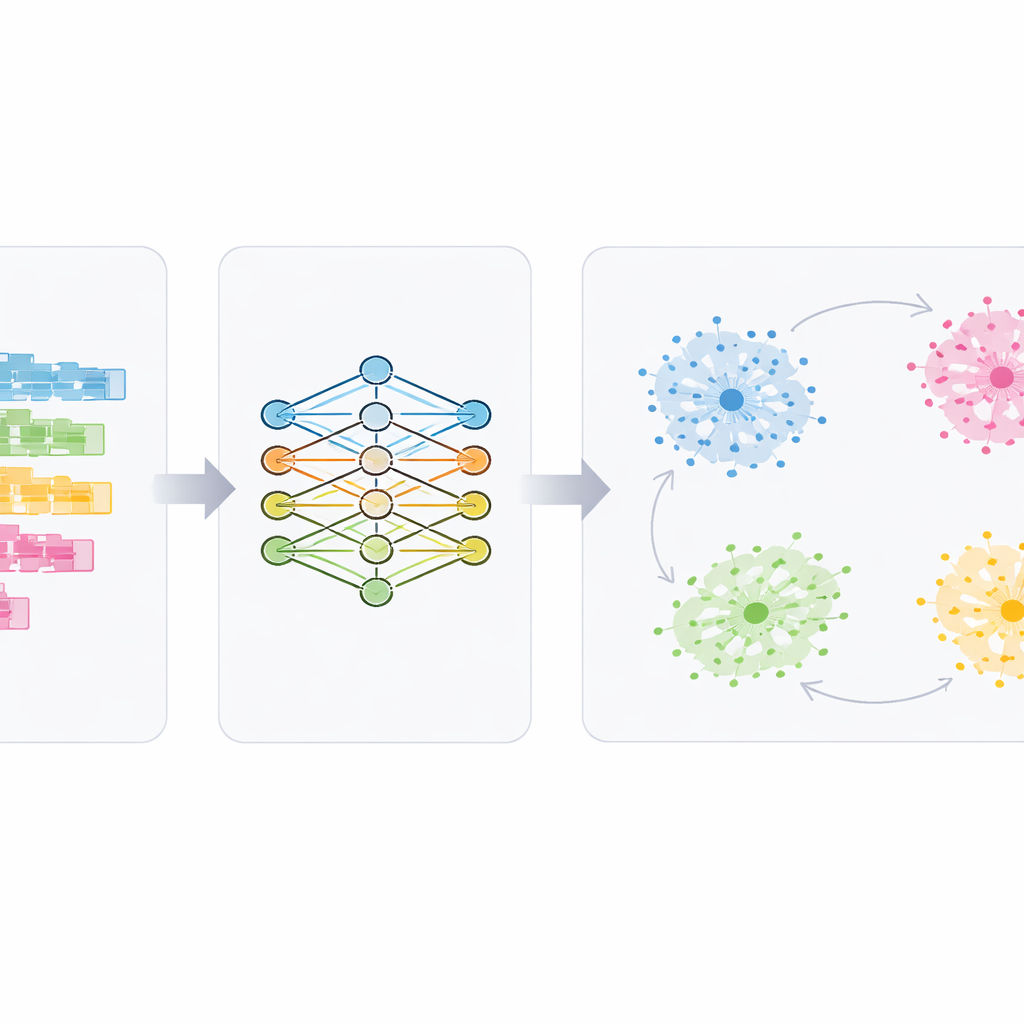
Het tweede kernidee is dat het model een prototype leert — een soort archetypische vingerafdruk — voor elk gebaar. Een lichtgewicht één‑dimensionaal convolutioneel neuraal netwerk zet de compacte EMG‑kenmerken om in punten in een abstracte ruimte. Tijdens training berekent het systeem voor elk gebaar een centraal punt (de prototype) op basis van de voorbeelden en trekt het nieuwe voorbeelden van dat gebaar zachtjes naar dit centrum terwijl het verschillende gebaren uit elkaar drijft. Dit wordt afgedwongen met een hybride trainingsdoel: een deel richt zich op het correct classificeren van gebaren en een ander deel vormt de geometrie van de geleerde ruimte zodat voorbeelden van hetzelfde gebaar strakke, goed gescheiden clusters vormen. Tijdens testen gebruikt het model alleen de efficiënte classificatielaag, maar het profiteert van de gestructureerde representatie die de prototypes geholpen hebben te creëren.
Nieuwe gebruikers leren met slechts enkele voorbeelden
Het derde ingrediënt is meta‑leren, een trainingsstrategie waarin het model oefent met het aanpassen aan veel kleine classificatietaken zodat het goed wordt in leren van zeer weinig voorbeelden. Met een methode genaamd Reptile simuleert EMG‑Adapt herhaaldelijk situaties waarin het slechts enkele gebaren uit een handjevol voorbeelden moet onderscheiden. Binnen elke gesimuleerde taak herberekent het de gebaarprototypes terwijl de netwerkparameters worden bijgewerkt, waardoor de prototypes kunnen meeevolueren met de features. Over vele dergelijke taken en proefpersonen leert het model een initialisatie die snel kan worden bijgesteld voor een nieuwe gebruiker of sessie na slechts een klein aantal gelabelde voorbeelden — soms zo weinig als 5, 10 of 20 monsters per gebaar.
Aantonen dat het werkt onder realistische omstandigheden
Om EMG‑Adapt te testen gebruikten de auteurs vijf grote, openbaar beschikbare EMG‑datasets (de Ninapro‑collectie), die tientallen hand‑ en polsgebaren bevatten van zowel niet‑geamputeerde personen als amputees. Ze evalueerden twee uitdagende scenario’s: cross‑session (trainen en testen op verschillende dagen van dezelfde persoon) en cross‑user (trainen op sommige personen en testen op volledig nieuwe personen). In beide scenario’s evenaarde of overtrof EMG‑Adapt consequent de state‑of‑the‑art methoden, vooral wanneer slechts enkele adaptatiesamples toegestaan waren. Het bleek ook efficiënter: het één‑dimensionale netwerk gebruikte veel minder geheugen en trainde sneller dan standaard beeld‑achtige netwerken, en draaide in realtime op zowel krachtige machines als compacte ARM‑gebaseerde apparaten.
Wat dit betekent voor toekomstige protheses en interfaces
Voor niet‑specialisten is de kernboodschap dat EMG‑Adapt het veel eenvoudiger maakt voor machines om onze spiersignalen te begrijpen zonder langdurige, uitputtende trainingssessies te eisen. Door een stabiele manier om EMG‑signalen samen te vatten te combineren met een prototype‑gebaseerde kijk op gebaren en een oefenregime gericht op snelle adaptatie, kan het raamwerk zich snel personaliseren naar nieuwe gebruikers en omstandigheden. Dit kan de frustratie van recalibratie verminderen voor mensen die prothetische handen, ondersteunende apparaten of gebaar‑gestuurde virtuele omgevingen gebruiken, en legt de basis voor toekomstige systemen die continu op de achtergrond leren terwijl we ons dagelijkse leven leiden.
Bronvermelding: Lee, H., Lim, B., Jiang, M. et al. Few-shot prototype adaptation for generalizable electromyography gesture recognition. Sci Rep 16, 12546 (2026). https://doi.org/10.1038/s41598-026-40352-6
Trefwoorden: elektromyografie, gebarenherkenning, prothesebesturing, few-shot learning, mens-computerinteractie