Clear Sky Science · zh
高分辨率风洞数据集:气体传感器对缩尺模型景观中蒸汽羽流的响应
追踪空气中看不见的踪迹
想象一下,你需要用只能逐点采样的设备去追踪看不见的气体泄漏或有毒云。这正是希望让无人机和机器人帮助发现污染源、监测工业场所,甚至探测其它行星稀薄大气的团队所面临的挑战。本文介绍了Red:Vapor,这是在大型风洞中生成的详尽实验数据集。它精确展示了人为蒸汽云如何在缩尺工业厂区周围扭曲和扩散,以及移动探针上的不同气体传感器在穿过羽流时的响应。结果为设计更智能的气体探测机器人和更准确描述空气中物质行为的模型提供了丰富的测试平台。
为何追踪空中羽流如此困难
释放到空气中的气体和气溶胶很少以平滑、可预测的云团形式飘散。风速波动、流动变得湍流,建筑物与地形打断气流,产生混沌的涡旋。同时,大多数化学传感器更像单像素而非相机:它们只在某一时空点给出一个数值,而且常常响应缓慢。这意味着研究人员必须从极为稀疏的测量中重建三维且不断变化的羽流。计算机模拟能提供帮助,但运行成本高且难以与现实核验,尤其当传感器漂移、对湿度敏感或受无人机下洗气流干扰等特性介入时更是如此。
在风洞中构建微型工业世界
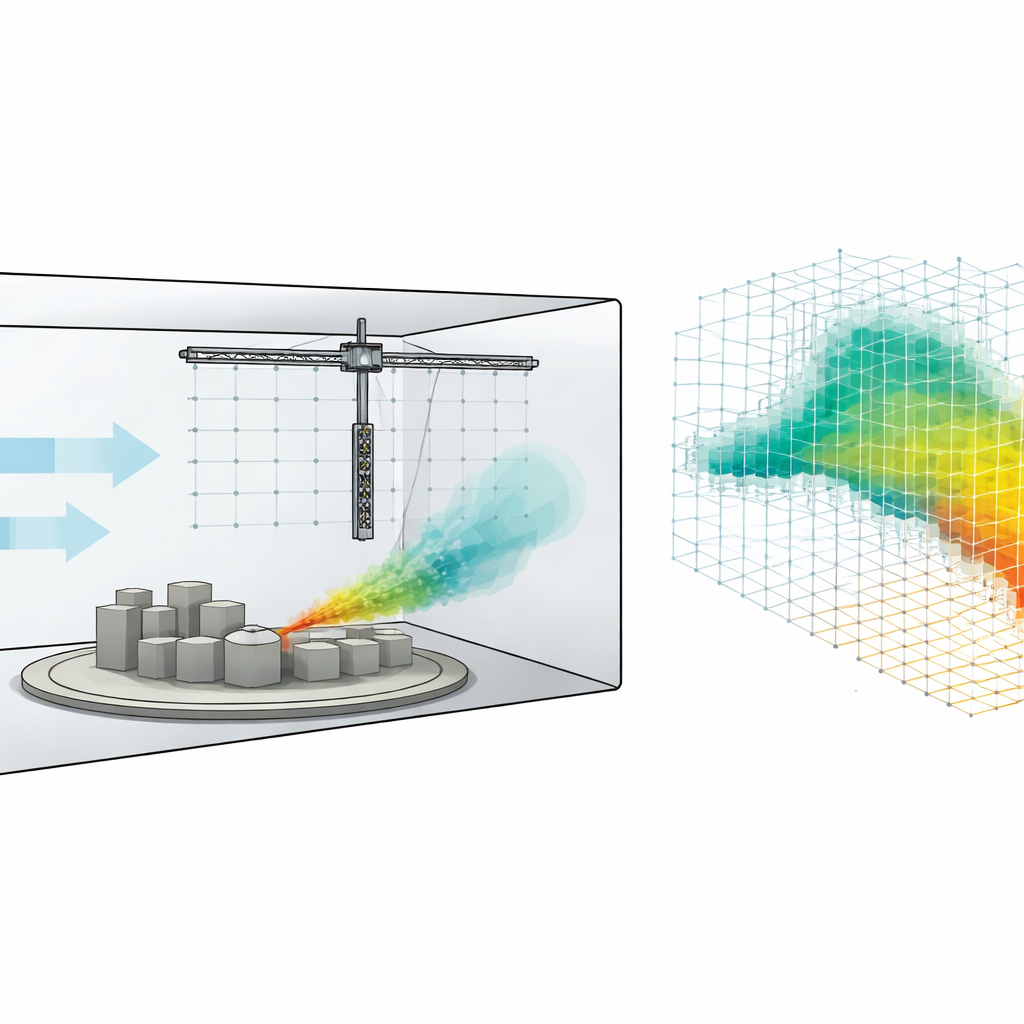
为以可控方式应对这些困难,团队使用了荷德合作的德国—荷兰风洞设施中的低速风洞。在其三米长的试验段内,他们安装了一个圆形转盘,摆放了缩尺的建筑、储罐和烟囱,按约1:50的比例模拟工业厂区。地板下的商用烟雾机通过管道将定制的烟雾混合物输送到圆柱罐的小开口,模拟储罐泄漏。该烟雾混合物主要含丙二醇和三乙二醇,并加入少量乙醇作为易检测的示踪物,形成既可见又可被气体传感器探测到的蒸汽羽流。通过旋转转盘和改变风速,研究者再现了不同风向和流动状态,从较有序的气流到障碍物后方复杂的尾流与涡旋。
类似机器人的三维嗅探器
在微型景观上方,作者安装了一台大型计算机控制的龙门架,充当精确的机械臂。悬挂其下的是一根垂直探针,由四个相同的传感平台按24厘米间隔堆叠而成。每个平台配备了低成本的金属氧化物气体传感器、一台更先进的光电离检测器,以及测量温度、湿度、气压和三维风速的小型仪器。探针可在亚厘米精度下移动到三维网格中的精确点位,停留足够长让传感器反应,然后继续移动。在八次“网格”实验中,团队系统地对风洞体积中多达240 × 240 × 96 立方厘米的空间在数百个位置进行了采样。在另外22次“穿越”运行中,探针沿模仿无人机穿越羽流的曲线路径连续移动,捕捉传感信号在穿越羽流时的动态升降。
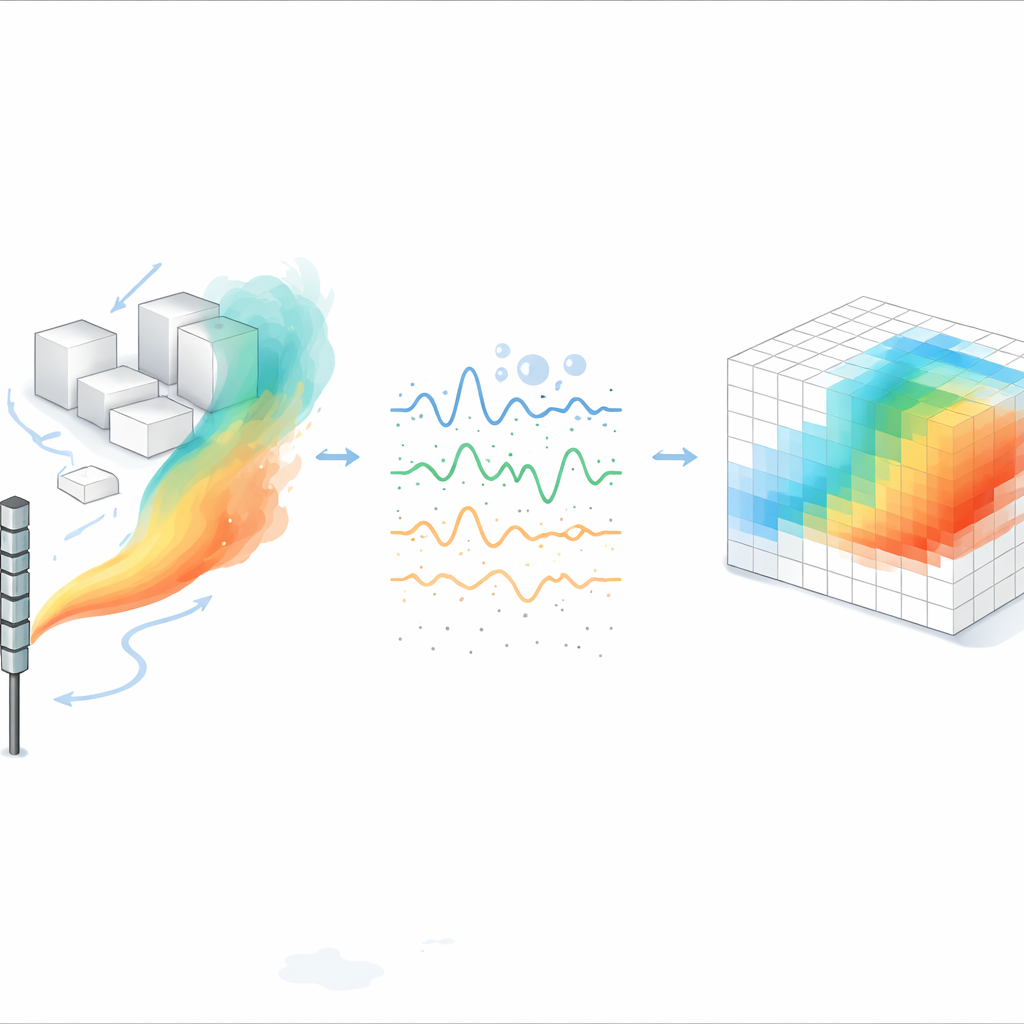
从嘈杂的阵阵气味到清晰的三维地图
原始传感器输出受多种除气体浓度以外的因素影响:温度和湿度会改变金属氧化物传感器的电阻,供电电压波动会移动读数,封闭的风洞会逐渐积累背景蒸汽浓度。因此,作者将大量工作用于精心清洗和变换测量数据。他们同时记录温度与湿度与传感电阻,采用既有的物理模型来补偿环境影响,并将传感器比值转换为类浓度值。位于上风处的两台固定传感单元在干净空气中追踪缓慢上升的背景,然后将其从其他读数中减去。最后,对网格实验而言,他们在每个位置将多次采样平均为单个数值,将风洞体积转化为存储气体水平、风向量和环境数据的三维小立方阵列(体素)。
用于更智能气体探测机器人的标准测试床
Red:Vapor 数据集在早期工作基础上进一步扩展,结合了高空间分辨率、完整的三维覆盖、现实的障碍物布置,以及在受控风况下同时记录的低成本与高端传感器数据。它使研究者能够比较廉价金属氧化物传感器与快速线性光电离检测器的表现差异,探索传感器需要停留多长时间才能获取有意义的读数,并测试用于映射气体分布与定位源头的算法。由于从原始电压到预处理体素图和微型厂区三维模型的一切数据均公开可得,该数据集可作为共享基准。对非专业读者而言,关键结论是:这项工作提供了一个现实的“风洞游乐场”,可以在将新的气味侦测机器人和数据驱动的羽流模型部署到真实工业场所或其他星球之前,在此开发、测试并公平比较它们的性能。
引用: Hinsen, P., Wiedemann, T., Shutin, D. et al. High-Resolution Wind Tunnel Dataset of Gas Sensor Responses to Vapor Plumes in Scale Model Landscapes. Sci Data 13, 586 (2026). https://doi.org/10.1038/s41597-026-06927-8
关键词: 机器人气体探测, 风洞实验, 蒸汽羽流映射, 气体传感器数据集, 源定位