Clear Sky Science · ru
Высокоточное датасетные измерения в аэродинамической трубе: ответы газовых сенсоров на паровые шлейфы в уменьшенных ландшафтах
Следуя невидимым тропам в воздухе
Представьте, что вам нужно обнаружить утечку газа или токсическое облако, которое вы не видите, с помощью машин, способных лишь по очереди «нюхать» крошечные образцы воздуха в одной точке. Перед такими командами стоит задача научить дроны и роботов находить источники загрязнений, контролировать промышленные объекты и даже исследовать разрежённую атмосферу других планет. В этой статье представлен Red:Vapor — подробный экспериментальный датасет, собранный в гигантской аэродинамической трубе. Он показывает, как искусственный паровой облак скручивается и распространяется вокруг уменьшенной модели промышленного предприятия и как разные газовые сенсоры на движущемся пробнике реагируют при прохождении через шлейф. Получившийся набор данных — богатая тестовая база для учёных и инженеров, разрабатывающих более умных газообнаруживающих роботов и лучшие модели поведения веществ в воздухе.
Почему отслеживать воздушные шлейфы так сложно
Газы и аэрозоли, попадая в воздух, редко уносятся в виде ровных, предсказуемых облаков. Скорость ветра колеблется, потоки переходят в режим турбулентности, а здания и рельеф разрушают течение, порождая хаотичные завихрения. В то же время большинство химических сенсоров ведут себя скорее как один пиксель, чем как камера: они дают лишь одно значение в данной точке пространства и времени и часто реагируют медленно. Это значит, что исследователям приходится восстанавливать трёхмерный, постоянно меняющийся шлейф по очень разреженным измерениям. Компьютерные симуляции помогают, но они дороги в расчёте и трудно проверяются на соответствие реальности, особенно с учётом особенностей сенсоров — дрейфа, чувствительности к влажности или помех от набегающего воздушного потока дрона.
Построение миниатюрного индустриального мира в трубе
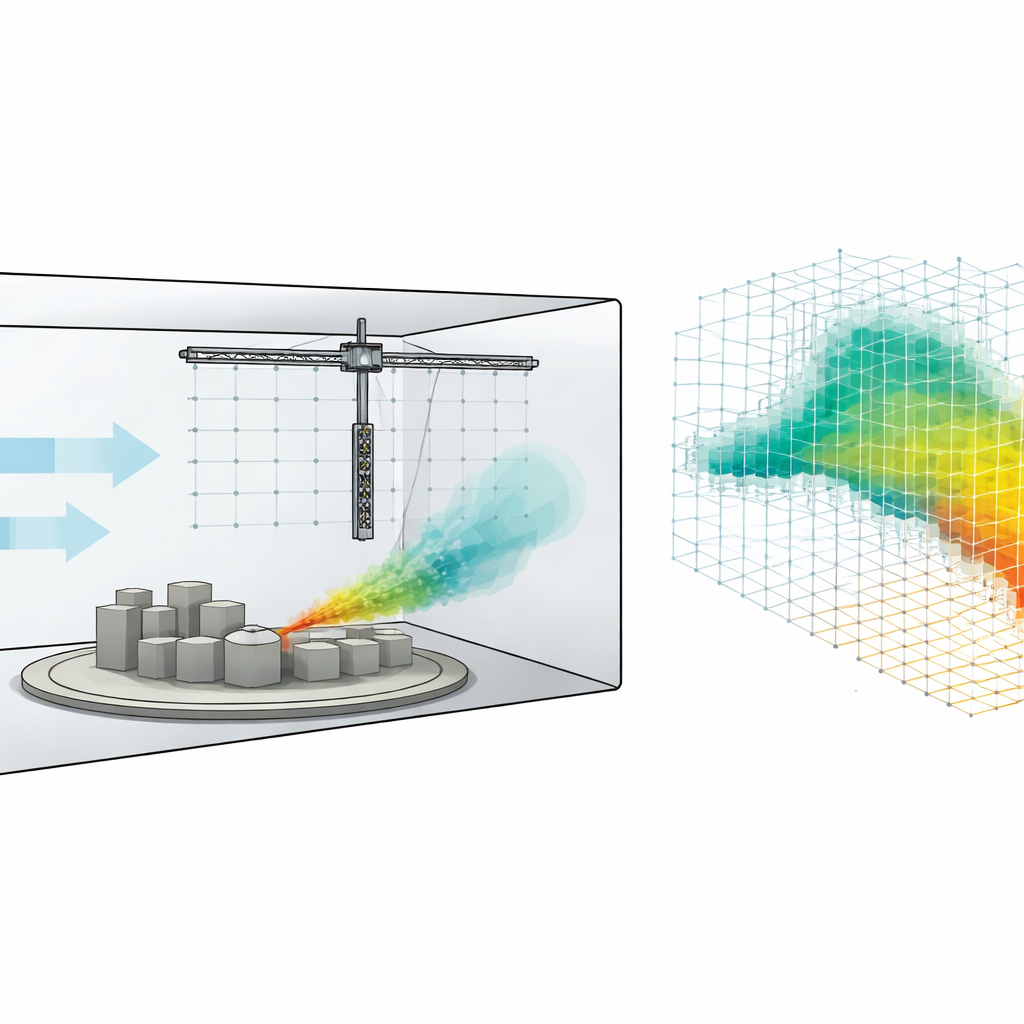
Чтобы изучать эти трудности в контролируемых условиях, команда использовала низкоскоростную аэродинамическую трубу, управляемую немецко-нидерландским объектом Wind Tunnels. Внутри трёхметровой испытательной секции они установили круглый поворотный стол с уменьшенными моделями зданий, резервуаров и дымовых труб, имитирующими промышленное предприятие в масштабе примерно 1:50. Коммерческая машина для генерации тумана под полом подавала специальную смесь по трубке в небольшое отверстие цилиндрического бака, воспроизводя утечку в сосуде хранения. Смесь тумана состояла в основном из пропиленгликоля и триэтиленгликоля с небольшим количеством этанола в качестве легко обнаружимого трассера, формируя видимый паровой шлейф, который также регистрировали газовые сенсоры. Поворачивая стол и меняя скорость ветра, исследователи воссоздавали разные направления ветра и режимы течения — от более упорядоченных потоков до сложных зон за препятствиями с следами и вихрями.
Робоподобный нюхальщик, сканирующий в 3D
Над модельным ландшафтом авторы установили большой программно управляемый портал, действовавший как точная роботизированная рука. С него свисал вертикальный зонд, состоящий из четырёх идентичных сенсорных платформ, расположенных на расстоянии 24 сантиметров друг от друга. Каждая платформа несла недорогие металлооксидные газовые сенсоры, более продвинутый фотоионизационный детектор и небольшие приборы для измерения температуры, влажности, давления и трёхмерной скорости ветра. С субсантиметровой точностью зонд мог перемещаться в точные точки 3D‑сетке, задерживаться достаточно долго для реакции сенсоров, а затем продолжать движение. В восьми «сетовых» экспериментах команда систематически измеряла до 240 × 240 × 96 кубических сантиметров объёма трубы в сотнях точек. В 22 дополнительных «пролётных» прогонках зонд перемещался непрерывно по кривым траекториям, имитируя полёт дрона через шлейф и фиксируя динамическое поднятие и падение сигналов сенсоров при пересечении шлейфа.
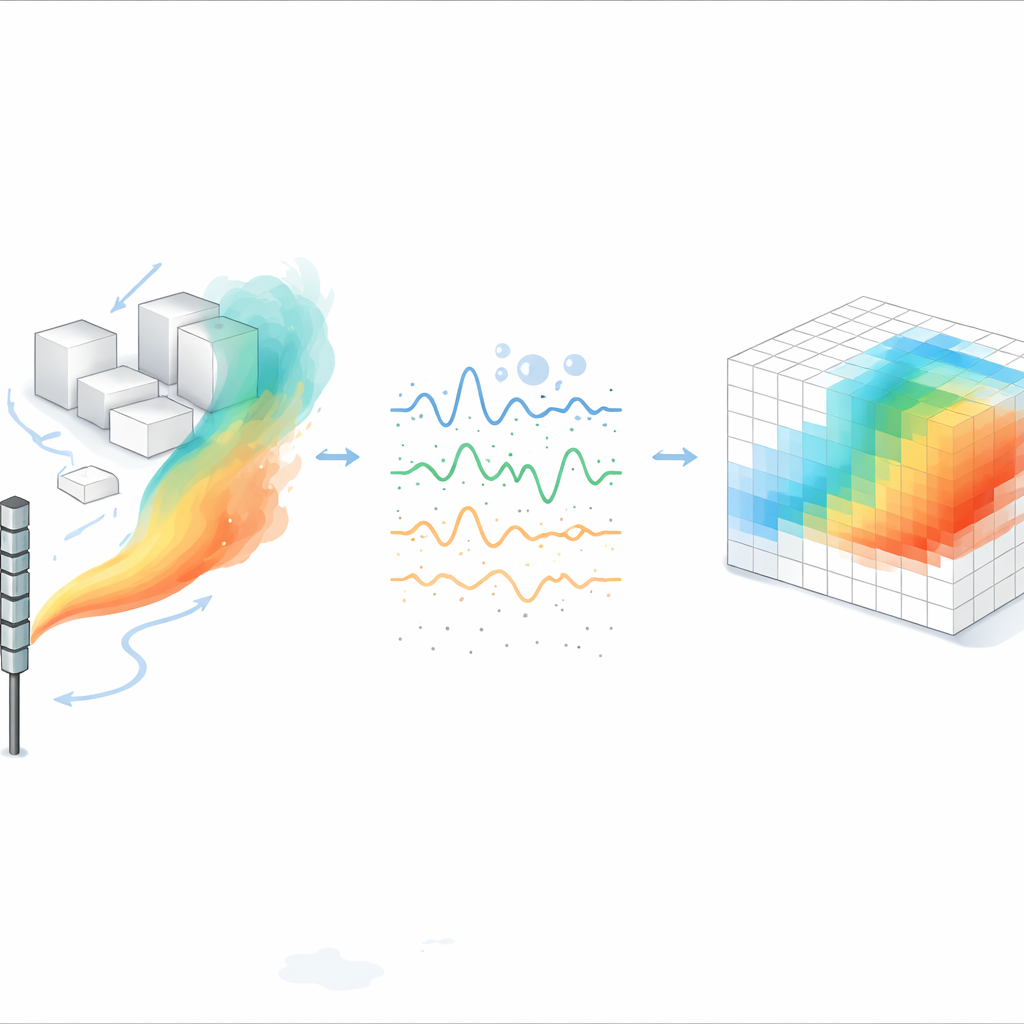
От шумных порывов к чистым 3D‑картам
Сырые выходы сенсоров зависят от множества факторов, помимо концентрации газа: температура и влажность меняют сопротивление металлооксидных сенсоров, флуктуации питания сдвигают показания, а замкнутая труба медленно накапливает фон паров. Поэтому авторы посвятили много усилий аккуратной очистке и преобразованию измерений. Они логировали температуру и влажность вместе с сопротивлением сенсоров, использовали устоявшиеся физические модели для компенсации влияния окружающей среды и переводили отношения показаний сенсоров в значения, похожие на концентрации. Пара фиксированных «восходящих» датчиков в чистом воздухе отслеживала медленно растущий фон, который затем вычитали из всех остальных показаний. Наконец, для сетевых экспериментов они усредняли множество отсчётов в каждой точке в одно значение на величину, превращая объём трубы в трёхмерный массив маленьких кубов (вокселей), в которых хранится уровень газа, вектор ветра и данные об окружении.
Стандартная тестовая площадка для более умных газообнаруживающих роботов
Датасет Red:Vapor превосходит предыдущие коллекции тем, что сочетает высокую пространственную разрешающую способность, полное 3D‑покрытие, реалистичные препятствия и параллельные записи как с дешёвых, так и с дорогих сенсоров — всё это при тщательно контролируемых условиях ветра. Он позволяет исследователям сравнивать, как недорогие металлооксидные сенсоры сопоставимы с быстрыми линейными фотоионизационными детекторами, изучать, сколько времени сенсору нужно задерживаться, чтобы получить осмысленное показание, и тестировать алгоритмы картирования распределения газа и локализации источников. Поскольку доступно всё — от сырых напряжений до предварительно обработанных воксельных карт и 3D‑моделей миниатюрного предприятия, датасет может служить общим эталоном. Для непосвящённого основной вывод таков: это реалистичная «игровая площадка в аэродинамической трубе», где можно разрабатывать, тестировать и справедливо сравнивать новые идеи для газообнаруживающих роботов и моделей шлейфов до их развёртывания на реальных промплощадках или даже на других планетах.
Цитирование: Hinsen, P., Wiedemann, T., Shutin, D. et al. High-Resolution Wind Tunnel Dataset of Gas Sensor Responses to Vapor Plumes in Scale Model Landscapes. Sci Data 13, 586 (2026). https://doi.org/10.1038/s41597-026-06927-8
Ключевые слова: роботизированное газовое обнаружение, эксперименты в аэродинамической трубе, картирование паровых шлейфов, датасет газовых сенсоров, локализация источника