Clear Sky Science · it
Dataset ad alta risoluzione in galleria del vento delle risposte di sensori di gas a pennacchi di vapore in paesaggi in scala
Seguire le tracce invisibili nell’aria
Immaginate di dover rintracciare una fuga di gas o una nube tossica che non potete vedere, usando macchine che possono solo annusare minuscoli campioni di aria a un punto alla volta. Questa è la sfida che affrontano i team che vogliono usare droni e robot per individuare sorgenti d’inquinamento, monitorare siti industriali e perfino esplorare l’atmosfera sottile di altri pianeti. Questo articolo presenta Red:Vapor, un dataset sperimentale dettagliato creato in una grande galleria del vento. Mostra esattamente come una nube di vapore artificiale si attorciglia e si diffonde intorno a un modello in scala di un impianto industriale, e come diversi sensori di gas su una sonda in movimento rispondono mentre attraversano il pennacchio. Il risultato è un ricco banco di prova per scienziati e ingegneri che progettano robot di rilevamento dei gas più intelligenti e modelli migliori del comportamento delle sostanze trasportate dall’aria.
Perché seguire i pennacchi aeriformi è così difficile
I gas e gli aerosol rilasciati nell’aria raramente si allontanano come nuvole lisce e prevedibili. La velocità del vento varia, i flussi diventano turbolenti e edifici e terreno spezzano il moto, creando vortici caotici. Allo stesso tempo, la maggior parte dei sensori chimici si comporta più come un singolo pixel che come una fotocamera: forniscono un solo valore in un punto di spazio e tempo e spesso rispondono lentamente. Ciò significa che i ricercatori devono ricostruire un pennacchio tridimensionale in continua evoluzione a partire da misure molto sparse. Le simulazioni al calcolatore possono aiutare, ma sono costose da eseguire e difficili da verificare rispetto alla realtà, soprattutto quando entrano in gioco anomalie dei sensori come deriva, sensibilità all’umidità o interferenze dovute al flusso d’aria prodotto dal drone.
Costruire un mondo industriale in miniatura in una galleria
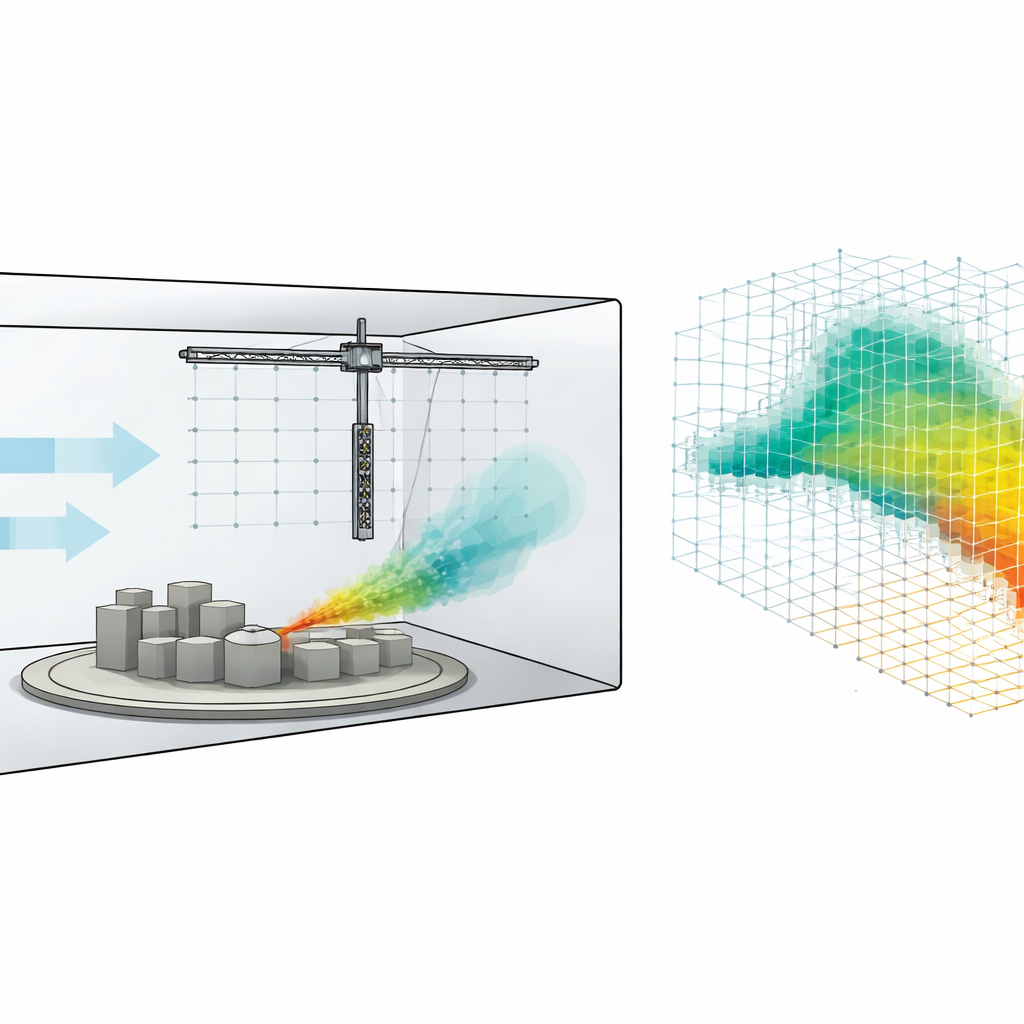
Per affrontare queste difficoltà in modo controllato, il team ha usato una galleria del vento a bassa velocità gestita dalla struttura German‑Dutch Wind Tunnels. All’interno della sezione di prova lunga tre metri hanno montato un tavolo rotante circolare che portava edifici in scala, serbatoi e camini che imitano un impianto industriale in rapporto circa 1:50. Una macchina del fumo commerciale sotto il pavimento alimentava una miscela di nebbia personalizzata attraverso un tubo in una piccola apertura di un serbatoio cilindrico, simulando una perdita da un contenitore di stoccaggio. La miscela di nebbia conteneva principalmente glicole propilenico e trietilenglicole, più una piccola quantità di etanolo come tracciante facilmente rilevabile, formando un pennacchio di vapore visibile e rilevabile anche dai sensori di gas. Ruotando il tavolo e variando la velocità del vento, i ricercatori hanno ricreato diverse direzioni del vento e regimi di flusso, da correnti più ordinate a complesse scie e vortici dietro gli ostacoli.
Un annusatore simile a un robot che scansiona in 3D
Sopra il paesaggio in scala, gli autori hanno installato un grande portale controllato al computer che fungeva da braccio robotico preciso. Appesa a esso c’era una sonda verticale composta da quattro piattaforme sensoriali identiche distanziate di 24 centimetri. Ogni piattaforma ospitava sensori di gas a ossido metallico a basso costo, un più avanzato rivelatore a fotoionizzazione e piccoli strumenti per temperatura, umidità, pressione e velocità del vento tridimensionale. Con precisione sub‑centimetrica la sonda poteva essere portata a punti esatti su una griglia 3D, fermarsi abbastanza a lungo perché i sensori rispondessero e poi spostarsi. In otto esperimenti a "griglia", il team ha campionato sistematicamente fino a 240 × 240 × 96 centimetri cubi di volume della galleria in centinaia di posizioni. In 22 corse aggiuntive di tipo "attraversamento", la sonda si è mossa continuamente lungo traiettorie curve che imitano un drone che vola attraverso un pennacchio, catturando l’innalzamento e l’abbassamento dinamico dei segnali dei sensori mentre si attraversava il pennacchio.
Dai buchi di rumore a mappe 3D pulite
Le uscite grezze dei sensori sono influenzate da molti fattori oltre alla concentrazione di gas: temperatura e umidità possono cambiare la resistenza dei sensori a ossido metallico, sbalzi di tensione possono spostare le letture e la galleria del vento a circuito chiuso accumula lentamente un livello di fondo di vapore. Gli autori quindi hanno dedicato gran parte del lavoro a pulire e trasformare con cura le misure. Registrano temperatura e umidità insieme alla resistenza dei sensori, utilizzano modelli fisici consolidati per compensare gli effetti ambientali e convertono i rapporti dei sensori in valori analoghi alla concentrazione. Una coppia di unità sensoriali fisse "a monte" in aria pulita monitora il lento aumento del fondo, che viene poi sottratto da tutte le altre letture. Infine, per gli esperimenti a griglia, mediando molti campioni in ciascuna posizione ottengono un singolo valore per grandezza, trasformando il volume della galleria in un array 3D di piccoli cubi (voxel) che memorizzano livello di gas, vettore del vento e dati ambientali.
Un banco di prova standard per robot di rilevamento dei gas più intelligenti
Il dataset Red:Vapor va oltre raccolte precedenti combinando alta risoluzione spaziale, copertura 3D completa, ostacoli realistici e registrazioni affiancate sia da sensori economici che di fascia alta, il tutto sotto condizioni di vento attentamente controllate. Consente ai ricercatori di confrontare come i sensori a ossido metallico economici si rapportano a rivelatori a fotoionizzazione veloci e lineari, esplorare quanto a lungo i sensori devono sostare per catturare letture significative e testare algoritmi per mappare distribuzioni di gas e localizzare sorgenti. Poiché è disponibile tutto, dai segnali grezzi alle mappe voxel preprocessate e ai modelli 3D dell’impianto in miniatura, il dataset può fungere da benchmark condiviso. Per un lettore non specialista, la conclusione chiave è che questo lavoro fornisce un "parco giochi" realistico in galleria del vento dove nuove idee per robot annusatori di gas e modelli guidati dai dati possono essere sviluppate, testate e confrontate in modo equo prima di essere impiegate in siti industriali reali o perfino su altri mondi.
Citazione: Hinsen, P., Wiedemann, T., Shutin, D. et al. High-Resolution Wind Tunnel Dataset of Gas Sensor Responses to Vapor Plumes in Scale Model Landscapes. Sci Data 13, 586 (2026). https://doi.org/10.1038/s41597-026-06927-8
Parole chiave: rilevamento robotico di gas, esperimenti in galleria del vento, mappatura di pennacchi di vapore, dataset di sensori di gas, localizzazione della sorgente