Clear Sky Science · ja
縮尺モデル地形における蒸気プルームへのガスセンサー応答を記録した高解像度風洞データセット
目に見えない空気の跡をたどる
目に見えないガス漏れや有毒な雲を、空気の微小サンプルを一点ずつ嗅ぎ分けるだけの機械で追跡することを想像してみてください。ドローンやロボットに汚染源の発見、工場サイトの監視、さらには他の惑星の薄い大気の探査を期待する研究チームが直面する課題はまさにこれです。本稿はRed:Vaporという、大型風洞で作成された詳細な実験データセットを紹介します。縮尺モデルの産業プラントの周りで人工的な蒸気雲がどのようにねじれ拡散するか、そして移動するプローブ上の各種ガスセンサーがプルームを通過する際にどのように応答するかを正確に示したものです。その結果は、より賢いガス検出ロボットや空中物質の挙動モデルを設計する研究者や技術者にとって豊かな検証環境を提供します。
空中プルームを追うのがなぜ難しいのか
空気中に放出されたガスやエアロゾルは、滑らかで予測どおりに漂うことはめったにありません。風速は変動し、流れは乱れ、建物や地形が動きを分断してカオス的な渦を生み出します。同時に、多くの化学センサーはカメラではなく単一画素に近い振る舞いをします:ある時点のある空間位置でしか値を示さず、しかも応答が遅いことが多いのです。つまり、研究者は非常にまばらな測定から三次元で常に変化するプルームを再構築しなければなりません。数値シミュレーションは助けになりますが、計算コストが高く、特にドリフト、湿度感受性、ドローンのダウンウォッシュによる干渉といったセンサー固有の特性が影響する場合には現実との照合が難しくなります。
トンネル内に作られた小さな産業世界
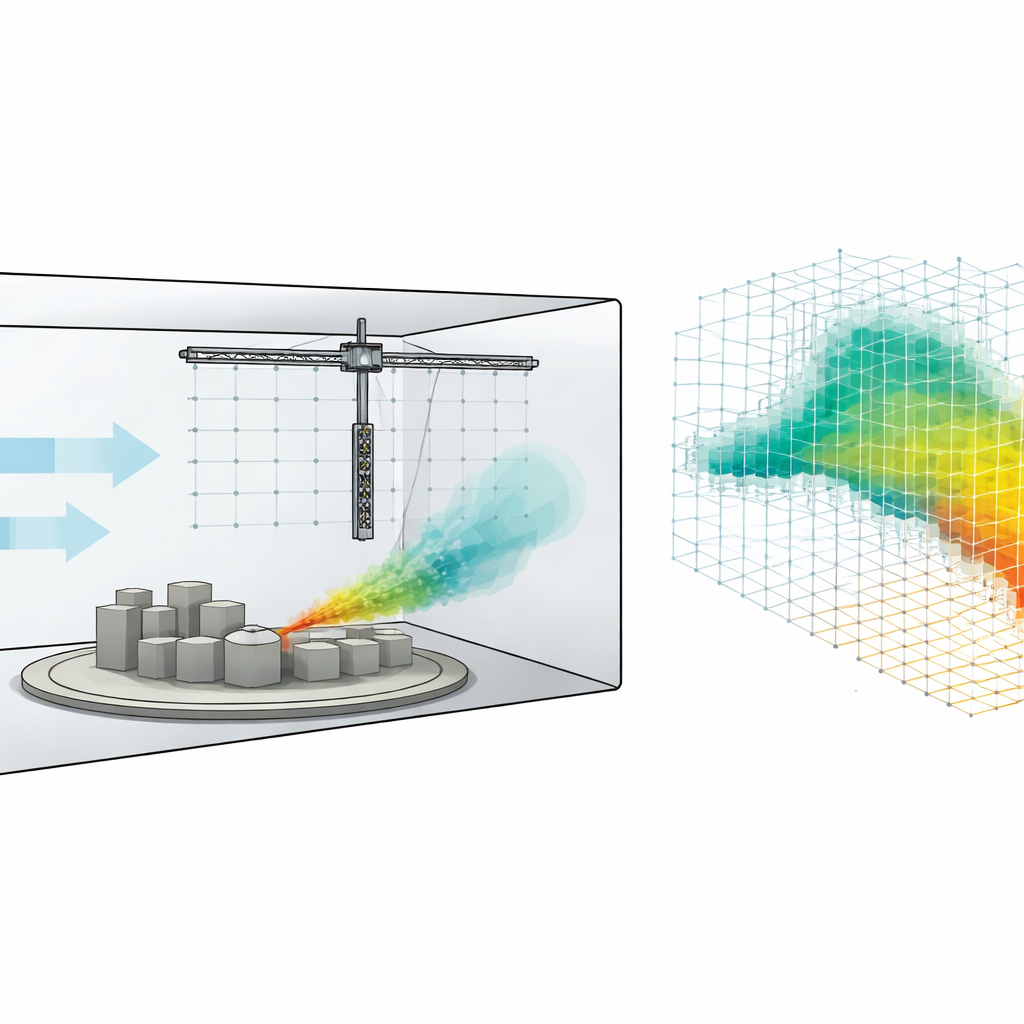
これらの困難を制御された条件で扱うため、研究チームはドイツ・オランダ風洞施設が運用する低速風洞を用いました。全長三メートルの試験区画内には、縮尺模型の建物、タンク、煙突を載せた円形ターンテーブルを設置し、約1:50スケールの産業プラントを再現しました。床下の市販のフォグマシンからのカスタム混合液がチューブを通って円筒タンクの小さな開口に供給され、貯蔵容器の漏れを模擬しました。フォグ混合物は主にプロピレングリコールとトリエチレングリコールを含み、ごく少量のエタノールを検出しやすいトレーサーとして加えられており、目に見える蒸気プルームを形成すると同時にガスセンサーでも検出可能でした。ターンテーブルを回転させ風速を変えることで、研究者らは穏やかな流れから障害物後方の複雑な尾流や渦まで、さまざまな風向きと流れ状態を再現しました。
三次元を走査するロボットのような嗅ぎ取り装置
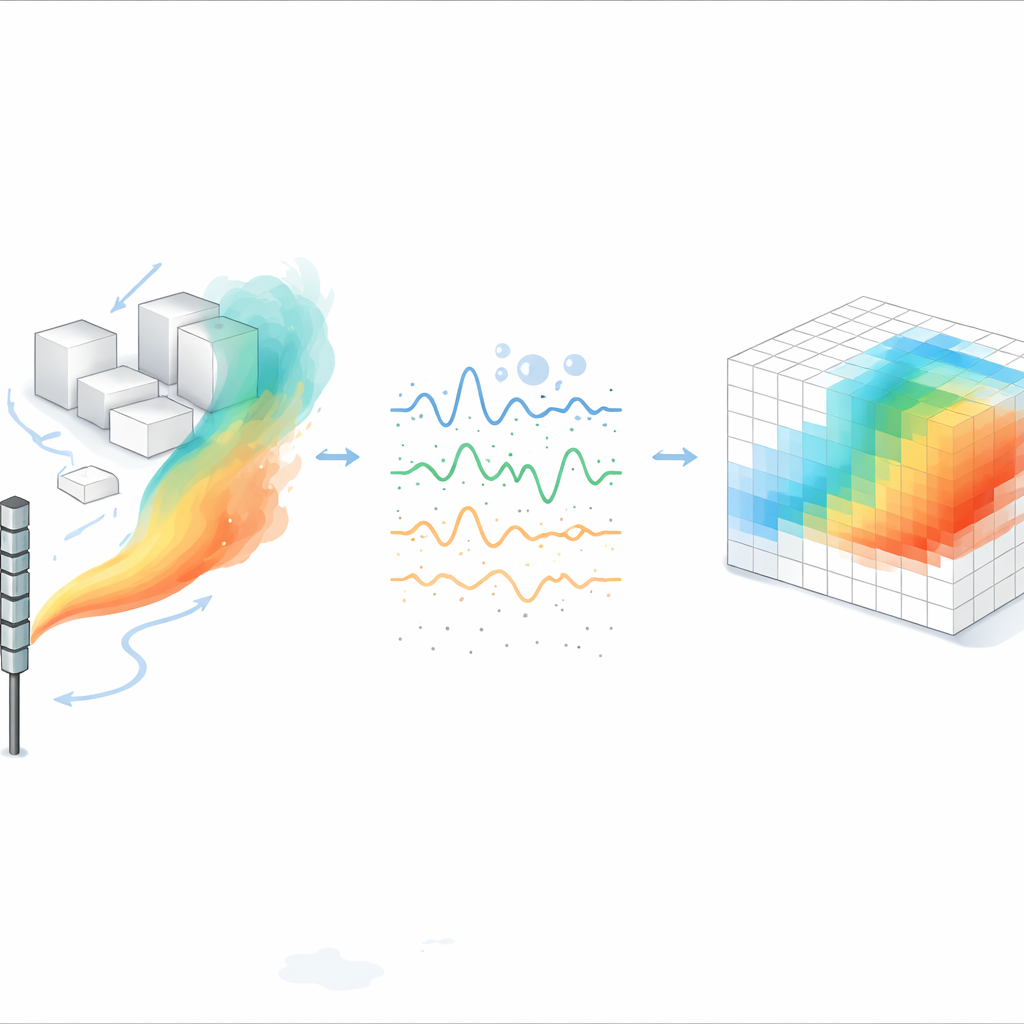
模型群の上には、大型のコンピュータ制御ガントリが設置され、精密なロボットアームのように振る舞いました。そこから垂れ下がった垂直プローブは、24センチ間隔で積み重ねられた4つの同一センサープラットフォームで構成されていました。各プラットフォームは低コストの金属酸化物ガスセンサー、より高速で線形性の高いフォトイオナイゼーション検出器(PID)、および温度・湿度・圧力・三次元風速の小型計測器を備えていました。サブセンチメートルの精度でプローブは3Dグリッド上の正確な点に移動し、センサーが反応するのに十分な時間だけ停止してから次の点へ移動できます。8件の「グリッド」実験では、研究チームは風洞体積の最大240 × 240 × 96立方センチメートルを体系的に数百か所でサンプリングしました。さらに22件の「フライスルー」走行では、プローブはドローンがプルームを横切ることを模した曲線軌道に沿って連続的に移動し、プルーム通過時のセンサー信号の動的な立ち上がりと下降を記録しました。
雑音の多い匂いから得られるクリーンな三次元地図へ
生のセンサー出力はガス濃度以外の多くの要因に影響されます:温度や湿度が金属酸化物センサーの抵抗を変化させ、電源電圧のノイズが測定値をずらし、閉鎖空間の風洞では背景の蒸気レベルが徐々に蓄積します。そこで著者らは測定値の精密なクリーニングと変換に多くの労力を費やしました。彼らは温度と湿度をセンサー抵抗と並行して記録し、環境影響を補正するための既存の物理モデルを用い、センサー比を濃度に類する値へ変換しました。クリーンな空気に置かれた一対の固定「上流」センサー装置がゆっくり上昇する背景を追跡し、それを他のすべての測定から差し引きます。最後に、グリッド実験では各位置で多数のサンプルを平均して各量の単一値にまとめ、トンネル体積をガスレベル、風ベクトル、環境データを格納する小さな立方体(ボクセル)の三次元配列に変換しました。
より賢いガス検知ロボットのための標準的テストベッド
Red:Vaporデータセットは、高い空間分解能、完全な3Dカバレッジ、現実的な障害物、低価格センサーと高性能センサーの並列記録を、厳密に管理された風況下で組み合わせている点で従来のコレクションを超えます。これにより、研究者は安価な金属酸化物センサーが高速で線形なPIDと比べてどのように振る舞うか、意味のある測定を得るためにセンサーがどれだけ長く滞留する必要があるか、ガス分布のマッピングや発生源特定アルゴリズムを評価できます。生の電圧から前処理済みのボクセルマップや縮尺模型の3Dモデルに至るまで全データが公開されているため、このデータセットは共通のベンチマークとして機能します。一般読者にとっての主要な結論は、この研究が新しいガス嗅ぎロボットやデータ駆動のプルームモデルのアイデアを、実際の工業現場や他の世界で展開する前に現実的な「風洞遊び場」で公平に開発・試験・比較できる場を提供していることです。
引用: Hinsen, P., Wiedemann, T., Shutin, D. et al. High-Resolution Wind Tunnel Dataset of Gas Sensor Responses to Vapor Plumes in Scale Model Landscapes. Sci Data 13, 586 (2026). https://doi.org/10.1038/s41597-026-06927-8
キーワード: ロボットによるガス検知, 風洞実験, 蒸気プルームマッピング, ガスセンサーデータセット, 発生源の位置特定