Clear Sky Science · nl
Hoge-resolutie windtunneldataset van gassensorresponsen op damppluimen in schaalmodel-landschappen
Volgen van onzichtbare sporen in de lucht
Stel je voor dat je een gaslek of giftige wolk probeert op te sporen die je niet kunt zien, met apparaten die slechts kleine luchtmonster op één plek tegelijk kunnen ruiken. Dat is de uitdaging voor teams die drones en robots willen inzetten om vervuilingsbronnen te vinden, industriële locaties te monitoren en zelfs de ijle atmosfeer van andere planeten te verkennen. Dit artikel presenteert Red:Vapor, een gedetailleerde experimentele dataset gemaakt in een gigantische windtunnel. Hij toont precies hoe een kunstmatige dampwolk kringelt en zich verspreidt rond een schaalmodel van een industriecomplex, en hoe verschillende gassensoren op een bewegende sonde reageren wanneer ze door de pluim gaan. Het resultaat is een rijk testveld voor wetenschappers en ingenieurs die slimmere gas‑ruikende robots en betere modellen van het gedrag van luchtgedragen stoffen ontwikkelen.
Waarom het volgen van luchtpluimen zo moeilijk is
Gassen en aerosolen die in de lucht worden vrijgegeven waaien zelden weg als soepele, voorspelbare wolken. Windsnelheid fluctueert, stromingen worden turbulent en gebouwen en terrein verstoren de beweging, waardoor chaotische wervelingen ontstaan. Tegelijkertijd gedragen de meeste chemische sensoren zich eerder als één pixel dan als een camera: ze geven slechts één waarde op een punt in ruimte en tijd en reageren vaak traag. Dit betekent dat onderzoekers een driedimensionale, continu veranderende pluim moeten reconstrueren uit zeer spaarzame metingen. Computersimulaties helpen, maar zijn kostbaar om uit te voeren en moeilijk te valideren tegen de werkelijkheid, vooral wanneer sensorquirks zoals drift, gevoeligheid voor luchtvochtigheid of interferentie door downwash van een drone meespeelt.
Een miniatuur industriële wereld bouwen in een tunnel
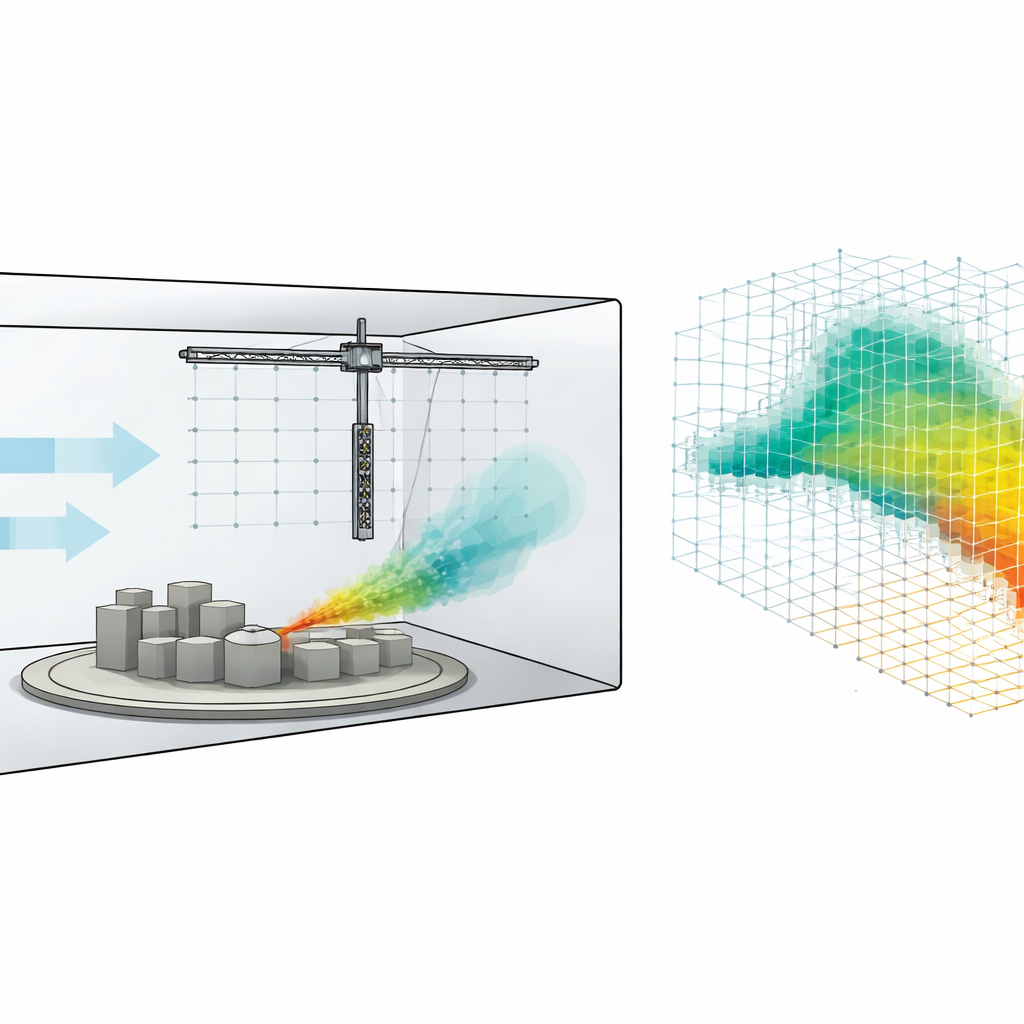
Om deze moeilijkheden op een gecontroleerde manier aan te pakken, gebruikte het team een laag‑snelheids windtunnel van de German‑Dutch Wind Tunnels faciliteit. In de drie meter lange testsectie monteerden ze een circulair draaischijf met schaalmodelgebouwen, tanks en schoorstenen die een industriecomplex nabootsen op ongeveer 1:50 schaal. Een commerciële nevelmachine onder de vloer voerde een aangepaste nevelmix door een buis naar een kleine opening in een cilindrische tank, als simulatie van een lek in een opslagvat. De nevelmix bestond grotendeels uit propyleenglycol en trieenenglycol, plus een kleine hoeveelheid ethanol als gemakkelijk detecteerbare tracer, waardoor een zichtbare damppluim ontstond die ook door gassensoren kon worden gemeten. Door de draaischijf te roteren en de windsnelheid te variëren, recreërden de onderzoekers verschillende windrichtingen en stroomregimes, van meer ordelijke stromen tot complexe wakes en vortices achter obstakels.
Een robotachtige neus die in 3D scant
Boven het modellandschap plaatsten de auteurs een grote computergestuurde portaalarm die fungeerde als een precieze robotarm. Daaraan hing een verticale probe bestaande uit vier identieke sensorplatforms op 24 centimeter afstand van elkaar. Elk platform droeg goedkope metaal‑oxide gassensoren, een geavanceerdere photoionisatiedetector en kleine instrumenten voor temperatuur, luchtvochtigheid, druk en driedimensionale windsnelheid. Met subcentimeter‑nauwkeurigheid kon de probe naar exacte punten in een 3D‑raster worden verplaatst, lang genoeg stilstaan zodat de sensoren konden reageren, en vervolgens doorgaan. In acht "raster"experimenten bemonsterde het team systematisch tot 240 × 240 × 96 kubieke centimeters tunnelvolume op honderden locaties. In 22 aanvullende "doorvlieg" runs bewoog de probe continu langs gebogen paden die een drone die door een pluim vliegt nabootsen, waarbij de dynamische stijging en daling van sensorsignalen tijdens het kruisen van de pluim werden vastgelegd.
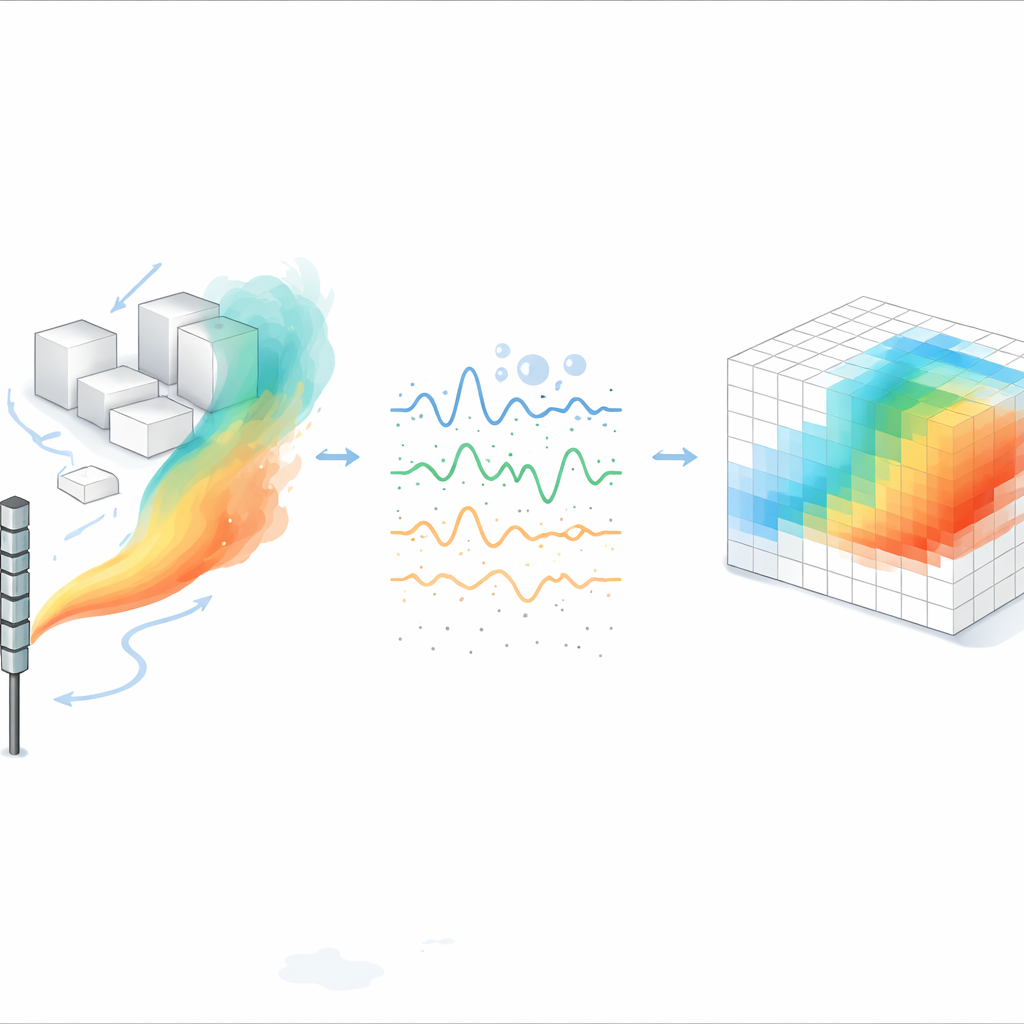
Van rumoerige walm naar zuivere 3D‑kaarten
Ruwe sensoruitgangen worden beïnvloed door vele factoren naast gaskoncentratie: temperatuur en luchtvochtigheid kunnen de weerstand van metaal‑oxide sensoren veranderen, voedingsspanningstoringen kunnen readings verschuiven en de gesloten windtunnel bouwt langzaam een achtergrondniveau van damp op. De auteurs besteedden daarom veel werk aan het zorgvuldig opschonen en transformeren van de metingen. Ze loggen temperatuur en luchtvochtigheid naast sensorweerstand, gebruiken gevestigde fysische modellen om omgevingsinvloeden te compenseren en zetten sensorratio’s om in concentratie‑achtige waarden. Een tweetal vaste "upstream" sensoreenheden in schone lucht volgen de langzaam stijgende achtergrond, die vervolgens van alle andere metingen wordt afgetrokken. Ten slotte middelen ze voor de rasterexperimenten veel monsters op elke locatie tot één enkele waarde per grootheid, waardoor het tunnelvolume verandert in een 3D‑array van kleine blokjes (voxels) die gasniveau, windvector en omgevingsdata opslaan.
Een standaard testomgeving voor slimmere gas‑ruikende robots
De Red:Vapor dataset gaat verder dan eerdere verzamelingen door hoge ruimtelijke resolutie, volledige 3D‑dekking, realistische obstakels en gelijktijdige opnames van zowel goedkope als hoogwaardige sensoren te combineren, alles onder zorgvuldig gecontroleerde windcondities. Hij stelt onderzoekers in staat te vergelijken hoe goedkope metaal‑oxide sensoren zich verhouden tot snelle, lineaire photoionisatiedetectoren, te onderzoeken hoe lang sensoren moeten verblijven om zinvolle metingen vast te leggen, en algoritmes te testen voor het in kaart brengen van gasverdelingen en het lokaliseren van bronnen. Omdat alles van ruwe spanningen tot voorbewerkte voxelkaarten en 3D‑modellen van het miniatuurcomplex openbaar beschikbaar is, kan de dataset dienen als een gedeelde benchmark. Voor een leek is de belangrijkste conclusie dat dit werk een realistische "windtunnel‑speelplaats" biedt waar nieuwe ideeën voor gassnuffelende robots en datagedreven pluimmodellen ontwikkeld, getest en eerlijk vergeleken kunnen worden voordat ze op echte industriële locaties of zelfs op andere werelden worden ingezet.
Bronvermelding: Hinsen, P., Wiedemann, T., Shutin, D. et al. High-Resolution Wind Tunnel Dataset of Gas Sensor Responses to Vapor Plumes in Scale Model Landscapes. Sci Data 13, 586 (2026). https://doi.org/10.1038/s41597-026-06927-8
Trefwoorden: robotische gassensing, windtunnelexperimenten, damppluimmapping, gassensordataset, bronlokalisatie