Clear Sky Science · de
Hochauflösender Windkanal‑Datensatz von Gassensorantworten auf Dampfschleier in maßstabsgetreuen Modelllandschaften
Den unsichtbaren Spuren in der Luft folgen
Stellen Sie sich vor, Sie müssten ein Gasleck oder eine giftige Wolke aufspüren, die Sie nicht sehen können, und dabei Maschinen verwenden, die nur winzige Luftproben an einzelnen Punkten „riechen“ können. Das ist die Herausforderung für Teams, die Drohnen und Roboter einsetzen wollen, um Schadstoffquellen zu finden, Industrieanlagen zu überwachen oder sogar die dünne Atmosphäre anderer Planeten zu erkunden. Dieser Artikel stellt Red:Vapor vor, einen detaillierten experimentellen Datensatz, der in einem großen Windkanal erstellt wurde. Er zeigt genau, wie sich eine künstliche Dampfwolke um ein maßstabsgetreues Industrieanlagen‑Modell windet und ausbreitet und wie verschiedene Gassensoren auf einer bewegten Sonde reagieren, wenn sie den Schleier durchqueren. Das Ergebnis ist ein reichhaltiges Testfeld für Wissenschaftler und Ingenieure, die intelligentere gasmessende Roboter und bessere Modelle für das Verhalten luftgetragener Substanzen entwickeln.
Warum das Verfolgen von luftgetragenen Schleiern so schwierig ist
Gase und Aerosole, die in die Luft gelangen, treiben selten als glatte, vorhersehbare Wolken davon. Die Windgeschwindigkeit schwankt, Strömungen werden turbulent, und Gebäude sowie Gelände unterbrechen die Bewegung und erzeugen chaotische Wirbel. Gleichzeitig verhalten sich die meisten chemischen Sensoren eher wie ein einzelnes Pixel als wie eine Kamera: Sie liefern nur einen Wert an einem Punkt in Raum und Zeit und reagieren oft langsam. Das bedeutet, dass Forschende aus sehr spärlichen Messungen eine dreidimensionale, sich ständig verändernde Wolke rekonstruieren müssen. Computersimulationen können helfen, sind aber rechenaufwändig und schwer mit der Realität abzugleichen, insbesondere wenn Sensor‑Eigenheiten wie Drift, Feuchtigkeitsempfindlichkeit oder Störeinflüsse durch den Abwind von Drohnen ins Spiel kommen.
Eine Miniatur‑Industriewelt im Tunnel bauen
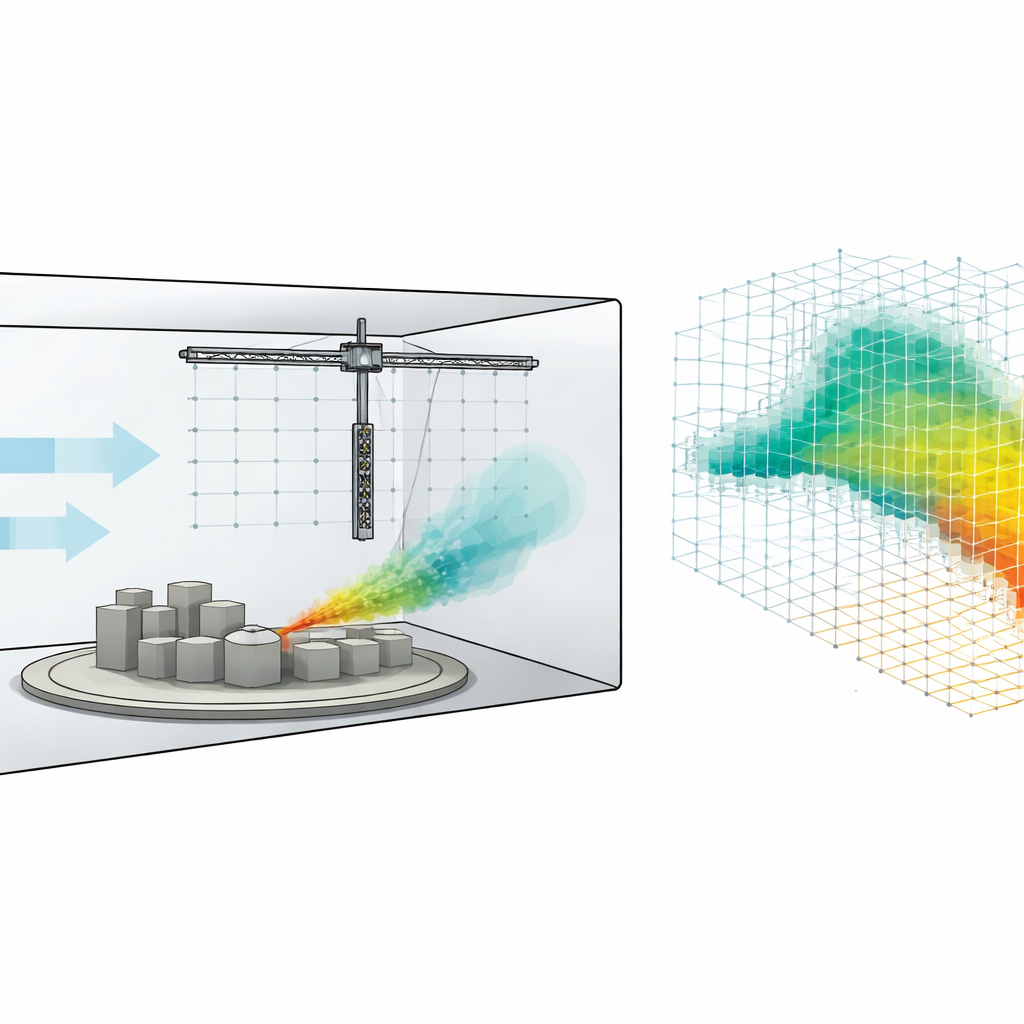
Um diese Schwierigkeiten kontrolliert anzugehen, nutzte das Team einen Tieftemperatur‑Windkanal der German‑Dutch Wind Tunnels‑Einrichtung. Innerhalb des drei Meter langen Prüfabschnitts montierten sie einen runden Drehteller mit maßstabsgetreuen Gebäuden, Tanks und Schornsteinen, die eine Industrieanlage in etwa 1:50 nachbilden. Eine handelsübliche Nebelmaschine unter dem Boden speiste eine kundenspezifische Nebelmischung durch ein Rohr in eine kleine Öffnung eines zylindrischen Tanks und simulierte so ein Leck an einem Lagerbehälter. Die Nebelmischung bestand hauptsächlich aus Propylenglykol und Triethylenglykol sowie einer kleinen Menge Ethanol als leicht nachweisbarem Tracer, wodurch ein sichtbarer Dampfschleier entstand, der auch von Gassensoren detektiert werden konnte. Durch Rotation des Drehtellers und Veränderung der Windgeschwindigkeit rekonstruierten die Forschenden unterschiedliche Windrichtungen und Strömungsregime – von geordneten Strömen bis zu komplexen Abwinden und Wirbeln hinter Hindernissen.
Ein robotergleicher Schnüffler, der in 3D abtastet
Über der Modelllandschaft installierten die Autorinnen und Autoren einen großflächigen, computergesteuerten Portalroboter, der wie ein präziser Roboterarm fungierte. An ihm hing eine vertikale Sonde, bestehend aus vier identischen Sensormodulen im Abstand von 24 Zentimetern. Jedes Modul trug preiswerte Metall‑Oxid‑Gassensoren, einen leistungsfähigeren Photoionisationsdetektor sowie kleine Instrumente für Temperatur, Luftfeuchte, Druck und dreidimensionale Windgeschwindigkeit. Mit subzentimetergenauer Genauigkeit konnte die Sonde an exakte Punkte eines 3D‑Rasters bewegt werden, lange genug verweilen, damit die Sensoren reagieren, und dann weiterfahren. In acht „Raster“-Experimenten probte das Team systematisch Volumen von bis zu 240 × 240 × 96 Kubikzentimetern des Tunnelraums an Hunderten von Stellen. In 22 zusätzlichen „Durchflugs“-Durchläufen bewegte sich die Sonde kontinuierlich entlang gekrümmter Bahnen, die einen Drohnenflug durch einen Schleier nachahmen, und erfasste das dynamische Ansteigen und Abfallen der Sensorsignale beim Durchqueren des Schleiers.
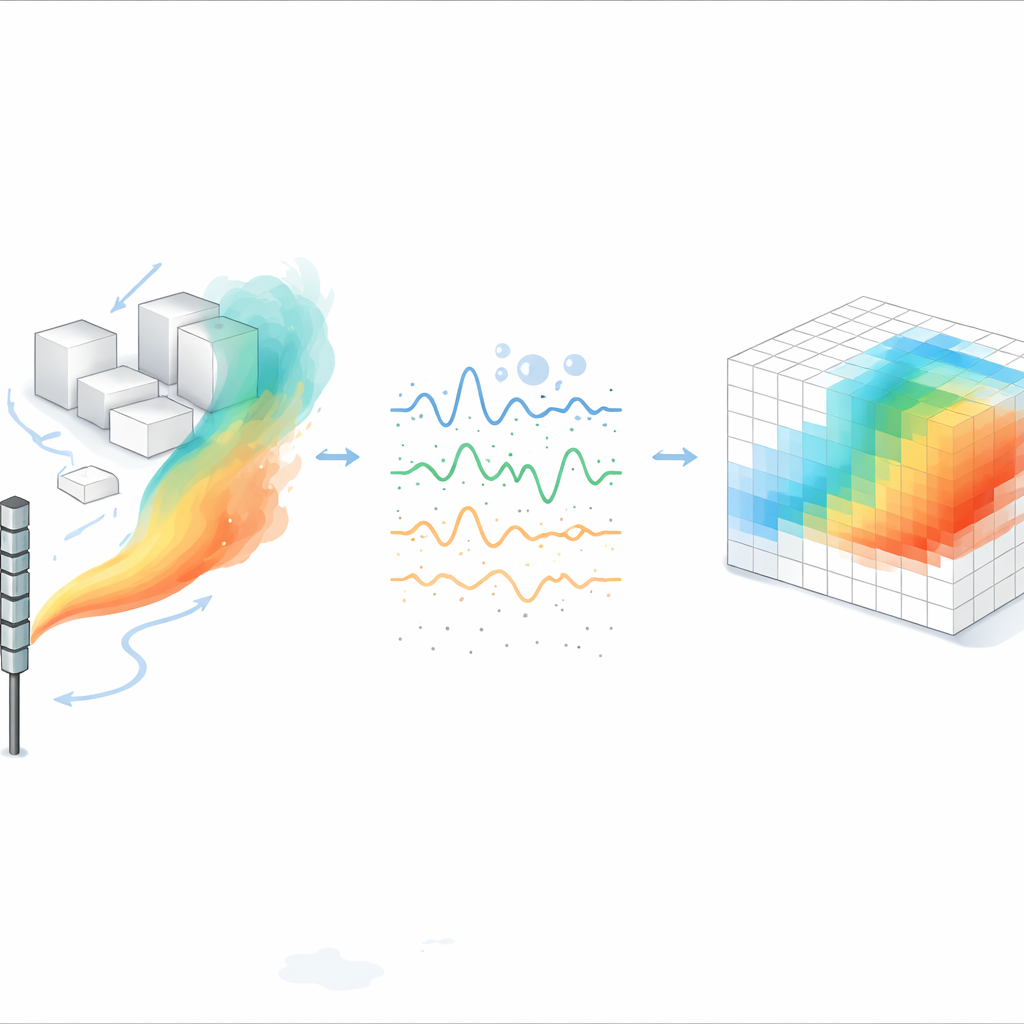
Von verrauschten Wölkchen zu sauberen 3D‑Karten
Rohdaten der Sensoren werden von vielen Faktoren beeinflusst, die über die Gaskonzentration hinausgehen: Temperatur und Luftfeuchte verändern den Widerstand von Metall‑Oxid‑Sensoren, Versorgungsspannungsstörungen können Messwerte verschieben, und der geschlossene Windkanal baut langsam einen Hintergrundpegel an Dampf auf. Daher widmeten die Autorinnen und Autoren einen großen Teil ihrer Arbeit der sorgfältigen Reinigung und Transformation der Messdaten. Sie protokollieren Temperatur und Feuchte neben dem Sensorwiderstand, nutzen etablierte physikalische Modelle zur Kompensation von Umwelteinflüssen und wandeln Sensorverhältnisse in konzentrationsähnliche Werte um. Ein Paar stationärer „stromaufwärts“ platzierter Einheiten in sauberer Luft verfolgt den langsam ansteigenden Hintergrund, der anschließend von allen anderen Messwerten subtrahiert wird. Schließlich mitteln sie für die Rasterexperimente viele Proben an jedem Ort zu einem einzigen Wert pro Messgröße, wodurch das Tunnelvolumen in ein 3D‑Array kleiner Würfel (Voxel) umgewandelt wird, die Gaspegel, Windvektor und Umweltdaten speichern.
Ein standardisiertes Testfeld für intelligentere gasmessende Roboter
Der Red:Vapor‑Datensatz geht über frühere Sammlungen hinaus, indem er hohe räumliche Auflösung, vollständige 3D‑Abdeckung, realistische Hindernisse und parallele Aufzeichnungen sowohl preiswerter als auch hochwertiger Sensoren unter sorgfältig überwachten Windbedingungen kombiniert. Er ermöglicht Forschenden, zu vergleichen, wie sich günstige Metall‑Oxid‑Sensoren gegenüber schnellen, linearen Photoionisationsdetektoren schlagen, zu erforschen, wie lange Sensoren verweilen müssen, um aussagekräftige Messungen zu erhalten, und Algorithmen zur Kartierung von Gasverteilungen und zur Lokalisierung von Quellen zu testen. Da alles von Rohspannungen bis zu vorverarbeiteten Voxel‑Karten und 3D‑Modellen der Miniaturanlage offen verfügbar ist, kann der Datensatz als gemeinsamer Benchmark dienen. Für Laien ist die wichtigste Schlussfolgerung, dass diese Arbeit einen realistischen „Windkanal‑Spielplatz“ bietet, auf dem neue Ideen für gasmessende Roboter und datengetriebene Schleiermodelle entwickelt, getestet und fair verglichen werden können, bevor sie in realen Industrieanlagen oder sogar auf anderen Welten eingesetzt werden.
Zitation: Hinsen, P., Wiedemann, T., Shutin, D. et al. High-Resolution Wind Tunnel Dataset of Gas Sensor Responses to Vapor Plumes in Scale Model Landscapes. Sci Data 13, 586 (2026). https://doi.org/10.1038/s41597-026-06927-8
Schlüsselwörter: robotisches Gasserkennen, Windkanalexperimente, Kartierung von Dampfschleiern, Gassensor‑Datensatz, Quellenlokalisierung