Clear Sky Science · sv
Högupplöst vindkanalsdataset med gasgivarsvar på ångstrimmor i modellerade landskap
Följa osynliga spår i luften
Föreställ dig att du försöker lokalisera ett gasutsläpp eller ett giftmoln du inte kan se, med hjälp av maskiner som bara kan nosa på små luftprover en punkt i taget. Det är utmaningen för team som vill att drönare och robotar ska hjälpa till att hitta föroreningskällor, övervaka industrimiljöer och till och med utforska den tunna atmosfären på andra planeter. Denna artikel presenterar Red:Vapor, ett detaljerat experimentellt dataset skapat i en jättelik vindkanal. Det visar exakt hur en konstgjord ångmoln vrider sig och sprider sig runt en skalmodell av en industrianläggning, och hur olika gassensorer på en rörlig sond reagerar när de passerar genom strimmen. Resultatet är en rik testmiljö för forskare och ingenjörer som utvecklar smartare gassökande robotar och bättre modeller för hur luftburna ämnen beter sig.
Varför det är så svårt att följa luftburna strimmor
Gaser och aerosoler som släpps ut i luften driver sällan bort som jämna, förutsägbara moln. Vindhastigheten varierar, flöden blir turbulenta och byggnader och terräng bryter upp rörelsen och skapar kaotiska virvlar. Samtidigt beter sig de flesta kemiska sensorer mer som en enskild pixel än som en kamera: de ger bara ett värde vid en punkt i rum och tid och svarar ofta långsamt. Det innebär att forskare måste rekonstruera en tredimensionell, ständigt föränderlig strimma från mycket glest fördelade mätningar. Datorsimuleringar kan hjälpa, men de är dyra att köra och svåra att verifiera mot verkligheten, särskilt när sensorspecifika egenskaper som drift, känslighet för fukt eller störningar från drönarens nedåtvind påverkar mätningarna.
Bygga en miniatyr industrivärld i en tunnel
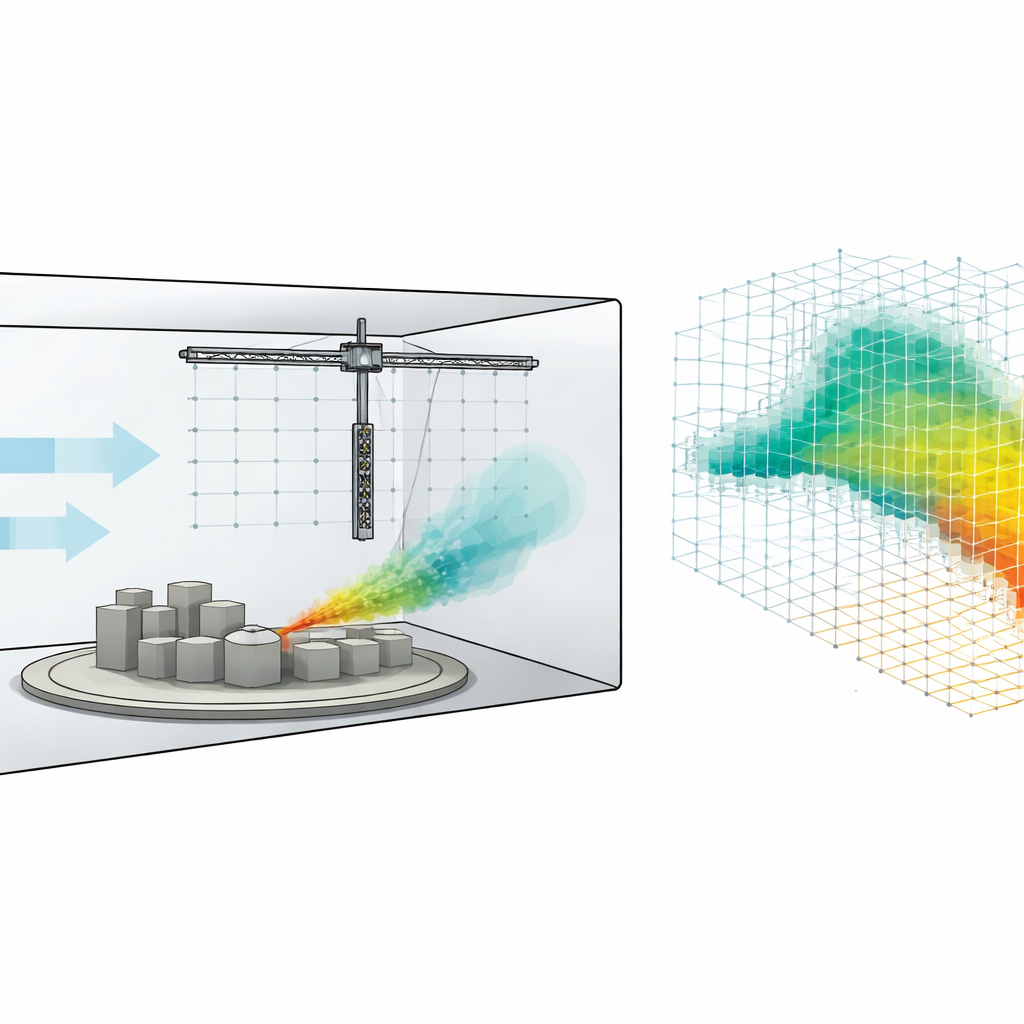
För att ta itu med dessa svårigheter på ett kontrollerat sätt använde teamet en låghastighets vindkanal som drivs av German‑Dutch Wind Tunnels‑anläggningen. Inne i dess tre meter långa testsektion monterade de en cirkulär vändplatta med skalmodeller av byggnader, tankar och skorstenar som efterliknar en industrianläggning i ungefär 1:50 skala. En kommersiell dimmaskin under golvet förde in en specialblandning genom ett rör in i en liten öppning i en cylindrisk tank, vilket efterliknade ett läckage i en lagringsbehållare. Dimblandningen bestod till största delen av propylenglykol och trietylenglykol, plus en liten mängd etanol som en lättupptäckt spårsubstans, vilket bildade en synlig ångstrimma som också kunde detekteras av gassensorer. Genom att rotera vändplattan och variera vindhastigheten återskapade forskarna olika vindriktningar och flödesregimer, från mer ordnade strömmar till komplexa bakvindar och virvlar bakom hinder.
En robotlik nos som skannar i 3D
Över modellandskapet installerade författarna ett stort datorstyrt gantry som fungerade som en precis robotarm. Från det hängde en vertikal sond bestående av fyra identiska sensorplattformar staplade med 24 centimeters mellanrum. Varje plattform bar lågkostnadssensorer av metalloxid, en mer avancerad fotjonisationsdetektor och små instrument för temperatur, luftfuktighet, tryck och tredimensionell vindhastighet. Med subcentimeterprecision kunde sonden förflyttas till exakta punkter i ett 3D‑gitter, pausa tillräckligt länge för att sensorerna skulle reagera och sedan fortsätta. I åtta ”gitter”‑experiment provtog teamet systematiskt upp till 240 × 240 × 96 kubikcentimeter av tunneln vid hundratals platser. I ytterligare 22 ”genomflygnings”‑körningar rörde sig sonden kontinuerligt längs kurviga banor som imiterar en drönare som flyger genom en strimma, och fångade de dynamiska upp- och nedgångarna i sensorsignaler när strimman korsades.
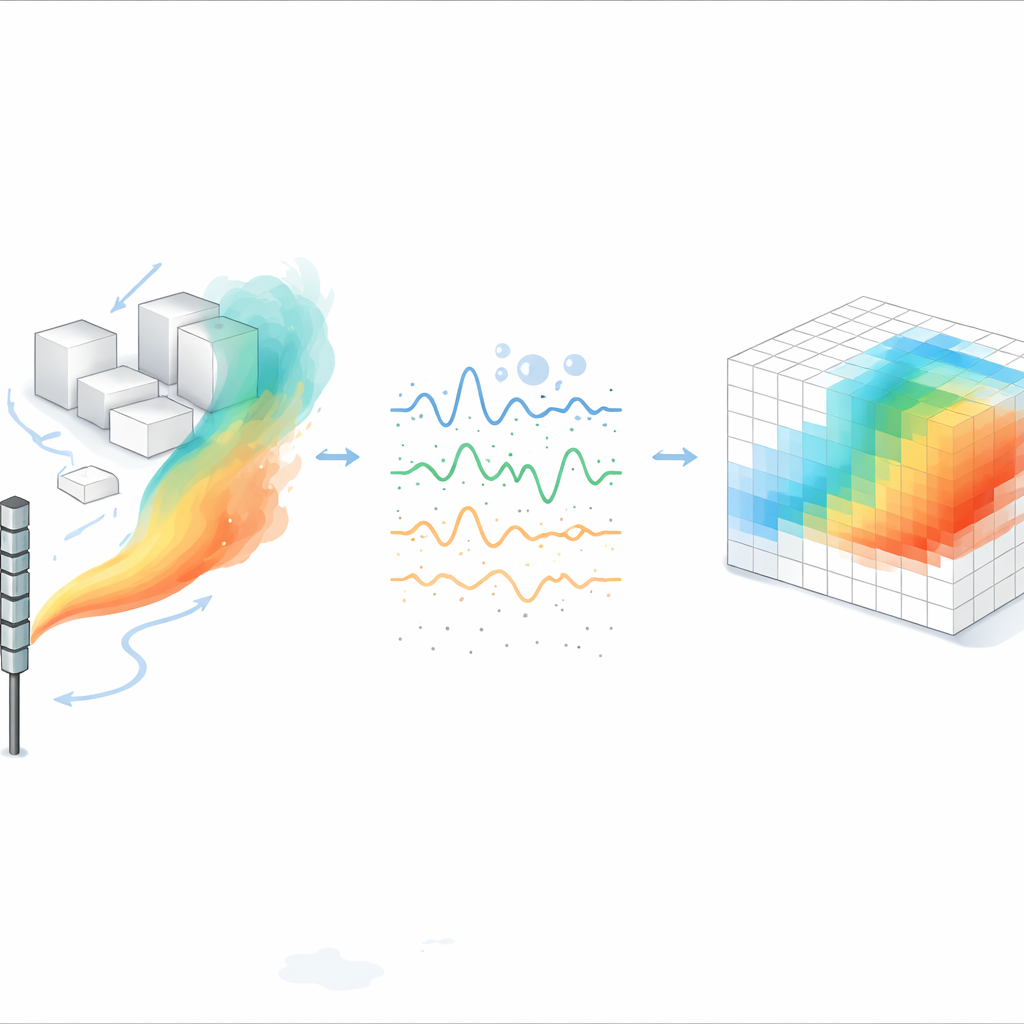
Från brusiga viftningar till rena 3D‑kartor
Råa sensorutgångar påverkas av många faktorer utöver gaskoncentration: temperatur och luftfuktighet kan ändra metalloxidsensorernas resistans, spänningsbrytningar kan förskjuta avläsningar och den slutna vindkanalen bygger långsamt upp en bakgrundsnivå av ånga. Författarna ägnade därför en stor del av arbetet åt noggrann rengöring och omvandling av mätningarna. De loggar temperatur och luftfuktighet tillsammans med sensorresistans, använder etablerade fysikaliska modeller för att kompensera för miljöfaktorer och omvandlar sensorratioer till koncentrationsliknande värden. Ett par fasta ”uppströms” sensorenheter i ren luft följer den långsamt stigande bakgrunden, vilken sedan subtraheras från alla andra avläsningar. Slutligen, för gitterexperimenten, medelvärdesbildar de många prov på varje plats till ett enda värde per mätstorhet, vilket förvandlar tunnelvolymen till en 3D‑array av små kuber (voxlar) som lagrar gasnivå, vindvektor och miljödata.
En standardiserad testbädd för smartare gassökande robotar
Red:Vapor‑datasetet går längre än tidigare samlingar genom att kombinera hög rumslig upplösning, full 3D‑täckning, realistiska hinder och samtidiga inspelningar från både billigare och mer avancerade sensorer, allt under noggrant övervakade vindförhållanden. Det låter forskare jämföra hur billig metalloxidteknik står sig mot snabba, linjära fotjonisationsdetektorer, undersöka hur länge sensorer måste stanna för att få meningsfulla avläsningar och testa algoritmer för att kartlägga gasfördelningar och lokalisera källor. Eftersom allt från råa spänningsvärden till förbehandlade voxelkartor och 3D‑modeller av miniatyranläggningen är öppet tillgängligt, kan datasetet fungera som en gemensam referens. För en lekman är huvudbudskapet att detta arbete erbjuder en realistisk ”vindkanalsandlåda” där nya idéer för gasnösande robotar och datadrivna strimmemodeller kan utvecklas, testas och jämföras rättvist innan de tas i bruk på riktiga industrimiljöer eller till och med på andra världar.
Citering: Hinsen, P., Wiedemann, T., Shutin, D. et al. High-Resolution Wind Tunnel Dataset of Gas Sensor Responses to Vapor Plumes in Scale Model Landscapes. Sci Data 13, 586 (2026). https://doi.org/10.1038/s41597-026-06927-8
Nyckelord: robotisk gassökning, vindkanalexperiment, kartläggning av ångstrimmor, dataset för gasgivare, källokalisation