Clear Sky Science · es
Conjunto de datos de alta resolución en túnel de viento de respuestas de sensores de gas a penachos de vapor en paisajes a escala
Siguiendo rastros invisibles en el aire
Imagínese intentar localizar una fuga de gas o una nube tóxica que no puede ver, usando máquinas que solo pueden olfatear pequeñas muestras de aire en un punto a la vez. Ese es el reto que afrontan los equipos que quieren que drones y robots ayuden a encontrar fuentes de contaminación, vigilar instalaciones industriales e incluso explorar la tenue atmósfera de otros planetas. Este artículo presenta Red:Vapor, un conjunto de datos experimentales detallado creado en un túnel de viento gigante. Muestra exactamente cómo una nube de vapor artificial se retuerce y se dispersa alrededor de una maqueta a escala de una planta industrial, y cómo diferentes sensores de gas en una sonda móvil responden al atravesar el penacho. El resultado es un banco de pruebas rico para científicos e ingenieros que diseñan robots con mejor detección de gases y modelos más precisos del comportamiento de sustancias en el aire.
Por qué es tan difícil rastrear penachos en el aire
Los gases y los aerosoles liberados al aire rara vez se desplazan como nubes suaves y predecibles. La velocidad del viento fluctúa, los flujos se vuelven turbulentos y los edificios y el terreno fragmentan el movimiento, creando remolinos caóticos. Al mismo tiempo, la mayoría de los sensores químicos se comportan más como un único píxel que como una cámara: solo ofrecen un valor en un punto del espacio y del tiempo, y a menudo responden con lentitud. Esto obliga a los investigadores a reconstruir un penacho tridimensional y en constante cambio a partir de mediciones muy dispersas. Las simulaciones por ordenador pueden ayudar, pero son costosas de ejecutar y difíciles de validar frente a la realidad, especialmente cuando aparecen efectos propios de los sensores como deriva, sensibilidad a la humedad o interferencias provocadas por la estela descendente de un dron.
Construir un mundo industrial en miniatura dentro de un túnel
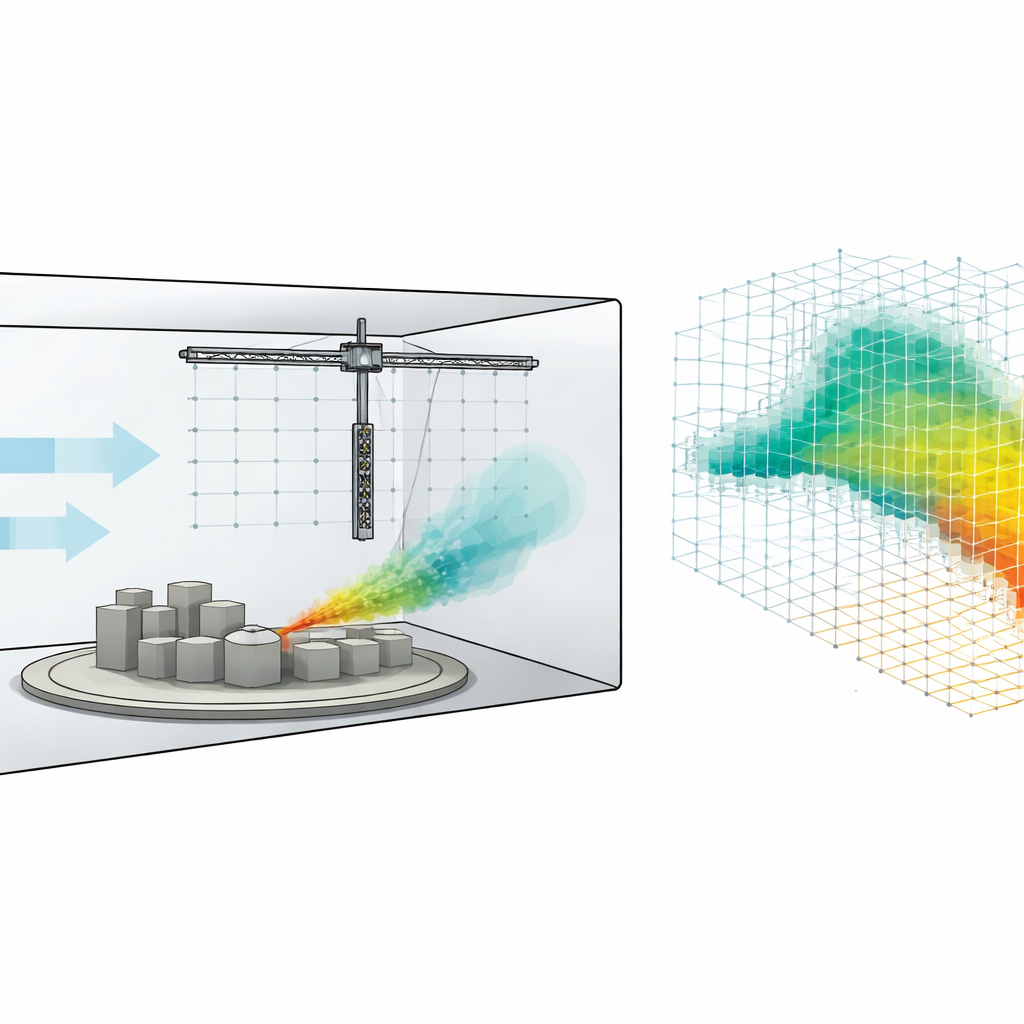
Para abordar estas dificultades de manera controlada, el equipo utilizó un túnel de viento de baja velocidad operado por la instalación German‑Dutch Wind Tunnels. Dentro de su sección de ensayo de tres metros de longitud montaron una plataforma circular que llevaba maquetas de edificios, tanques y chimeneas a escala que imitan una planta industrial a aproximadamente 1:50. Una máquina de humo comercial bajo el suelo alimentó una mezcla de niebla personalizada mediante un tubo hacia una pequeña apertura en un tanque cilíndrico, emulando una fuga en un recipiente de almacenamiento. La mezcla de niebla contenía principalmente propilenglicol y trietilenglicol, además de una pequeña cantidad de etanol como trazador fácilmente detectable, formando un penacho de vapor visible que también era detectable por sensores de gas. Al rotar la plataforma y cambiar la velocidad del viento, los investigadores recrearon distintas direcciones del viento y regímenes de flujo, desde corrientes más ordenadas hasta estelas complejas y vórtices detrás de los obstáculos.
Un olfateador tipo robot que explora en 3D
Sobre el paisaje a escala, los autores instalaron un gran pórtico controlado por ordenador que actuaba como un brazo robótico preciso. Suspendida del pórtico había una sonda vertical compuesta por cuatro plataformas de sensores idénticas separadas 24 centímetros entre sí. Cada plataforma llevaba sensores de óxido metálico de bajo coste, un detector por fotoionización más avanzado y pequeños instrumentos para medir temperatura, humedad, presión y la velocidad del viento en tres dimensiones. Con precisión subcentimétrica, la sonda podía moverse a puntos exactos en una cuadrícula 3D, detenerse el tiempo suficiente para que los sensores reaccionaran y luego continuar. En ocho experimentos de “rejilla” el equipo muestreó sistemáticamente hasta 240 × 240 × 96 centímetros cúbicos del volumen del túnel en cientos de ubicaciones. En 22 ejecuciones adicionales de “atravesado” la sonda se movió de forma continua a lo largo de trayectorias curvas que imitan a un dron volando a través de un penacho, capturando el ascenso y descenso dinámico de las señales de los sensores al cruzar la nube.
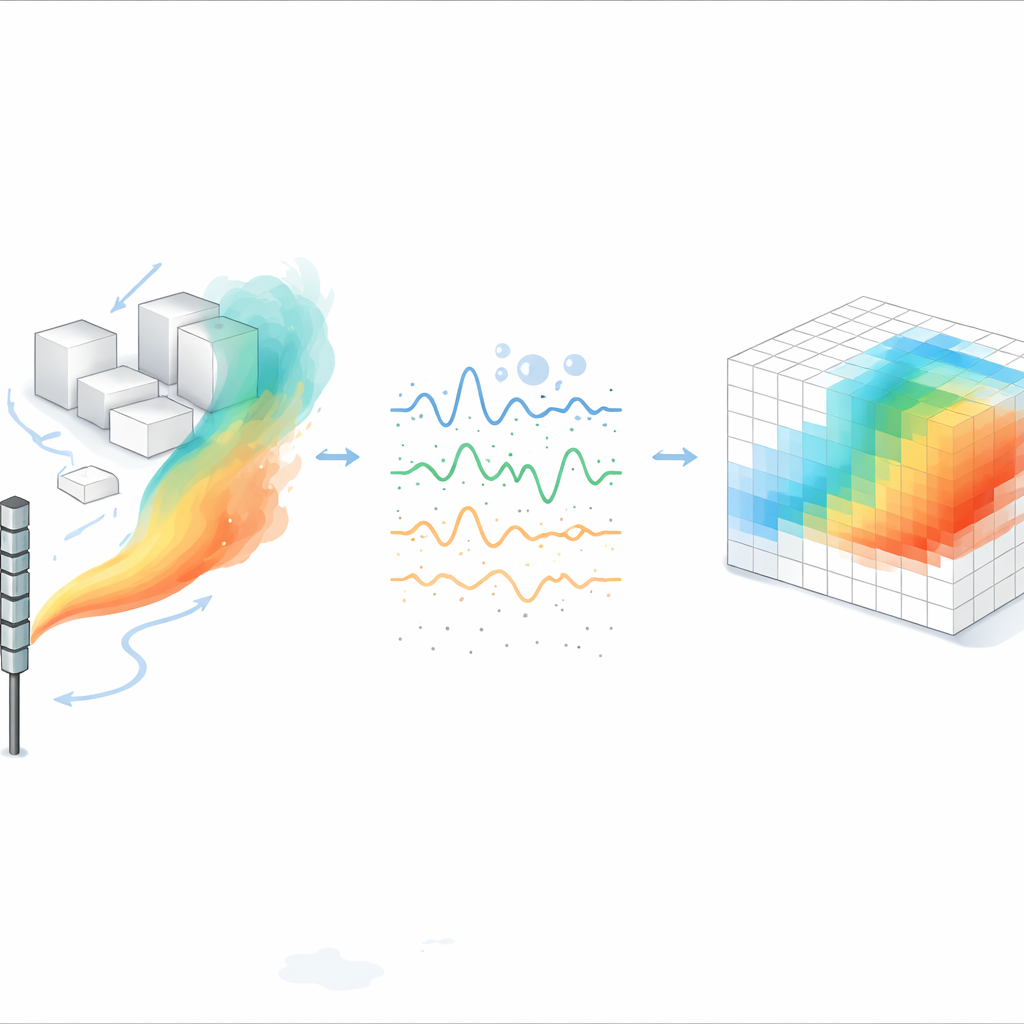
De bocanadas ruidosas a mapas 3D limpios
Las salidas crudas de los sensores se ven afectadas por muchos factores más allá de la concentración de gas: la temperatura y la humedad pueden cambiar la resistencia de los sensores de óxido metálico, las fluctuaciones de la tensión de alimentación pueden desplazar las lecturas y el túnel de viento en circuito cerrado acumula lentamente un nivel de fondo de vapor. Por ello, los autores dedicaron gran parte de su trabajo a limpiar y transformar cuidadosamente las mediciones. Registran temperatura y humedad junto a la resistencia del sensor, usan modelos físicos establecidos para compensar efectos ambientales y convierten relaciones entre sensores en valores parecidos a concentraciones. Un par de unidades sensoras fijas “aguas arriba” en aire limpio rastrean el fondo que aumenta lentamente, que luego se resta de todas las demás lecturas. Finalmente, para los experimentos de rejilla, promedian muchas muestras en cada ubicación en un único valor por magnitud, convirtiendo el volumen del túnel en una matriz 3D de pequeños cubos (voxeles) que almacenan nivel de gas, vector de viento y datos ambientales.
Un banco de pruebas estándar para robots con detección de gases más inteligentes
El conjunto de datos Red:Vapor supera colecciones anteriores al combinar alta resolución espacial, cobertura 3D completa, obstáculos realistas y grabaciones paralelas de sensores tanto económicos como de alta gama, todo bajo condiciones de viento cuidadosamente monitorizadas. Permite a los investigadores comparar cómo se comportan los sensores de óxido metálico baratos frente a detectores por fotoionización rápidos y lineales, explorar cuánto tiempo deben permanecer los sensores para captar lecturas significativas y probar algoritmos para mapear distribuciones de gas y localizar fuentes. Dado que está disponible abiertamente todo, desde voltajes crudos hasta mapas voxel preprocesados y modelos 3D de la planta en miniatura, el conjunto de datos puede servir como un punto de referencia compartido. Para un público no especializado, la idea principal es que este trabajo proporciona un “patio de juegos en túnel de viento” realista donde se pueden desarrollar, probar y comparar de forma justa nuevas ideas para robots olfativos y modelos de penachos basados en datos antes de desplegarlos en sitios industriales reales o incluso en otros mundos.
Cita: Hinsen, P., Wiedemann, T., Shutin, D. et al. High-Resolution Wind Tunnel Dataset of Gas Sensor Responses to Vapor Plumes in Scale Model Landscapes. Sci Data 13, 586 (2026). https://doi.org/10.1038/s41597-026-06927-8
Palabras clave: detección de gases robótica, experimentos en túnel de viento, mapeo de penachos de vapor, conjunto de datos de sensores de gas, localización de la fuente