Clear Sky Science · zh
关于条纹投影轮廓测量精度模型:统一、简化与关联
用光条看见形状
从手机面部识别到检查喷气发动机零件的光洁度,许多技术都依赖精确测量三维形状。本文深入研究了一种极为精确的光学方法——条纹投影轮廓测量(fringe projection profilometry),并以清晰且统一的方式展示如何预测并改进其测量精度。
条纹图案如何揭示三维形状
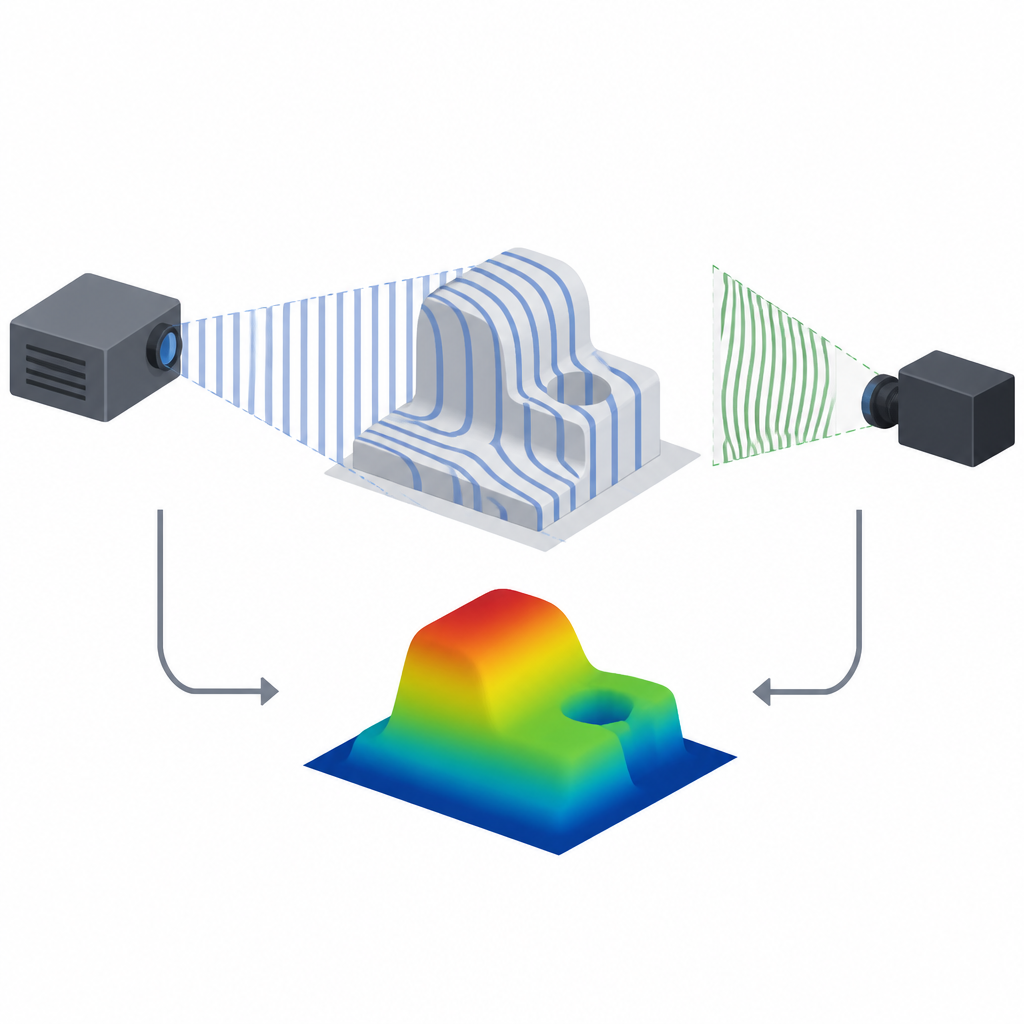
条纹投影轮廓测量有点像将等距的光条投射在物体上并观察这些条纹如何弯曲。投影仪发出直线光图案,相机记录物体表面如何变形这些图案。通过将每个相机像素与对应的投影像素匹配,计算机可以利用简单的几何关系重建物体表面点的三维位置。这样,光与影被转换为高度精细的深度地图,精度常可达到数微米,适用于从小型零件到较大机械部件的尺寸范围。
三种观察同一物体的方式
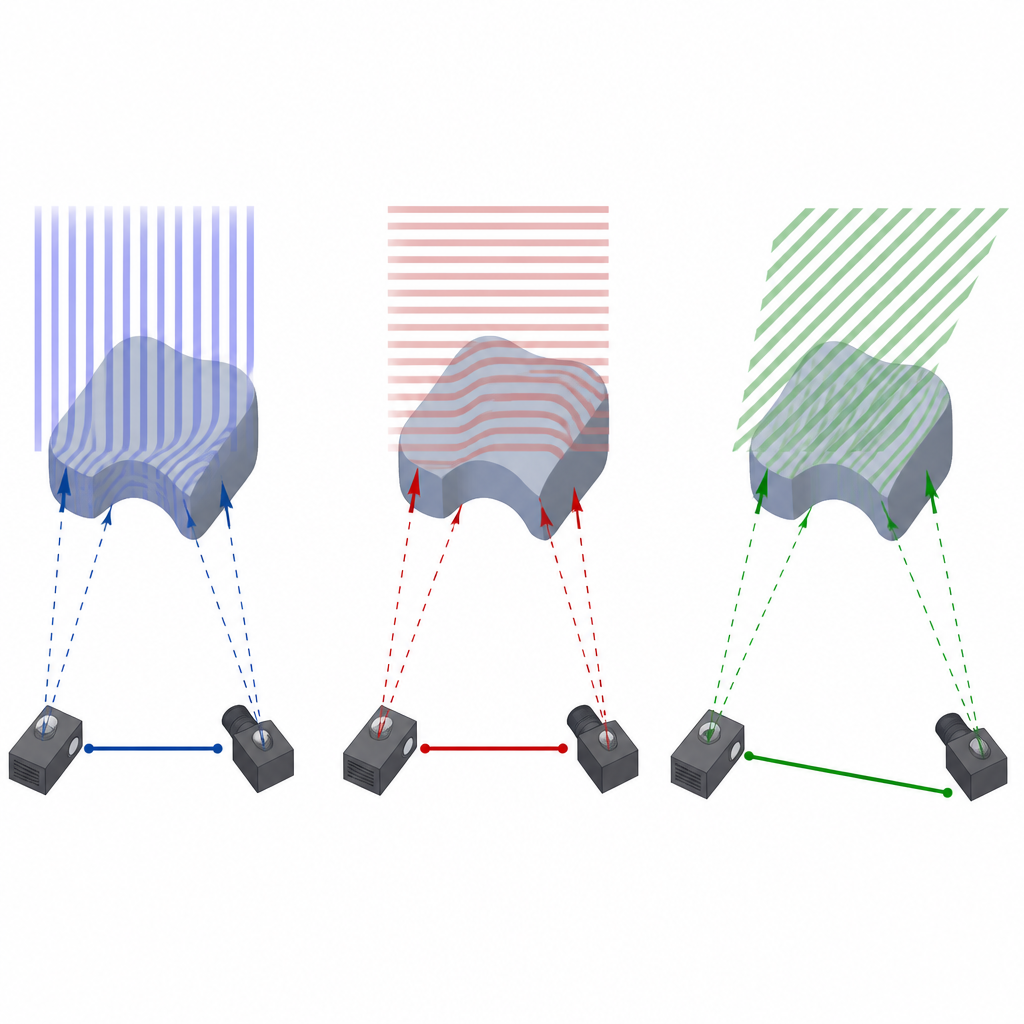
工程师可以为投影条纹选择不同的方向,这一选择会影响深度测量的精度。文章聚焦三种常见的布局。第一种投射垂直条纹,系统主要利用水平方向的信息;第二种使用水平条纹,更依赖垂直信息;第三种在一个与相机和投影仪几何关系相关的倾斜角度投射条纹。尽管这些方法在实践中看起来不同,作者表明它们都可以用同一个统一的精度数学模型来描述。
解释精度的三角关系
通过重推早期公式,作者发现了三种方法之间一个整齐的直角三角关系。当以深度的标准差来表示精度时,垂直和水平方法精度的倒数构成直角三角形的两条短边,而倾斜条纹方法精度的倒数则构成斜边。这意味着在给定系统几何条件下,倾斜条纹方法总是能提供最佳精度,而垂直和水平方法则可被视为使用了相机与投影仪之间部分几何杠杆的更简单、略逊一筹的特例。
把复杂的相机几何简化为简单的设计规则
完整的精度模型依赖许多相机与投影仪参数,实际构建系统时难以直观把握。为使模型更实用,作者进行了两步主要简化。首先,他们考虑一种常见布局:投影方向与连接相机和投影仪的连线垂直。在这种情况下,可以定义一个“有效基线”,将物理间距与焦距合并为单一长度。此时三种方法又形成另一个直角三角形:该有效基线越长,深度精度越好。第二,他们提炼出相机与投影仪视线之间的简单夹角,表明精度主要随到物体距离的平方缩放,并与有效基线以及该夹角的余弦成反比。这为系统设计者提供了直接的几何把握手段。
与立体视觉和激光测距的关联
由于所有这些系统都依赖三角测量,作者将他们的精度公式与立体相机系统和激光三角传感器使用的公式进行了比较。经过适当简化,表达式一致:以最佳角度投射的条纹投影在精度层面上表现得就像具有相同基线的双相机立体视觉系统,并且它与激光系统中观察到的视角依赖性相同。这一定量联系支持了长期以来的观点:这些方法是相同几何原理的不同表现,主要区别在于它们如何寻找对应点以及噪声如何进入测量。
面向实际测量的设计工具
为将理论应用到实践,作者分析了精度对设计选择(例如工作距离、基线长度、条纹周期和相机噪声)的敏感性。他们展示了如何制定更严格的设计目标,以便真实系统在存在不完美条件下仍能满足所需精度。在简化模型的基础上,作者开发了名为 FPP-Planner 的软件工具,允许工程师指定期望精度和测量距离,然后给出合适的相机—投影仪间距、视角和图案设置。对平面和球体的实验表明,预测精度通常与实际测得性能相差只有几个百分点,证实这些模型可以可靠地指导高精度三维测量系统的设计。
这对高科技制造为何重要
简言之,本文说明了如何在构建之前预测三维光学测量系统的“清晰度”,以及如何调整布局以达到期望的细节水平。通过将三种常见的条纹投影变体统一到一个框架中,并将它们与其他三角测量方法关联,作者为在简洁性和最大精度之间进行选择提供了清晰的路线图。对于从半导体制造到先进制造业等要求越来越严格公差的行业,这些结果为设计满足给定精度预算的条纹式三维扫描仪提供了实用配方。
引用: Lv, S., Huang, N., Zou, Y. et al. On the precision models of fringe projection profilometry: unification, simplification and connection. Light Sci Appl 15, 232 (2026). https://doi.org/10.1038/s41377-026-02300-x
关键词: 条纹投影轮廓测量, 三维形状测量, 光学测量, 立体视觉, 激光三角测量