Clear Sky Science · he
על מודלים של דיוק בפרופילומטריית הקרנת רצועות: איחוד, פישוט וקישור
לראות צורה באמצעות רצועות אור
מתקליטנים לזיהוי פנים בטלפונים ועד בדיקת חלקי מנועי סילון, טכנולוגיות רבות נשענות על מדידת צורות תלת־ממדיות בדיוק גבוה. מאמר זה בוחן לעומק אחת השיטות האופטיות המדויקות ביותר לביצוע מדידות אלה — פרופילומטריית הקרנת רצועות — ומציג דרך ברורה מאוחדת לחזות ולשפר את דיוקה.
כיצד דפוסי רצועות חושפים צורה תלת־ממדית
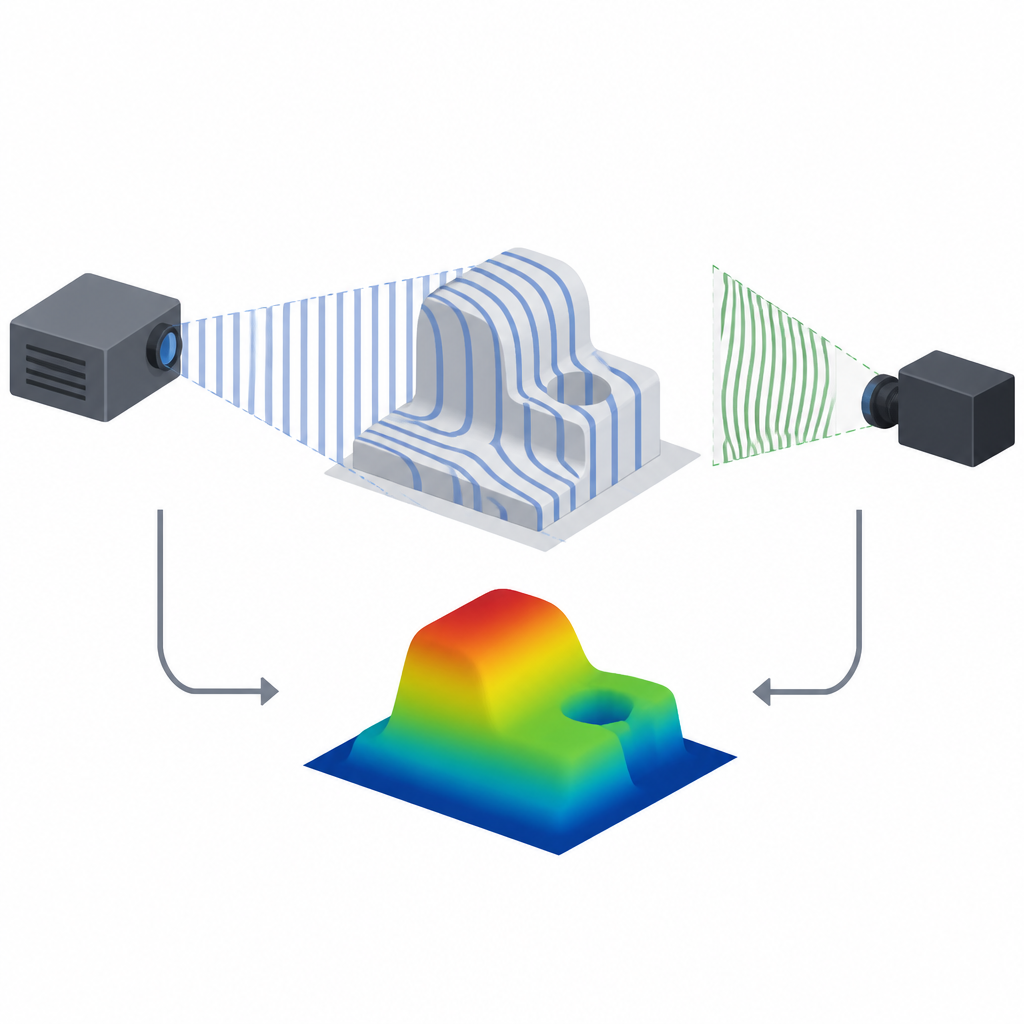
פרופילומטריית הקרנת רצועות פועלת בדומה להטלת רצועות מאורגנות על פני עצם וצפייה כיצד הן מתעוותות. מקרן מקרין דפוסי אור ישרים, ומצלמה מקליטה כיצד משטח העצם מעקם אותם. באמצעות התאמת כל פיקסל מצלמה לפיקסל מקביל במקרן, מחשב יכול להשתמש בגאומטריה פשוטה כדי לשחזר את המיקום התלת־ממדי של נקודות על המשטח. כך אור וצל הופכים למפת עומק מפורטת, לעתים עד רזולוציה של כמה מיקרומטרים בחלקים שנעים מרכיבים קטנים ועד חלקים מכניים גדולים יותר.
שלוש דרכים להסתכל על אותו גוף
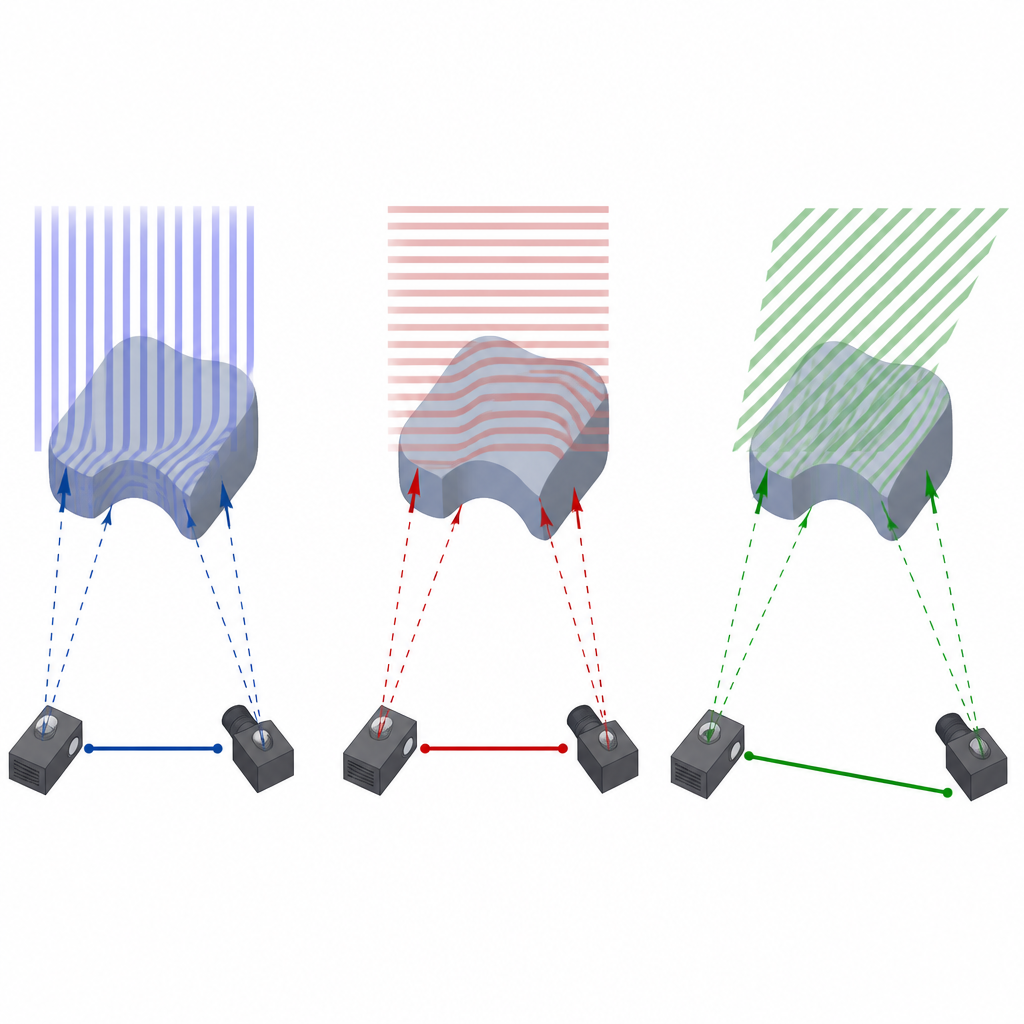
מהנדסים יכולים לבחור כיוונים שונים לרצועות המוקרנות, ובחירה זו משפיעה על דיוק מדידת העומק. המאמר מתמקד בשלוש סידורות פופולריות. הראשונה מקרינה רצועות אנכיות, והמערכת מתבססת בעיקר על מידע בכיוון האופקי. בשנייה משתמשים ברצועות אופקיות, ומתבססים יותר על מידע אנכי. השיטה השלישית משתמשת ברצועות בזווית מוטה שמחושבת בקפידה וקושרת את הזווית לגאומטריה בין המצלמה למקרן. אף על פי שהשיטות נראות שונות בפועל, המחברים מראים שניתן לתאר אותן כולן באמצעות מודל מתמטי מאוחד אחד של דיוק.
משולש שמסביר את הדיוק
על־ידי עיבוד מחדש של נוסחאות קודמות, המחברים מגלים יחס משולש ישר זוית אלגנטי בין שלוש השיטות. כאשר הדיוק נכתב במונחי סטיית תקן של העומק, המופעים ההופכיים של הדיוקים בשיטות האנכית והאופקית יוצרים את שתי הצלעות הקצרות של המשולש, בעוד המופע ההופכי של הדיוק בשיטת הרצועות המוטות מהווה את הצלע הארוכה. משמעות הדבר היא ששיטת הרצועות המוטות תמיד נותנת את הדיוק הטוב ביותר עבור גאומטריית המערכת הנתונה, בעוד הגרסאות האנכית והאופקית נחשבות כמקרים פשוטים ומעט פחות מדויקים המשתמשים רק בחלק מהמומנט הגאומטרי הזמין בין מצלמה למקרן.
הפיכת גאומטריית מצלמה מורכבת לכללי עיצוב פשוטים
מודל הדיוק המלא תלוי בפרמטרים רבים של מצלמה ומקרן שקשה לחשוב עליהם בעת בניית מערכת ממשית. כדי להפוך זאת למעשי, המחברים מפשטים בשני שלבים עיקריים. ראשית, הם שוקלים תצורה נפוצה שבה כיוון המבט של המקרן נורמלי לקו המקשר בין המצלמה למקרן. במקרה זה מוגדר "בסיס אפקטיבי" המשלב את המרחק הפיזי ואורכי המוקד לאורך יחיד. שלוש השיטות יוצרות אז משולש ישר נוסף, הפעם במונחי בסיסים אפקטיביים אלה: ככל שהאורך האפקטיבי גדול יותר, כך טוב יותר דיוק העומק. שנית, הם בודדים את הזווית הפשוטה בין כיווני המבט של המצלמה והמקרן ומראים כי הדיוק בעיקרו מתדרג כריבוע המרחק לעצם, ובהפוך ביחס לבסיס האפקטיבי ולקוסינוס של זווית זו. זה נותן ידית גאומטרית ישירה למעצבי מערכות.
קישור לראייה סטריאו ולמדידת מרחק בלייזר
מכיוון שכל המערכות הללו נשענות על משולשיות, המחברים משווים את נוסחאות הדיוק שלהן לאלה המשמשות במערכי מצלמות סטריאו ובחיישני משולש לייזר. לאחר פישוטים מתאימים, הביטויים מתיישבים: הקרנת רצועות בזווית אופטימלית מתנהגת, ברמת הדיוק, כאילו מדובר בסטריאו של שתי מצלמות עם אותו בסיס, והיא חולקת את אותה תלות בזווית הצפייה הנמצאת גם במערכות מבוססות לייזר. הקישור הכמותי הזה מחזק את התפיסה הרווחת ששיטות אלה הן פרצופים שונים של אותו עיקרון גאומטרי, השונים בעיקר באופן בו הן מוצאות נקודות תואמות ובאיזה אופן רעש נכנס למדידות.
כלי עיצוב למדידות בעולם האמיתי
כדי לעבור מתיאוריה לפרקטיקה, המחברים מנתחים עד כמה הדיוק רגיש לבחירות עיצוביות כגון מרחק עבודה, אורך בסיס, תקופת רצועה ורעש מצלמה. הם מראים כיצד לקבוע מטרות עיצוב מחמירות כך שמערכות אמיתיות עדיין יעמדו בדרישות הדיוק למרות ליקויים. בהתבסס על המודל המופשט, הם בונים כלי תוכנה בשם FPP-Planner שמאפשר למהנדסים לציין דיוק רצוי ומרחק מדידה, ואז מציע מרחקי מצלמה–מקרן מתאימים, זוויות צפייה והגדרות דפוס. ניסויים עם מישורים וכדורים מראים שהדיוק החזוי בדרך כלל תואם את הביצועים הנמדדים בטווח של כמה אחוזים, ומאשר שהמודלים הללו אכן יכולים להנחות בעקביות את עיצובם של מערכות מדידה תלת־ממדיות מדויקות.
מדוע זה חשוב לייצור מתקדם
במילים פשוטות, מאמר זה מסביר כיצד לחזות עד כמה "חדה" תהיה מערכת מדידה אופטי תלת־ממד לפני בנייתה, וכיצד לכוונן את פריסתה כדי להגיע לרמת פירוט רצויה. על־ידי איחוד שלוש וריאציות נפוצות של הקרנת רצועות למסגרת אחת וקישורן לשיטות משולשיות אחרות, המחברים מספקים מפה ברורה לבחירה בין פשטות ומקסימום דיוק. לתעשיות שדורשות סבילות צמידות יותר ויותר, מתעשיית השבבים ועד ייצור מתקדם, תוצאות אלו מציעות מתכון מעשי לתכנון סורקי 3D המבוססי רצועות שעמידים בעמידה בתקציב הדיוק המבוקש.
ציטוט: Lv, S., Huang, N., Zou, Y. et al. On the precision models of fringe projection profilometry: unification, simplification and connection. Light Sci Appl 15, 232 (2026). https://doi.org/10.1038/s41377-026-02300-x
מילות מפתח: פרופילומטריית הקרנת רצועות, מדידת צורה תלת־ממדית, מטrologie אופטית, ראייה סטריאו, משולש לייזר