Clear Sky Science · nl
Over de precisiemodellen van fringe projection profilometry: unificatie, vereenvoudiging en verbinding
Vorm zien met lichtstrepen
Van gezichtsherkenning op telefoons tot het controleren van de gladheid van straalmotoronderdelen: veel technologieën vertrouwen op het uiterst precies meten van 3D-vormen. Dit artikel kijkt naar een van de meest nauwkeurige optische methoden daarvoor, fringe projection profilometry, en laat op een heldere en eenduidige manier zien hoe je de precisie kunt voorspellen en verbeteren.
Hoe strookpatronen 3D-vorm onthullen
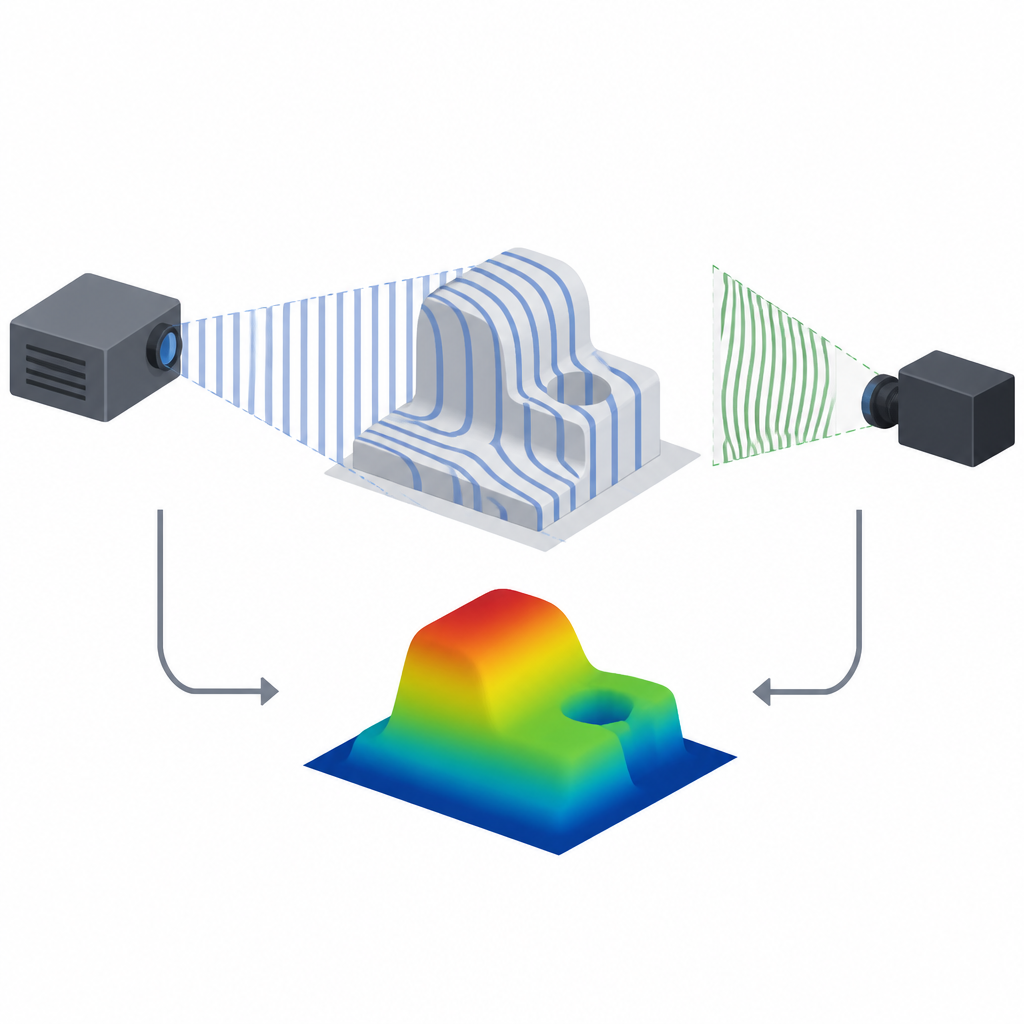
Fringe projection profilometry werkt een beetje alsof je gelijkmatig verdeelde strepen op een object projecteert en kijkt hoe die strepen buigen. Een projector stuurt rechte lichtpatronen uit, terwijl een camera registreert hoe het oppervlak van het object die patronen vervormt. Door elke camerapixel te koppelen aan een corresponderende projectorpixel, kan een computer met eenvoudige geometrie de 3D-positie van punten op het object reconstrueren. Zo worden licht en schaduw omgezet in een zeer gedetailleerde dieptekaart, vaak met nauwkeurigheid tot enkele micrometers voor objecten variërend van kleine componenten tot grotere machineonderdelen.
Drie manieren om naar hetzelfde object te kijken
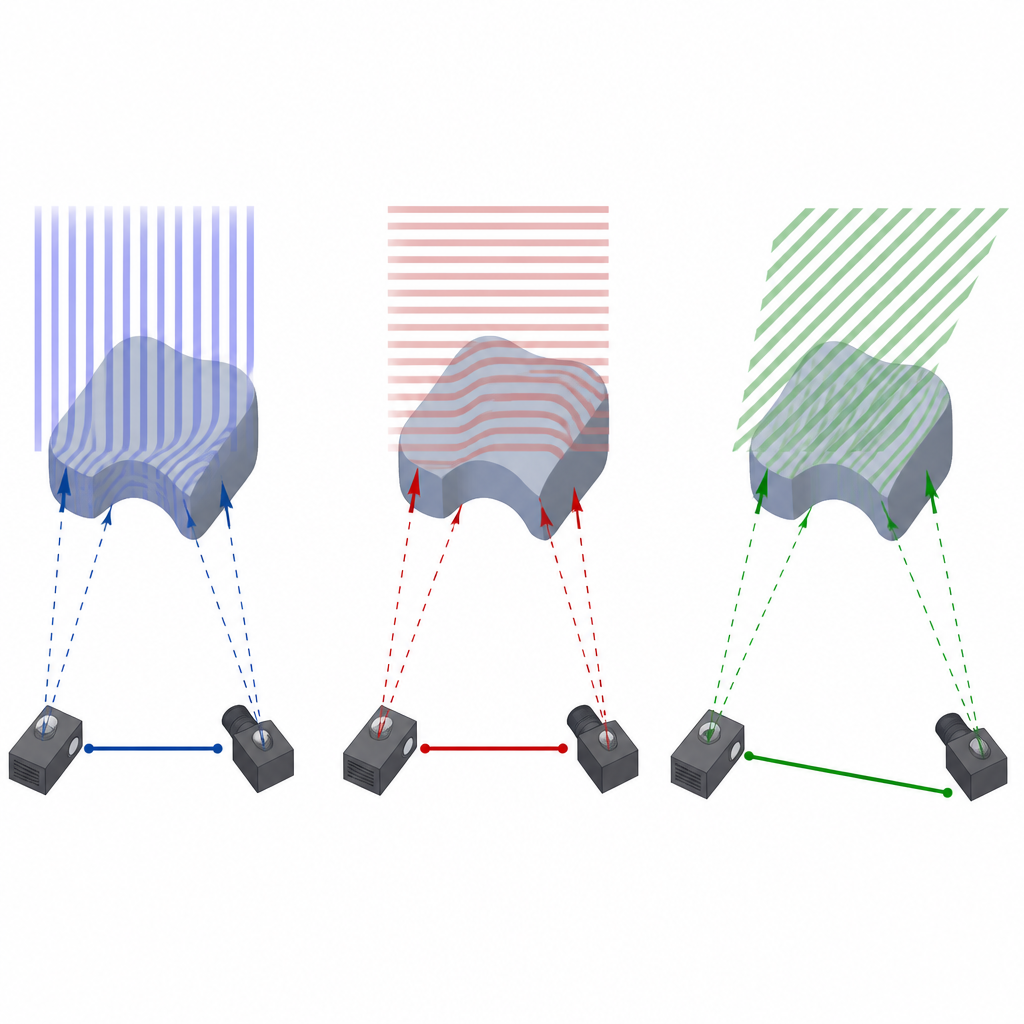
Ontwerpers kunnen verschillende richtingen kiezen voor de geprojecteerde strepen, en die keuze beïnvloedt hoe nauwkeurig de diepte gemeten kan worden. Het artikel richt zich op drie veelgebruikte opstellingen. In de eerste worden verticale strepen geprojecteerd en gebruikt het systeem voornamelijk informatie in de horizontale richting. In de tweede worden horizontale strepen toegepast en vertrouwt men meer op verticale informatie. De derde methode gebruikt strepen onder een zorgvuldig gekozen schuine hoek die gekoppeld is aan de geometrie tussen camera en projector. Hoewel deze methoden er in de praktijk anders uitzien, laten de auteurs zien dat ze allemaal beschreven kunnen worden door één gedeeld wiskundig precisiemodel.
Een driehoek die precisie verklaart
Door eerdere formules te herschikken, ontdekken de auteurs een elegante rechthoekige driehoekrelatie tussen de drie methoden. Wanneer precisie wordt uitgedrukt als de standaarddeviatie van de diepte, vormen de inversen van de precisies van de verticale en horizontale methoden de twee korte zijden van een rechthoekige driehoek, terwijl de inverse van de precisie van de schuine-streepmethode de langste zijde vormt. Dit betekent dat de schuine-streepmethode altijd de beste precisie biedt voor een gegeven systeemgeometrie, terwijl de verticale en horizontale versies kunnen worden gezien als eenvoudigere, iets minder precieze speciale gevallen die slechts een deel van de beschikbare geometrische hefboomwerking tussen camera en projector gebruiken.
Complexe camerageometrie omzetten in eenvoudige ontwerpregels
Het volledige precisiemodel hangt af van vele camera- en projectorparameters die moeilijk te overzien zijn bij het bouwen van een echt systeem. Om het praktisch bruikbaar te maken, vereenvoudigen de auteurs in twee hoofdstappen. Ten eerste beschouwen ze een veelgebruikte opstelling waarbij de kijkrichting van de projector loodrecht staat op de lijn die camera en projector verbindt. In dit geval kan een “effectieve basislijn” worden gedefinieerd die de fysieke afstand en brandpuntsafstanden samenvoegt tot één lengte. De drie methoden vormen dan opnieuw een rechthoekige driehoek, ditmaal in termen van deze effectieve basislijnen: hoe langer deze lengte, hoe beter de dieptenauwkeurigheid. Ten tweede isoleren ze de eenvoudige hoek tussen de kijkrichtingen van camera en projector en tonen ze aan dat de precisie grotendeels schaalt met het kwadraat van de afstand tot het object, en omgekeerd met de effectieve basislijn en de cosinus van deze hoek. Dat geeft ontwerpers een directe geometrische greep op het systeem.
Verbinding met stereozicht en laserafstandsmeting
Aangezien al deze systemen op triangulatie berusten, vergelijken de auteurs hun precisieformules met die in stereocamerarigs en lasertriangulatiesensoren. Na passende vereenvoudigingen vallen de uitdrukkingen samen: fringe projection met optimaal georiënteerde strepen gedraagt zich, op precisieniveau, net als een twee-camera stereosysteem met dezelfde baseline, en deelt dezelfde afhankelijkheid van kijkhoek die ook in lasersystemen voorkomt. Deze kwantitatieve koppeling ondersteunt de lang bestaande opvatting dat deze methoden verschillende gedaanten zijn van hetzelfde geometrische principe, die vooral verschillen in hoe corresponderende punten worden gevonden en hoe ruis in de metingen binnensluipt.
Ontwerphulpmiddelen voor metingen in de praktijk
Om van theorie naar praktijk te gaan analyseren de auteurs hoe gevoelig de precisie is voor ontwerpkeuzes zoals werkafstand, baselinelengte, strookperiode en cameraruis. Ze laten zien hoe strengere ontwerpeisen kunnen worden opgesteld zodat echte systemen hun vereiste precisie blijven halen ondanks imperfecties. Voortbouwend op het vereenvoudigde model creëren ze een softwaretool genaamd FPP-Planner waarmee ingenieurs een gewenste precisie en meetafstand kunnen opgeven en die vervolgens geschikte camera–projectorafstanden, kijkhoeken en patrooninstellingen aanbeveelt. Experimenten met vlakken en bollen laten zien dat de voorspelde precisie meestal binnen enkele procenten overeenkomt met de gemeten prestaties, wat bevestigt dat deze modellen betrouwbaar kunnen helpen bij het ontwerpen van hoogprecisie 3D-meetsystemen.
Waarom dit belangrijk is voor hightechproductie
Simpel gezegd legt dit artikel uit hoe je kunt voorspellen hoe “scherp” een optisch 3D-meetsysteem zal zijn voordat het gebouwd is, en hoe je de opstelling kunt afstemmen om een gewenst detailniveau te bereiken. Door drie gangbare varianten van streepprojectie te verenigen in één raamwerk en ze te koppelen aan andere triangulatiemethoden, bieden de auteurs een duidelijke kaart voor de afweging tussen eenvoud en maximale precisie. Voor industrieën die steeds strengere toleranties eisen, van halfgeleiderfabricage tot geavanceerde productie, bieden deze resultaten een praktisch recept om streepgebaseerde 3D-scanners te ontwerpen die betrouwbaar binnen een gegeven precisiebudget blijven.
Bronvermelding: Lv, S., Huang, N., Zou, Y. et al. On the precision models of fringe projection profilometry: unification, simplification and connection. Light Sci Appl 15, 232 (2026). https://doi.org/10.1038/s41377-026-02300-x
Trefwoorden: fringe projection profilometry, 3D vormmeting, optische metrologie, stereozicht, lasertriangulatie