Clear Sky Science · es
Sobre los modelos de precisión de la profilometría por proyección de franjas: unificación, simplificación y conexión
Ver la forma con franjas de luz
Desde el reconocimiento facial en teléfonos hasta la comprobación de la suavidad de piezas de motores a reacción, muchas tecnologías dependen de medir formas 3D con gran precisión. Este artículo analiza en detalle uno de los métodos ópticos más precisos para ello, llamado profilometría por proyección de franjas, y muestra cómo predecir y mejorar su precisión de forma clara y unificada.
Cómo los patrones de franjas revelan la forma 3D
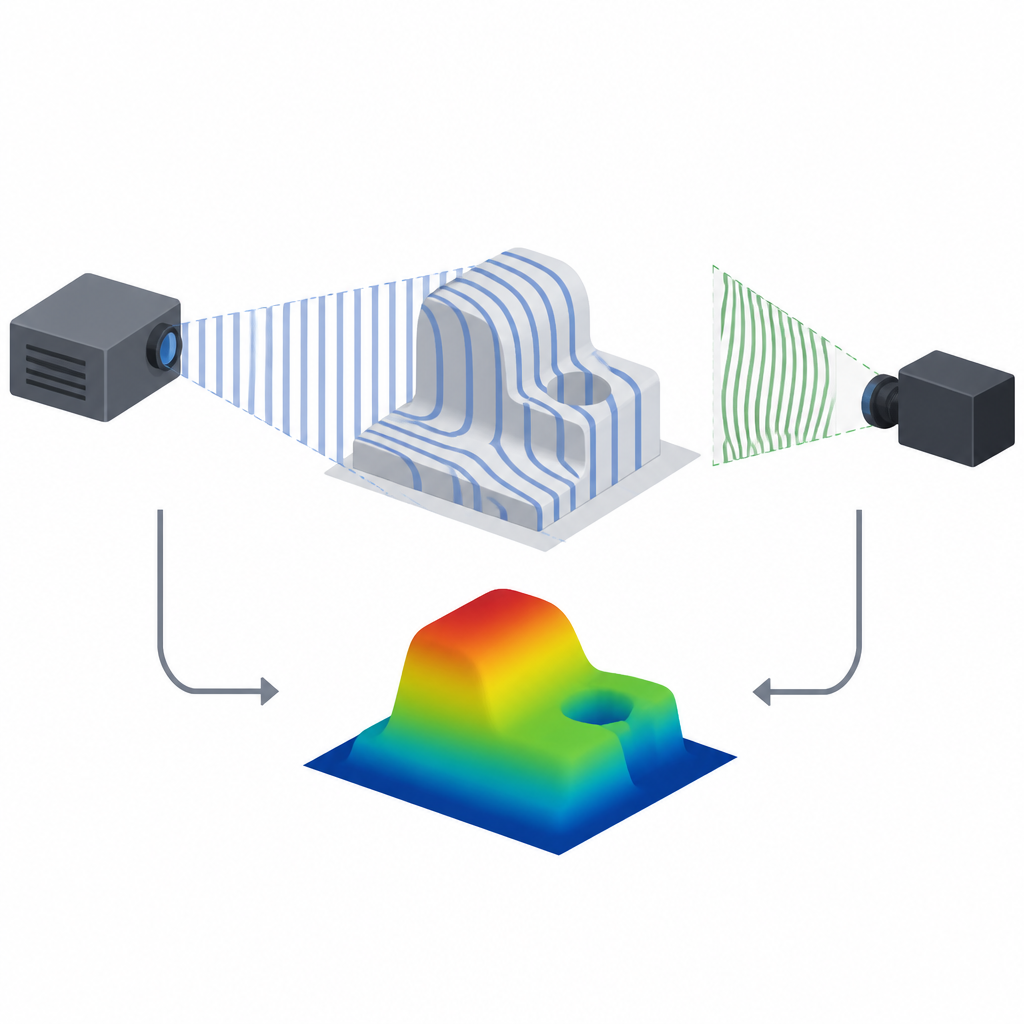
La profilometría por proyección de franjas funciona un poco como proyectar franjas equiespaciadas sobre un objeto y observar cómo se deforman. Un proyector emite patrones de luz rectilíneos, mientras que una cámara registra cómo la superficie del objeto los distorsiona. Al emparejar cada píxel de la cámara con un píxel correspondiente del proyector, un ordenador puede usar geometría simple para reconstruir la posición 3D de puntos en la superficie. Esto convierte la luz y la sombra en un mapa de profundidad muy detallado, a menudo con precisión de unos pocos micrómetros en escalas que van desde pequeños componentes hasta piezas mecánicas mayores.
Tres maneras de mirar el mismo objeto
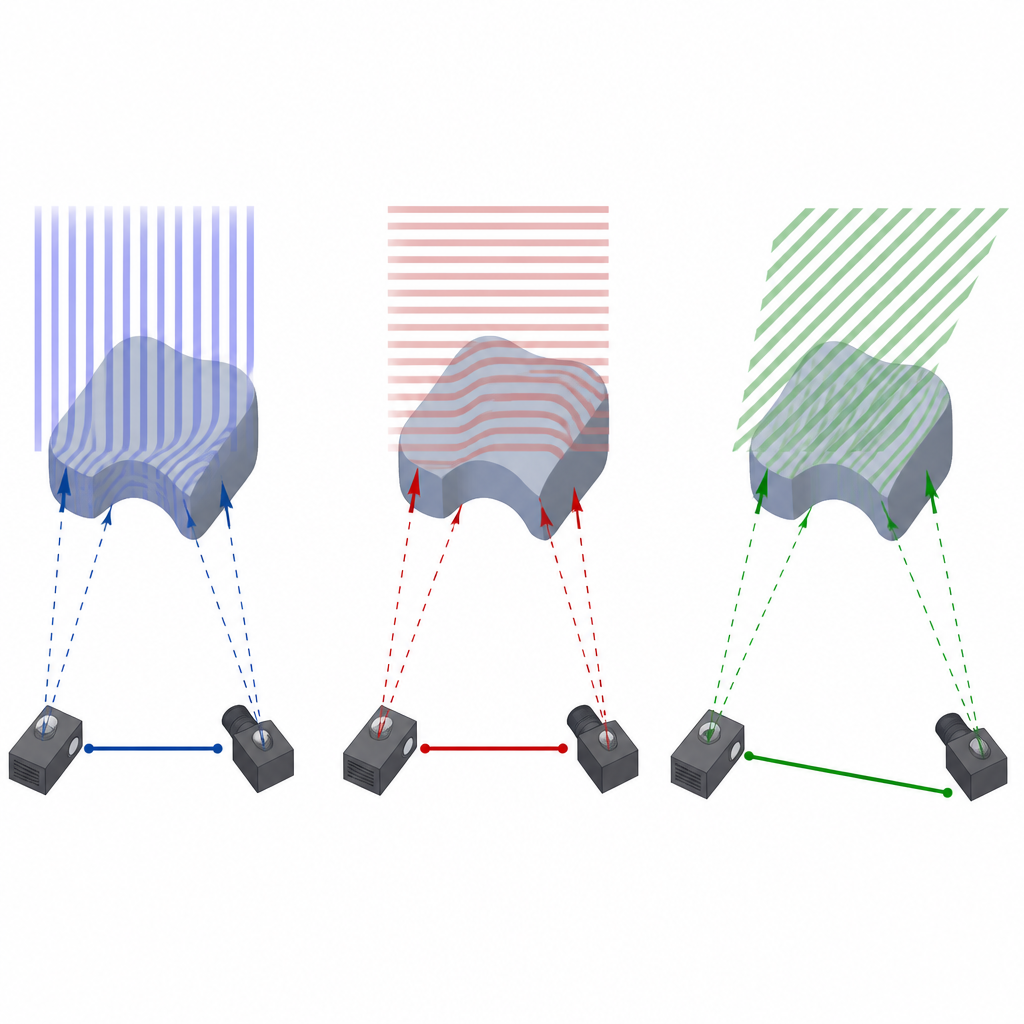
Los ingenieros pueden elegir diferentes direcciones para las franjas proyectadas, y esa elección afecta a la precisión con la que se mide la profundidad. El artículo se centra en tres configuraciones populares. En la primera, se proyectan franjas verticales y el sistema usa principalmente información en la dirección horizontal. En la segunda, se usan franjas horizontales, confiando más en información vertical. El tercer método emplea franjas en un ángulo oblicuo escogido cuidadosamente y relacionado con la geometría entre cámara y proyector. Aunque estos métodos parecen distintos en la práctica, los autores muestran que todos se describen mediante un único modelo matemático compartido de precisión.
Un triángulo que explica la precisión
Al reexaminar fórmulas anteriores, los autores descubren una elegante relación de triángulo rectángulo entre los tres métodos. Cuando la precisión se expresa en términos de desviación estándar de la profundidad, los recíprocos de las precisiones de los métodos vertical y horizontal forman los dos catetos de un triángulo rectángulo, mientras que el recíproco de la precisión del método de franjas oblicuas forma la hipotenusa. Esto significa que el método de franjas oblicuas siempre ofrece la mejor precisión para una geometría del sistema dada, mientras que las versiones vertical y horizontal pueden verse como casos especiales más simples y ligeramente menos precisos que usan solo parte del apalancamiento geométrico disponible entre cámara y proyector.
Convertir geometría compleja de cámara en reglas de diseño simples
El modelo completo de precisión depende de muchos parámetros de cámara y proyector que resultan difíciles de manejar al construir un sistema real. Para hacerlo práctico, los autores simplifican en dos pasos principales. Primero, consideran una disposición común en la que la dirección de visión del proyector es perpendicular a la línea que conecta cámara y proyector. En ese caso se puede definir una "línea base efectiva" que combina el espaciado físico y las longitudes focales en una sola distancia. Los tres métodos forman entonces otro triángulo rectángulo, esta vez en términos de estas líneas base efectivas: cuanto mayor es esta longitud, mejor es la precisión en profundidad. Segundo, extraen el ángulo simple entre las direcciones de visión de cámara y proyector y muestran que la precisión escala principalmente con el cuadrado de la distancia al objeto, e inversamente con la línea base efectiva y con el coseno de ese ángulo. Eso ofrece una palanca geométrica directa para los diseñadores de sistemas.
Vínculo con visión estéreo y telémetros láser
Puesto que todos estos sistemas se basan en triangulación, los autores comparan sus fórmulas de precisión con las empleadas en configuraciones de cámaras estéreo y en sensores de triangulación láser. Tras las simplificaciones adecuadas, las expresiones coinciden: la proyección de franjas con ángulo óptimo se comporta, a nivel de precisión, como una visión estéreo con dos cámaras y la misma línea base, y comparte la misma dependencia del ángulo de visión que se encuentra en sistemas basados en láser. Este vínculo cuantitativo respalda la visión tradicional de que estos métodos son caras distintas del mismo principio geométrico, diferenciándose principalmente en cómo encuentran puntos correspondientes y en cómo entra el ruido en las mediciones.
Herramientas de diseño para mediciones del mundo real
Para pasar de la teoría a la práctica, los autores analizan la sensibilidad de la precisión frente a elecciones de diseño como la distancia de trabajo, la longitud de la línea base, el periodo de las franjas y el ruido de la cámara. Muestran cómo fijar objetivos de diseño más estrictos para que los sistemas reales sigan cumpliendo la precisión requerida a pesar de las imperfecciones. Basándose en el modelo simplificado, crean una herramienta de software llamada FPP-Planner que permite a los ingenieros especificar una precisión deseada y la distancia de medición, y luego sugiere el espaciado cámara–proyector, los ángulos de visión y los ajustes del patrón. Experimentos con planos y esferas demuestran que la precisión predicha suele coincidir con el rendimiento medido en unos pocos porcentajes, confirmando que estos modelos pueden guiar de forma fiable el diseño de sistemas de medición 3D de alta precisión.
Por qué esto importa para la fabricación de alta tecnología
En términos sencillos, este artículo explica cómo predecir cuán “nítido” será un sistema óptico de medición 3D antes de construirlo, y cómo sintonizar su disposición para alcanzar un nivel de detalle deseado. Al unificar tres variantes comunes de proyección de franjas en un solo marco y al relacionarlas con otros métodos de triangulación, los autores ofrecen un mapa claro para elegir entre simplicidad y máxima precisión. Para industrias que exigen tolerancias cada vez más estrictas, desde la fabricación de semiconductores hasta la manufactura avanzada, estos resultados proporcionan una receta práctica para diseñar escáneres 3D basados en franjas que cumplan de forma fiable un presupuesto de precisión dado.
Cita: Lv, S., Huang, N., Zou, Y. et al. On the precision models of fringe projection profilometry: unification, simplification and connection. Light Sci Appl 15, 232 (2026). https://doi.org/10.1038/s41377-026-02300-x
Palabras clave: profilometría por proyección de franjas, medición de forma 3D, metrología óptica, visión estéreo, trilateración láser