Clear Sky Science · sv
Om precisionens modeller för fransprojektion-profilometri: enande, förenkling och koppling
Att se form med ljusränder
Från ansiktsigenkänning i mobiltelefoner till kontroll av ytjämnhet på jetmotordelar, bygger många tekniker på att mäta 3D-former med mycket hög precision. Den här artikeln granskar en av de mest precisa optiska metoderna för detta, kallad fransprojektion-profilometri, och visar hur man på ett klart och enhetligt sätt kan förutsäga och förbättra dess precision.
Hur randmönster avslöjar 3D-form
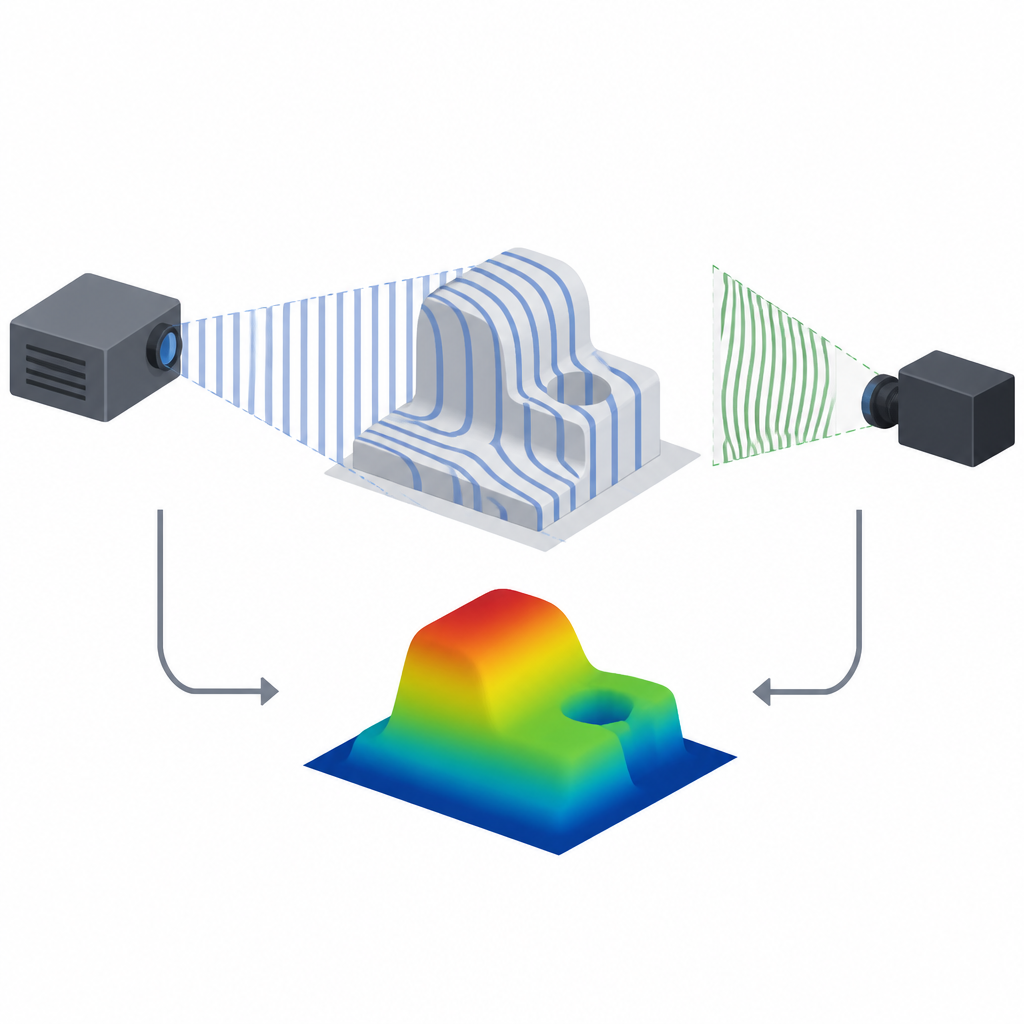
Fransprojektion-profilometri fungerar ungefär som att projicera jämnt fördelade ränder på ett objekt och se hur dessa ränder böjs. En projektor skickar ut raka ljusmönster medan en kamera registrerar hur objektets yta förvränger dem. Genom att koppla varje kamerapixel till en motsvarande projektorpixel kan en dator använda enkel geometri för att rekonstruera 3D-positionen för punkter på objektet. Detta förvandlar ljus och skugga till en mycket detaljerad djupkarta, ofta med noggrannhet ner till några mikrometer över storlekar från små komponenter till större mekaniska delar.
Tre sätt att betrakta samma objekt
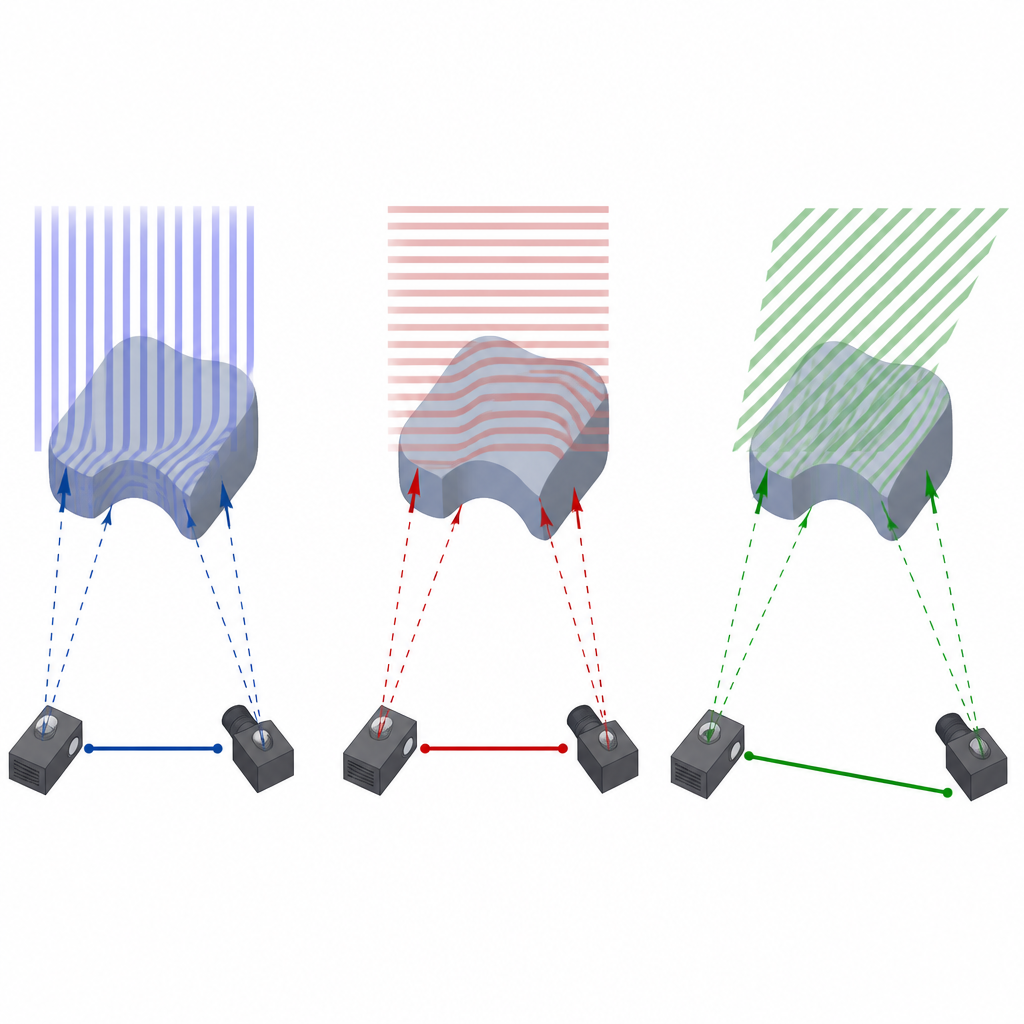
Ingenjörer kan välja olika riktningar för de projicerade ränderna, och det valet påverkar hur exakt djupet kan mätas. Artikeln fokuserar på tre populära uppställningar. I den första projiceras vertikala ränder och systemet använder främst information i horisontell riktning. I den andra används horisontella ränder och förlitar sig mer på vertikal information. Den tredje metoden använder ränder i en noga vald sned vinkel som är kopplad till geometrin mellan kamera och projektor. Även om dessa metoder ser olika ut i praktiken visar författarna att de alla kan beskrivas med en enda gemensam matematisk modell för precision.
En triangel som förklarar precision
Genom att omarbeta tidigare formler upptäcker författarna ett elegant rätvinkligt triangel-förhållande mellan de tre metoderna. När precision uttrycks i termer av standardavvikelse i djup bildar inverserna av precisionerna för den vertikala respektive horisontella metoden de två korta sidorna i en rätvinklig triangel, medan inversen av precisionen för den snedställda randmetoden utgör triangelns längsta sida. Det innebär att den snedställda randmetoden alltid ger bäst precision för en given systemgeometri, medan de vertikala och horisontella varianterna kan ses som enklare, något mindre precisa specialfall som bara utnyttjar en del av den tillgängliga geometriska fördelen mellan kamera och projektor.
Att förvandla komplex kamergeometri till enkla designregler
Den fullständiga precisionmodellen beror på många kamerauppgifter och projektorparametrar som är svåra att hantera vid konstruktion av ett verkligt system. För att göra modellen praktisk förenklar författarna i två huvudsteg. Först betraktas en vanlig uppställning där projektorns siktlinje är vinkelrät mot linjen mellan kamera och projektor. I detta fall kan en "effektiv baslinje" definieras som sammanför det fysiska avståndet och brännvidderna till en enda längd. De tre metoderna bildar då ännu en rätvinklig triangel, denna gång i termer av dessa effektiva baslinjer: ju längre denna längd är, desto bättre djupprecision. För det andra identifierar de den enkla vinkeln mellan kamera- och projektorsiktlinjer och visar att precision huvudsakligen skalar med kvadraten på avståndet till objektet, och är omvänt proportionell mot den effektiva baslinjen och en cosinus av denna vinkel. Det ger ett direkt geometriskt grepp för systemkonstruktörer.
Koppling till stereovision och laseravståndsmätning
Eftersom alla dessa system bygger på triangulering jämför författarna sina precisionformler med de som används i stereo-kamerriggar och lasertrianguleringssensorer. Efter lämpliga förenklingar stämmer uttrycken överens: fransprojektion med optimalt vinklade ränder beter sig, på precisionens nivå, precis som tvåkameras stereo med samma baslinje, och den delar samma beroende av siktvinkel som hittas i laserbaserade system. Denna kvantitativa koppling stöder den länge hållna uppfattningen att dessa metoder är olika skepnader av samma geometriska princip, där de främst skiljer sig åt i hur motsvarande punkter hittas och hur brus påverkar mätningarna.
Designverktyg för verkliga mätningar
För att gå från teori till praktik analyserar författarna hur känslig precisionen är för designval som arbetsavstånd, baslinjelängd, randperiod och kamerabrus. De visar hur man ställer striktare designmål så att verkliga system fortfarande uppfyller sin kravställda precision trots imperfektioner. Med utgångspunkt i den förenklade modellen skapar de ett mjukvaruverktyg kallat FPP-Planner som låter ingenjörer ange önskad precision och mätavstånd, och sedan föreslår lämpligt kamera–projektor-avstånd, siktvinklar och mönsterinställningar. Experiment med plan- och sfäriska ytor visar att den förutsagda precisionen vanligtvis överensstämmer med mätresultat inom några procent, vilket bekräftar att dessa modeller pålitligt kan vägleda konstruktionen av högprecisions 3D-mätsystem.
Varför detta spelar roll för högteknologisk tillverkning
Enkelt uttryckt förklarar denna artikel hur man förutsäger hur "skarp" ett optiskt 3D-mätsystem kommer att vara innan det byggs, och hur man finjusterar dess uppställning för att nå en önskad detaljnivå. Genom att ena tre vanliga varianter av randprojektion i ett ramverk och koppla dem till andra trianguleringsmetoder ger författarna en tydlig karta för att välja mellan enkelhet och maximal precision. För branscher som kräver allt snävare toleranser, från halvledartillverkning till avancerad industriell produktion, erbjuder dessa resultat ett praktiskt recept för att designa randbaserade 3D-skannrar som pålitligt uppfyller en given precisionbudget.
Citering: Lv, S., Huang, N., Zou, Y. et al. On the precision models of fringe projection profilometry: unification, simplification and connection. Light Sci Appl 15, 232 (2026). https://doi.org/10.1038/s41377-026-02300-x
Nyckelord: fransprojektion-profilometri, 3D-formmätning, optisk metrologi, stereovision, lasertriangulering