Clear Sky Science · fr
Sur les modèles de précision de la profilométrie par projection de franges : unification, simplification et mise en relation
Voir la forme avec des bandes de lumière
De la reconnaissance faciale sur téléphone au contrôle de l’aspect superficielles de pièces de moteur d’avion, de nombreuses technologies reposent sur la mesure de formes 3D avec une grande précision. Cet article examine l’une des méthodes optiques les plus précises pour y parvenir, la profilométrie par projection de franges, et montre comment prédire et améliorer sa précision de façon claire et unifiée.
Comment des motifs en bandes révèlent la forme 3D
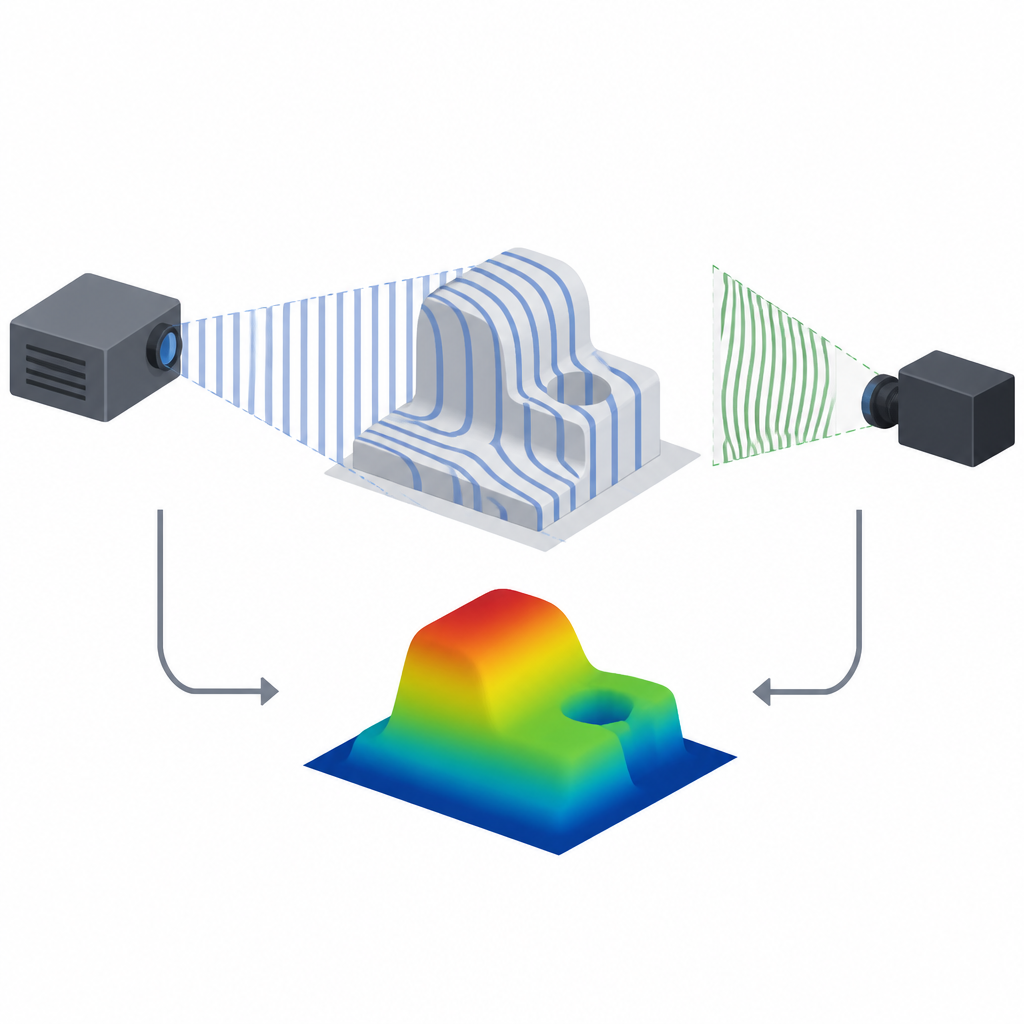
La profilométrie par projection de franges fonctionne un peu comme projeter des bandes régulièrement espacées sur un objet et observer comment ces bandes se déforment. Un projecteur envoie des motifs lumineux droits, tandis qu’une caméra enregistre la manière dont la surface de l’objet les déforme. En rapprochant chaque pixel de la caméra d’un pixel correspondant du projecteur, un ordinateur peut utiliser la géométrie élémentaire pour reconstruire la position 3D des points sur l’objet. La lumière et l’ombre se transforment ainsi en une carte de profondeur très détaillée, souvent avec une précision de l’ordre de quelques micromètres sur des tailles allant de petits composants à des pièces mécaniques plus grandes.
Trois façons de regarder le même objet
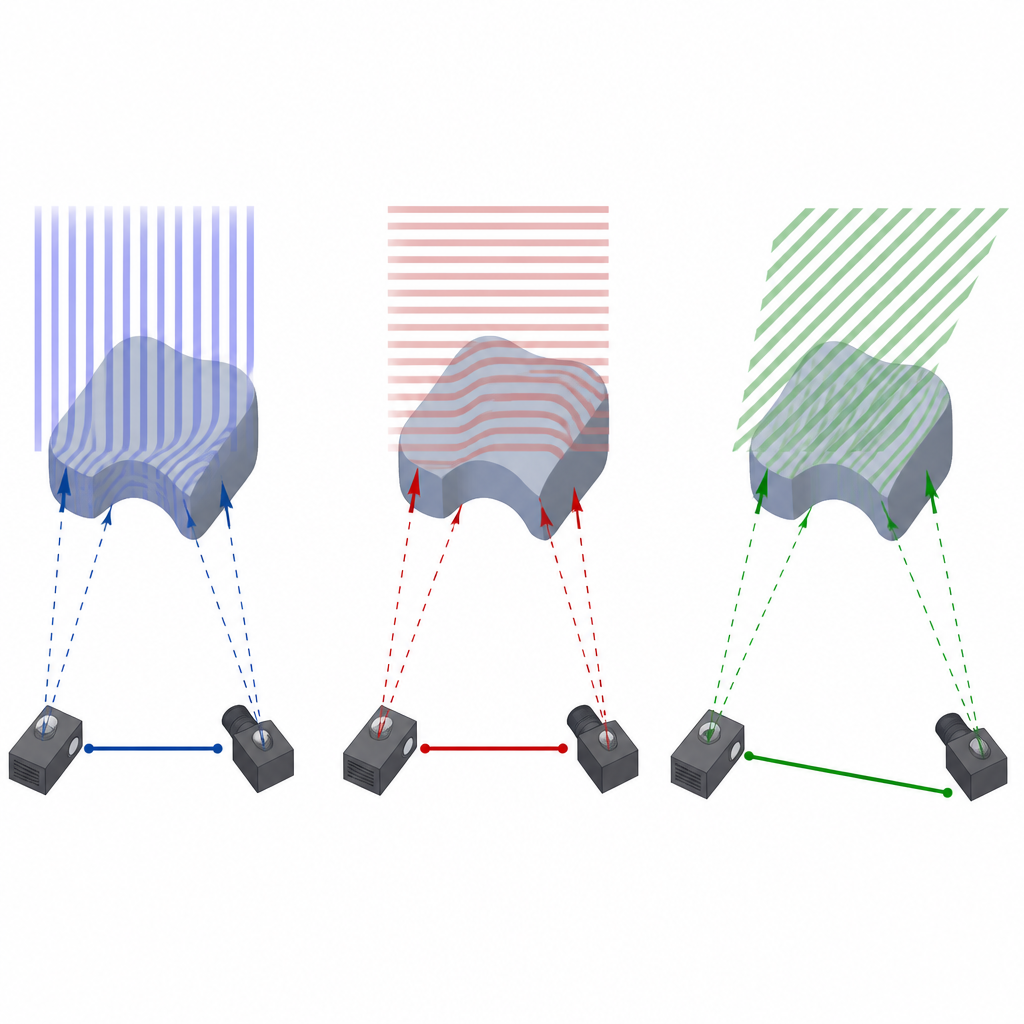
Les ingénieurs peuvent choisir différentes directions pour les bandes projetées, et ce choix affecte la précision de la mesure de profondeur. L’article se concentre sur trois configurations répandues. Dans la première, on projette des bandes verticales et le système exploite principalement l’information selon la direction horizontale. Dans la seconde, on utilise des bandes horizontales, s’appuyant davantage sur l’information verticale. La troisième méthode emploie des bandes inclinées selon un angle soigneusement choisi, lié à la géométrie entre la caméra et le projecteur. Bien que ces méthodes diffèrent en pratique, les auteurs montrent qu’elles peuvent toutes être décrites par un modèle mathématique unique et partagé de la précision.
Un triangle qui explique la précision
En remaniant des formules antérieures, les auteurs découvrent une relation simple de triangle rectangle entre les trois méthodes. Lorsqu’on exprime la précision en termes d’écart-type de la profondeur, les inverses des précisions des méthodes verticale et horizontale forment les deux côtés courts d’un triangle rectangle, tandis que l’inverse de la précision de la méthode à bandes inclinées forme l’hypoténuse. Cela signifie que la méthode à bandes inclinées offre toujours la meilleure précision pour une géométrie système donnée, tandis que les versions verticale et horizontale peuvent être vues comme des cas particuliers plus simples et légèrement moins précis qui n’exploitent qu’une partie du levier géométrique disponible entre la caméra et le projecteur.
Transformer une géométrie de caméra complexe en règles de conception simples
Le modèle complet de précision dépend de nombreux paramètres de la caméra et du projecteur difficiles à appréhender lors de la conception d’un système réel. Pour le rendre pratique, les auteurs le simplifient en deux étapes principales. D’abord, ils considèrent une configuration courante où la direction de projection est perpendiculaire à la ligne reliant la caméra et le projecteur. Dans ce cas, une « ligne de base effective » peut être définie, qui combine l’espacement physique et les distances focales en une longueur unique. Les trois méthodes forment alors un autre triangle rectangle, cette fois en termes de ces lignes de base effectives : plus cette longueur est grande, meilleure est la précision de profondeur. Ensuite, ils isolent l’angle simple entre les directions de visée de la caméra et du projecteur et montrent que la précision varie principalement comme le carré de la distance à l’objet, inversement proportionnelle à la ligne de base effective et à un cosinus de cet angle. Cela donne aux concepteurs un levier géométrique direct.
Mise en relation avec la vision stéréo et la télémétrie laser
Parce que tous ces systèmes reposent sur la triangulation, les auteurs comparent leurs formules de précision à celles utilisées dans les dispositifs stéréo et les capteurs de triangulation laser. Après simplifications appropriées, les expressions coïncident : la projection de franges avec des bandes inclinées optimales se comporte, au niveau de la précision, comme une paire de caméras stéréo avec la même ligne de base, et partage la même dépendance à l’angle de visée que les systèmes basés sur le laser. Ce lien quantitatif appuie l’idée de longue date selon laquelle ces méthodes sont différentes manifestations d’un même principe géométrique, variant principalement par la façon dont elles trouvent les correspondances et par la manière dont le bruit affecte les mesures.
Outils de conception pour des mesures réelles
Pour passer de la théorie à la pratique, les auteurs analysent la sensibilité de la précision aux choix de conception tels que la distance de travail, la longueur de la ligne de base, la période des bandes et le bruit de la caméra. Ils montrent comment fixer des objectifs de conception plus stricts pour que les systèmes réels atteignent la précision requise malgré les imperfections. À partir du modèle simplifié, ils développent un outil logiciel appelé FPP-Planner qui permet aux ingénieurs de spécifier une précision désirée et une distance de mesure, puis de proposer des espacements caméra–projecteur, des angles de vue et des réglages de motif adaptés. Des expériences sur plans et sphères démontrent que la précision prédite correspond généralement à la performance mesurée à quelques pourcents près, confirmant que ces modèles peuvent guider de manière fiable la conception de systèmes de mesure 3D très précis.
Pourquoi cela importe pour la fabrication de haute technologie
En termes simples, cet article explique comment prédire la « netteté » d’un système optique de mesure 3D avant sa construction, et comment ajuster sa configuration pour atteindre un niveau de détail donné. En unifiant trois variantes courantes de projection de bandes dans un même cadre et en les reliant à d’autres méthodes de triangulation, les auteurs offrent une carte claire pour choisir entre simplicité et précision maximale. Pour les industries exigeant des tolérances toujours plus strictes, de la fabrication de semi‑conducteurs aux procédés avancés, ces résultats fournissent une recette pratique pour concevoir des scanners 3D à bandes qui respectent de façon fiable un budget de précision déterminé.
Citation: Lv, S., Huang, N., Zou, Y. et al. On the precision models of fringe projection profilometry: unification, simplification and connection. Light Sci Appl 15, 232 (2026). https://doi.org/10.1038/s41377-026-02300-x
Mots-clés: profilométrie par projection de franges, mesure de forme 3D, métrologie optique, vision stéréo, triangulation laser