Clear Sky Science · pt
Sobre os modelos de precisão da profilometria por projeção de franjas: unificação, simplificação e conexão
Vendo a forma com faixas de luz
De reconhecimento facial em telefones a inspeção da uniformidade de peças de motores a jato, muitas tecnologias dependem de medir formas 3D com grande precisão. Este artigo examina um dos métodos ópticos mais precisos para isso, chamado profilometria por projeção de franjas, e mostra como prever e melhorar sua precisão de forma clara e unificada.
Como padrões de franjas revelam a forma 3D
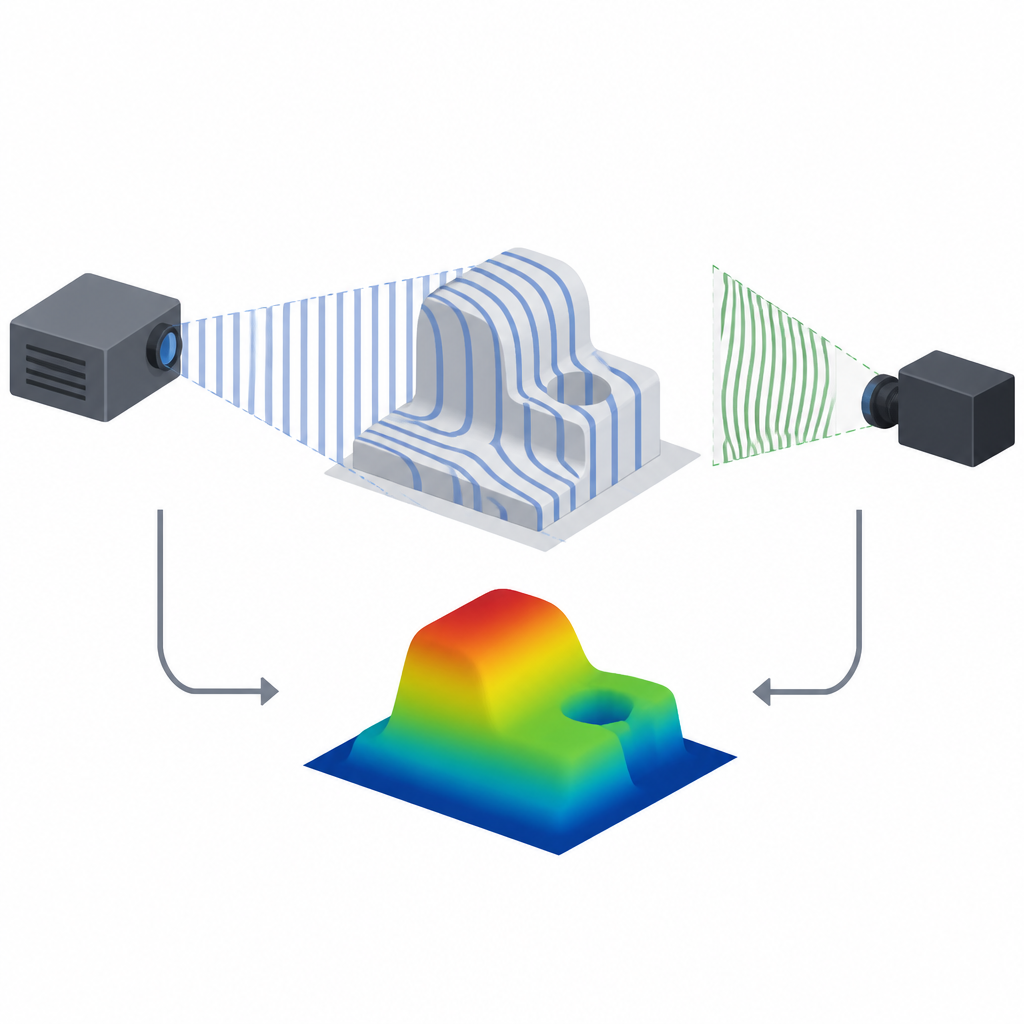
A profilometria por projeção de franjas funciona um pouco como projetar faixas regularmente espaçadas sobre um objeto e observar como essas faixas se curvam. Um projetor envia padrões de luz retos, enquanto uma câmera registra como a superfície do objeto os deforma. Ao relacionar cada pixel da câmera a um pixel correspondente do projetor, um computador pode usar geometria simples para reconstruir a posição 3D de pontos na superfície do objeto. Isso transforma luz e sombra em um mapa de profundidade altamente detalhado, frequentemente com precisão de poucos micrômetros, cobrindo desde pequenos componentes até peças mecânicas maiores.
Três maneiras de olhar o mesmo objeto
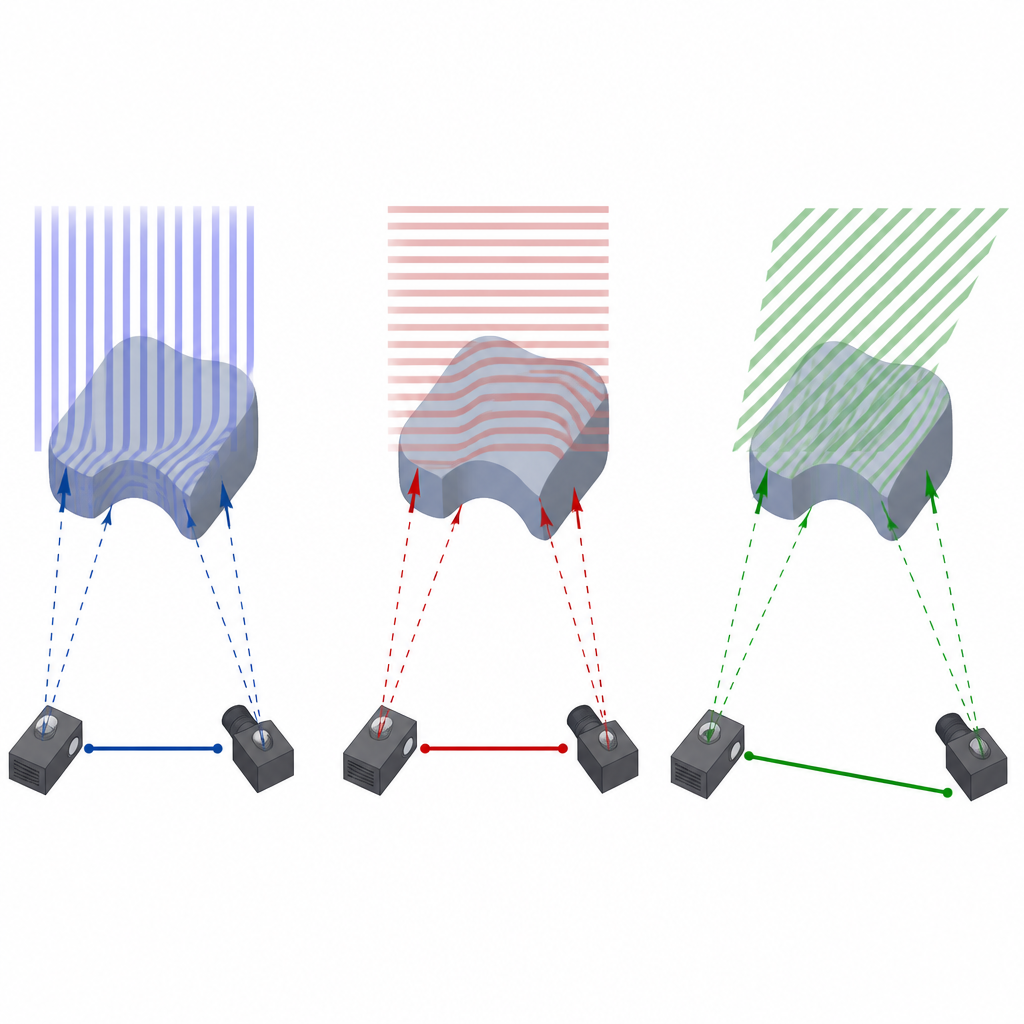
Os engenheiros podem escolher diferentes direções para as franjas projetadas, e essa escolha afeta quão precisa é a medição da profundidade. O artigo foca em três configurações populares. Na primeira, são projetadas franjas verticais, e o sistema usa principalmente informação na direção horizontal. Na segunda, usam-se franjas horizontais, aproveitando mais a informação vertical. O terceiro método emprega franjas em um ângulo inclinado escolhido com cuidado, ligado à geometria entre câmera e projetor. Embora essas técnicas pareçam diferentes na prática, os autores mostram que todas podem ser descritas por um único modelo matemático compartilhado de precisão.
Um triângulo que explica a precisão
Ao reorganizar fórmulas anteriores, os autores descobrem uma elegante relação de triângulo retângulo entre os três métodos. Quando a precisão é expressa em termos do desvio padrão da profundidade, os inversos das precisões dos métodos vertical e horizontal formam os dois lados curtos do triângulo retângulo, enquanto o inverso da precisão do método de franjas inclinadas constitui a hipotenusa. Isso significa que o método de franjas inclinadas sempre oferece a melhor precisão para uma geometria de sistema dada, enquanto as versões vertical e horizontal podem ser vistas como casos especiais mais simples e ligeiramente menos precisos que usam apenas parte da alavanca geométrica disponível entre câmera e projetor.
Transformando geometria complexa da câmera em regras de projeto simples
O modelo completo de precisão depende de muitos parâmetros da câmera e do projetor que são difíceis de manipular ao projetar um sistema real. Para torná‑lo prático, os autores simplificam em dois passos principais. Primeiro, consideram uma disposição comum em que a direção de visualização do projetor é perpendicular à linha que conecta câmera e projetor. Nesse caso, pode‑se definir uma “linha de base efetiva” que combina o espaçamento físico e as distâncias focais em um único comprimento. Os três métodos então formam outro triângulo retângulo, desta vez em termos dessas linhas de base efetivas: quanto maior esse comprimento, melhor a precisão de profundidade. Segundo, isolam o ângulo simples entre as direções de visualização da câmera e do projetor e mostram que a precisão escala principalmente com o quadrado da distância ao objeto, e inversamente com a linha de base efetiva e o cosseno desse ângulo. Isso fornece um controle geométrico direto para os projetistas de sistemas.
Ligando à visão estéreo e à medição por laser
Por dependerem todas de triangulação, os autores comparam suas fórmulas de precisão com as usadas em sistemas estéreo de câmeras e sensores de triangulação a laser. Após simplificações apropriadas, as expressões se alinham: a projeção de franjas com ângulo otimizado comporta‑se, no nível de precisão, como um sistema estéreo de duas câmeras com a mesma linha de base, e compartilha a mesma dependência do ângulo de visualização encontrada em sistemas a laser. Esse vínculo quantitativo sustenta a visão de longa data de que esses métodos são faces diferentes do mesmo princípio geométrico, diferenciando‑se principalmente em como encontram pontos correspondentes e em como o ruído entra nas medições.
Ferramentas de projeto para medições no mundo real
Para passar da teoria à prática, os autores analisam quão sensível é a precisão a escolhas de projeto, como distância de trabalho, comprimento da linha de base, período das franjas e ruído da câmera. Eles mostram como definir metas de projeto mais rigorosas para que sistemas reais ainda atinjam a precisão requerida apesar de imperfeições. Com base no modelo simplificado, criam uma ferramenta de software chamada FPP‑Planner que permite aos engenheiros especificar uma precisão desejada e a distância de medição, sugerindo então espaçamento apropriado câmera–projetor, ângulos de visualização e configurações de padrão. Experimentos com planos e esferas demonstram que a precisão prevista normalmente coincide com o desempenho medido dentro de alguns porcentos, confirmando que esses modelos podem orientar de forma confiável o projeto de sistemas de medição 3D de alta precisão.
Por que isso importa para a manufatura de alta tecnologia
Em termos práticos, este artigo explica como prever o quão “nítido” será um sistema óptico de medição 3D antes de sua construção e como ajustar sua configuração para alcançar um nível desejado de detalhe. Ao unificar três variantes comuns de projeção de franjas em um único quadro e vinculá‑las a outros métodos de triangulação, os autores fornecem um mapa claro para escolher entre simplicidade e máxima precisão. Para indústrias que exigem tolerâncias cada vez mais apertadas, da fabricação de semicondutores à manufatura avançada, esses resultados oferecem uma receita prática para projetar scanners 3D baseados em franjas que atendam de forma confiável a um orçamento de precisão determinado.
Citação: Lv, S., Huang, N., Zou, Y. et al. On the precision models of fringe projection profilometry: unification, simplification and connection. Light Sci Appl 15, 232 (2026). https://doi.org/10.1038/s41377-026-02300-x
Palavras-chave: profilometria por projeção de franjas, medição de forma 3D, metrologia óptica, visão estereoscópica, triangulação a laser