Clear Sky Science · ru
О моделях точности в профилометрии методом проекции френжей: унификация, упрощение и связь
Видеть форму через полосы света
От распознавания лиц в телефонах до проверки гладкости деталей турбин — многие технологии опираются на измерение 3D‑форм с высокой точностью. В этой статье детально рассматривается один из наиболее точных оптических методов — профилометрия методом проекции френжей — и показано, как ясно и единообразно предсказывать и улучшать его точность.
Как рисунок полос раскрывает 3D‑форму
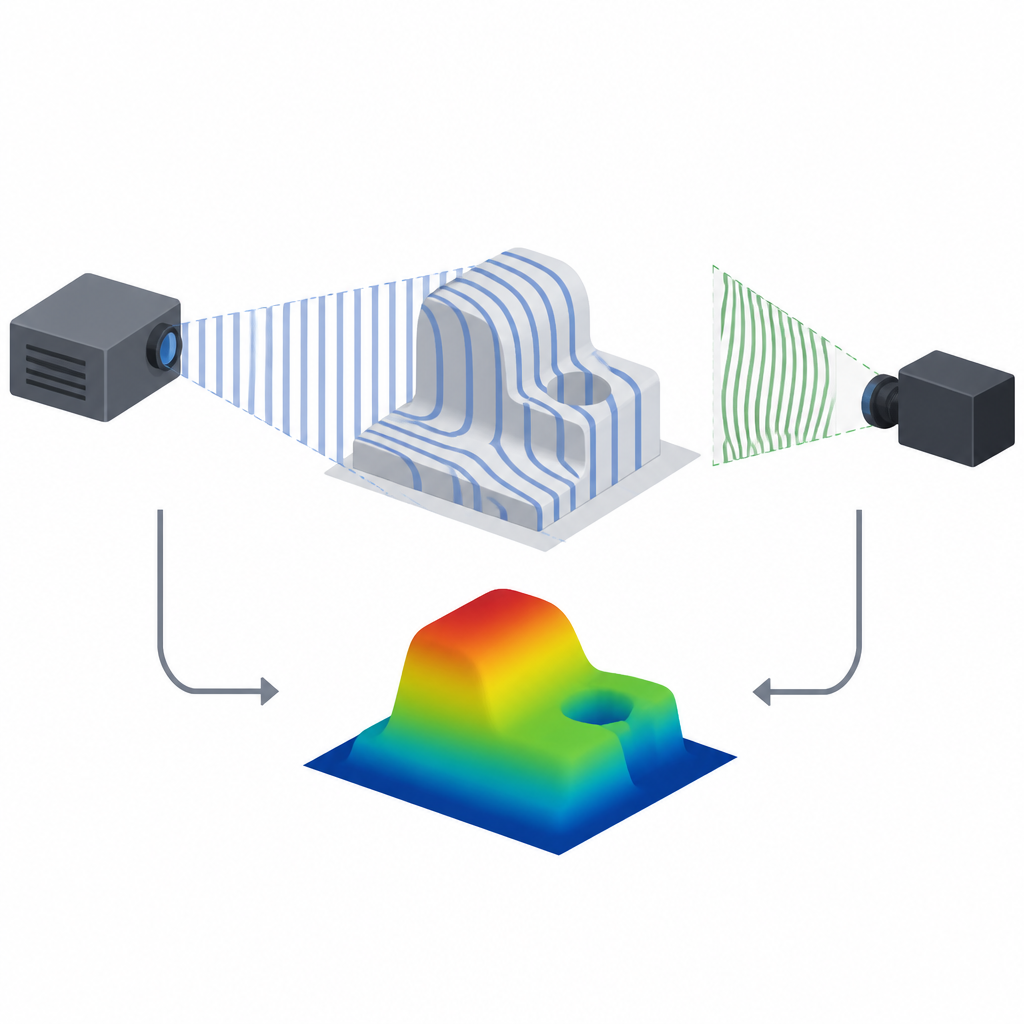
Профилометрия методом проекции френжей работает по принципу проецирования равномерно расположенных полос на объект и наблюдения, как эти полосы изгибаются. Проектор посылает прямые световые шаблоны, а камера фиксирует, как поверхность объекта их искажает. Сопоставляя каждый пиксель камеры с соответствующим пикселем проектора, вычислительная система может с помощью простой геометрии восстановить 3D‑координаты точек на поверхности. Так свет и тени превращаются в детальную карту глубины, часто с точностью до нескольких микрометров на областях от мелких компонентов до крупных механических деталей.
Три способа взглянуть на один и тот же объект
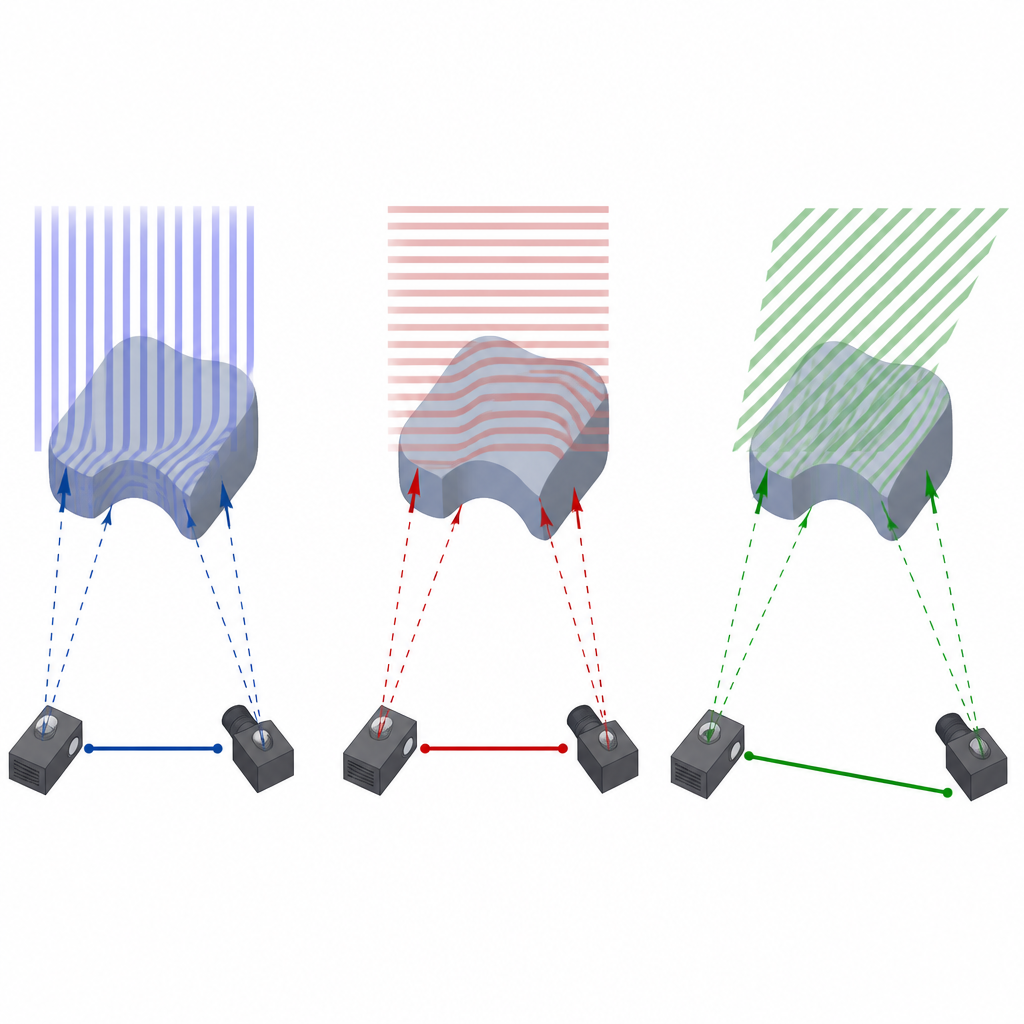
Инженеры могут выбирать разные направления проецируемых полос, и этот выбор влияет на точность измерения глубины. В статье рассматриваются три популярных варианта. В первом проецируют вертикальные полосы, и система в основном использует информацию по горизонтали. Во втором используются горизонтальные полосы, опираясь на вертикальную информацию. Третий метод применяет полосы под тщательно подобранным наклоном, связанным с геометрией между камерой и проектором. Хотя эти способы выглядят по‑разному на практике, авторы показывают, что их можно описать одной общей математической моделью точности.
Треугольник, объясняющий точность
Переписав ранние формулы, авторы обнаруживают аккуратное отношение прямоугольного треугольника между тремя методами. Если выразить точность через стандартное отклонение глубины, то обратные значения точности вертикального и горизонтального методов образуют два катета прямоугольного треугольника, а обратная величина точности метода со скошенными полосами составляет гипотенузу. Это означает, что метод со скошенными полосами всегда обеспечивает наилучшую точность для данной геометрии системы, а вертикальная и горизонтальная версии могут рассматриваться как более простые, чуть менее точные частные случаи, использующие только часть доступного геометрического преимущества между камерой и проектором.
Преобразование сложной геометрии камер в простые правила проектирования
Полная модель точности зависит от множества параметров камеры и проектора, которые трудно учитывать при реальной сборке системы. Чтобы сделать модель практичной, авторы упрощают её двумя основными шагами. Сначала они рассматривают распространённую компоновку, в которой направление проектора перпендикулярно линии, соединяющей камеру и проектор. В этом случае можно ввести «эффективную базу», объединяющую физическое расстояние и фокусные расстояния в одну длину. Тогда три метода формируют ещё один прямоугольный треугольник, уже в терминах этих эффективных баз: чем больше эта длина, тем лучше точность по глубине. Во втором шаге авторы выделяют простой угол между направлениями обзора камеры и проектора и показывают, что точность в основном масштабируется как квадрат расстояния до объекта и обратно пропорциональна эффективной базе и косинусу этого угла. Это даёт прямой геометрический инструмент для инженеров‑проектировщиков.
Связь со стереозрением и лазерной дальнометрией
Поскольку все эти системы опираются на триангуляцию, авторы сравнивают свои формулы точности с теми, что используются в стереокамерных установках и лазерных триангуляционных датчиках. После соответствующих упрощений выражения совпадают: проекция френжей с оптимально наклонёнными полосами ведёт себя, на уровне точности, как стереопара из двух камер с той же базой, и разделяет ту же зависимость от угла обзора, что и лазерные системы. Эта количественная связь подтверждает давнее представление о том, что эти методы — разные проявления одного геометрического принципа, различающиеся главным образом способами поиска соответствий и тем, как шум влияет на измерения.
Инструменты проектирования для реальных измерений
Чтобы перейти от теории к практике, авторы анализируют чувствительность точности к проектным решениям, таким как рабочее расстояние, длина базы, период полос и шум камеры. Они показывают, как задать более строгие требования к дизайну, чтобы реальные системы сохраняли требуемую точность несмотря на несовершенства. На основе упрощённой модели они разработали программный инструмент FPP‑Planner, который позволяет инженерам задать требуемую точность и расстояние измерения, а затем предлагает подходящее расстояние между камерой и проектором, углы обзора и настройки шаблона. Эксперименты с плоскостями и сферами показывают, что предсказанная точность обычно совпадает с измеренной в пределах нескольких процентов, что подтверждает способность моделей надёжно направлять проектирование высокоточных 3D‑систем измерения.
Почему это важно для высокотехнологичного производства
Проще говоря, эта работа объясняет, как предсказать «резкость» 3D‑оптической измерительной системы до её сборки и как настроить её компоновку для достижения требуемого уровня детализации. Объединив три распространённые вариации проекции полос в одну концепцию и связав их с другими методами триангуляции, авторы дают ясную карту выбора между простотой и максимальной точностью. Для отраслей, требующих всё более жестких допусков — от производства полупроводников до передового машиностроения — эти результаты предлагают практический рецепт проектирования полосовых 3D‑сканеров, которые надёжно укладываются в заданный бюджет точности.
Цитирование: Lv, S., Huang, N., Zou, Y. et al. On the precision models of fringe projection profilometry: unification, simplification and connection. Light Sci Appl 15, 232 (2026). https://doi.org/10.1038/s41377-026-02300-x
Ключевые слова: профилометрия методом проекции френжей, измерение 3D‑форм, оптическая метрология, стереозрение, лазерная триангуляция