Clear Sky Science · tr
Diferansiyel tahrikli robotların hassas yol takibi için Lyapunov tabanlı backstepping ve nöro‑bulanık mantığın kayma modu kontrolü ile entegrasyonu
Güzergâhından Ayrılmayan Robotlar
Depo toplayıcılarından gezegen keşif araçlarına kadar birçok robot, akülü bir tekerlekli sandalyeye benzeyen iki tahrikli tekerlek üzerinde hareket eder. Bu makinelerin santimetre düzeyinde hassasiyetle bir yolu izlemesini sağlamak göründüğünden daha zordur: zeminler düzensizdir, tekerlekler kayar, motorlar doyuma uğrar ve robotun mekanik yapısı karmaşıktır. Bu makale, böyle robotlar için yeni bir beyin sunuyor—Sabit Ultra‑Hibrit Uyarlanabilir Denetleyici (FUHAC) adını verdikleri bir kontrol şeması—iki tekerlekli bir robotu planlanan rotasına yapıştıracak şekilde tasarlanmış, çevre karışık ve değişken olsa bile çalışacak şekilde.
İki Tekerleği Yönlendirmenin Neden Bu Kadar Zor Olduğu
Diferansiyel tahrikli mobil robotlar, sol ve sağ tekerleklerini farklı hızlarda döndürerek yönlenir. Bu basit düzen zor fiziği gizler. Robot yana doğru hareket edemez, kütle merkezi merkezden kaymış olabilir ve sürtünme, tümsekler ile bilinmeyen yükler sürekli olarak onu rotasından saptırır. PID gibi klasik denetleyiciler veya tek yönteme dayalı daha ileri şemalar yalnızca dar koşullarda iyi çalışır: hafif eğrilerde düzgün takip edebilirler ama keskin dönüşler, ani itme kuvvetleri veya kusurlu modellerle başa çıkmakta zorlanırlar. Araştırmacılar öğrenme modülleri, bulanık mantık veya sağlam kontrol katmanları eklemeyi denediler, ancak bu hibritler genellikle parçaları rastgele birleştirir ve bütünün kararlı kalacağına dair sağlam bir garanti sunmaz.
Birden Fazla Beyni Birleştirmek
Yazarlar, her biri problemin farklı bir yönünü ele alan dört farklı kontrol fikrini kasıtlı olarak birleştiren birleşik bir mimari olarak FUHAC'ı öneriyor. Bir backstepping çekirdeği, kuramsal olarak robotu istenen yola yaklaştıran düzgün, model‑tabanlı bir yönlendirme sağlar. Bir nöro‑bulanık modül bu temel üzerine oturur ve robotun takip hatasının nasıl geliştiğini gözlemleyerek modellenmemiş sürtünme veya küçük mekanik kusurlar gibi bilinmeyen etkileri iptal etmeyi öğrenir. Bir kayma modu katmanı, daha büyük bozulmalara hızlı tepki veren ve sınırlı itmeleri ile darbeleri sonlu zamanda reddedebileceğini garanti eden sert, koruyucu bir kabuk ekler. Son olarak bir bozulma gözlemcisi robotun hareketini izler ve üzerine etki eden dış kuvvetleri çıkarım yoluyla tahmin eder, böylece denetleyici yalnızca sonradan tepki vermek yerine bunlara proaktif olarak karşı koyabilir. Bu öğeleri sabit ağırlıklarla karıştırmak yerine FUHAC, takip hatasının büyüklüğüne ve salınımlı doğasına göre bunların etkisini gerçek zamanlı olarak kaydıran performans‑tabanlı bir harmanlama faktörü kullanır.
Hızlı Tepkiler, Yavaş Öğrenme
FUHAC'taki önemli yeniliklerden biri, hızlı refleksleri daha yavaş stratejik ayarlardan ayırma biçimidir. Denetleyici iki uyarlama saatini çalıştırır: ani sapmaları ve salınımları bastırmak için her 30 milisaniyede bir güncellenen hızlı döngü ve uzun vadeli doğruluk ile enerji verimliliği için parametreleri kademeli olarak ayarlayan her 150 milisaniyede bir güncellenen daha yavaş döngü. Bu çift‑zaman ölçekli düzen, robotun hızlı hareketle uğraşırken yavaş parametreleri neredeyse sabit olarak hissetmesini sağlamak üzere kontrol teorisindeki zaman‑ölçeği ayrımından esinlenmiştir. Her şeyi matematiksel olarak kontrol altında tutmak için yazarlar, takip hatalarını, öğrenme hatalarını, kayma davranışını ve bozulma‑gözlemci hatalarını aynı anda yakalayan tek bir enerji‑benzeri fonksiyon (Lyapunov fonksiyonu) kurarlar. Ardından makul varsayımlar altında bu enerjinin yalnızca azalabileceğini veya sabitlenebileceğini gösterirler; bu da robotun rotadan sapmasının sınırlı kaldığı ve eğer yaklaşık hata ve bozulmalar zayıflarsa zamanla yok olabileceği anlamına gelir.
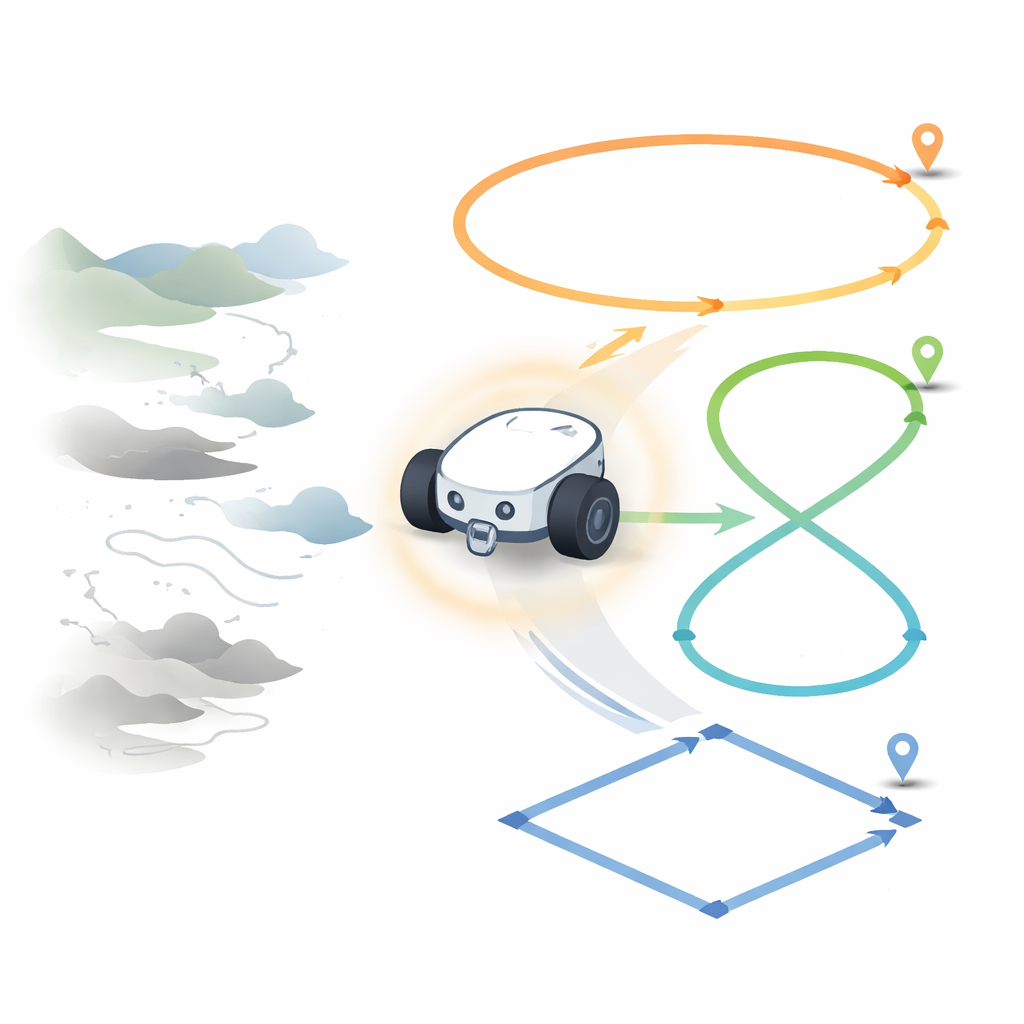
Denetleyiciyi Test Etmek
FUHAC'ın nasıl davrandığını görmek için ekip üç kıyas yol üzerinde simülasyonlar çalıştırdı: sekiz biçimi, bir daire ve keskin köşeli bir elmas. Bu eğriler hareketin farklı yönlerini sınar: sürekli eğrilik, eğrilik terslenmesi ve ani yön değişimleri. Tüm durumlarda son konum hatası 4 santimetrenin altında kaldı, kümülatif hata indeksleri küçük ve ortalama motor torku 10 newton‑metrenin altında mütevazı düzeydeydi. Denetleyici yaklaşık 12,7 saniyede yakın‑sabit takibe yerleşti ve salınımları dar bir bant içinde tuttu; uyarlanabilir kayma kazancı, enerji israf etmeden sağlamlığı koruyacak kadar arttı. Standart PID, saf backstepping ve saf kayma modu yaklaşımlarıyla karşılaştırıldığında FUHAC doğruluğu yakaladı ya da geçti ve aktüatörleri yıpratabilecek yüksek frekanslı "cıvıltıyı" (chatter) dramatik şekilde azalttı. Yazarlar ayrıca yöntemi gerçek bir Pioneer robotundan kaydedilmiş veriler üzerinde denediler. Burada tekerlek kayması ve motor doyumu gibi modellenmemiş etkiler hataları santimetre yerine metre mertebesine çıkarırken bile kapalı çevrim kararlı kaldı ve agresif manevralardan sonra toparlandı; bu da çerçevenin sağlamlığını vurguluyor.
Günlük Robotlar İçin Anlamı
FUHAC, dikkatle orkestre edilmiş "çok‑beyinli" kontrolün tekerlekli robotlara hem hassasiyet hem de dayanıklılık kazandırabileceğini gösteriyor. Düzgün model‑tabanlı yönlendirmeyi, öğrenme‑tabanlı telafiyi, sağlam korumayı ve bozulma tahminini tek bir kararlılık ispatı altında birleştirerek yöntem, deneme‑yanılma hibritlerinin ötesine, ilkelere dayalı tasarıma doğru bir adım atıyor. Pratikte bu, zemin robotlarının, yardımcı tekerlekli sandalyelerin ve denetim platformlarının dar yolları alt‑desimetre hassasiyetle takip etmesine; ılımlı enerji tüketimiyle tümsekler, gürültü ve değişen yükleri tolere etmesine yardımcı olabilir. Çok sayıda parametresinin ayarlanması basit bir PID'e göre daha karmaşık olsa da denetleyici modern gömülü işlemciler için hesaplama açısından yeterince hafif kalıyor. Yazarlar, FUHAC'ı görüntüleme, haritalama ve hatta derin pekiştirmeli öğrenme ile birleşecek gelecekteki sistemler için bir temel olarak görüyor; gerçek dünya ortamlarında daha güvenilir, akıllı mobil robotlara giden yolu açıyor.
Atıf: Xu, P., Maghsoudniazi, M. & Maghsoudniazi, Y. Integrating Lyapunov based backstepping and neuro fuzzy logic with sliding mode control for precise trajectory tracking of differential drive robots. Sci Rep 16, 11961 (2026). https://doi.org/10.1038/s41598-026-39667-1
Anahtar kelimeler: mobil robot kontrolü, yol takibi, uyarlanabilir hibrit denetleyici, diferansiyel tahrikli robotlar, bozulma reddi