Clear Sky Science · sv
Integration av Lyapunov‑baserad backstepping och neuro‑fuzzy‑logik med sliding‑mode‑styrning för precis banföljning hos differentialdrivna robotar
Robotar som håller sig på banan
Från lagerplockare till planetrovers rör sig många robotar på två drivna hjul, ungefär som en elektrisk rullstol. Att få dessa maskiner att följa en bana med centimeterprecision är svårare än det verkar: golv är ojämna, hjul slirar, motorer når mätningstak, och robotens egen mekanik är komplex. Denna artikel presenterar en ny "hjärna" för sådana robotar — en styrningsmetod kallad Fixed Ultra‑Hybrid Adaptive Controller (FUHAC) — utformad för att hålla en tvåhjulsrobot fast vid sin planerade rutt även när omvärlden är rörig och föränderlig.
Varför styrning på två hjul är så svårt
Differentialdrivna mobila robotar styrs genom att vänster och höger hjul snurrar i olika hastigheter. Denna enkla uppbyggnad döljer svåra fysikaliska problem. Robotens sidoförflyttning är begränsad, tyngdpunkten kan ligga ocentrerat, och friktion, gupp och okända belastningar förskjuter den ständigt från kursen. Klassiska regulatorer som PID eller mer avancerade enskilda metoder fungerar väl bara under snäva förhållanden: de kan följa mjuka kurvor men får problem med skarpa svängar, plötsliga stötar eller ofullständiga modeller. Forskare har försökt lägga till inlärningsmoduler, fuzzylogik eller robusta kontrolllager, men dessa hybrider fogas ofta ihop ad hoc utan garantier för att hela systemet förblir stabilt.
Att förena flera styrprinciper till en
Författarna föreslår FUHAC som en enhetlig arkitektur som avsiktligt kombinerar fyra olika kontrollidéer, där varje del tar hand om olika aspekter av problemet. En backstepping‑kärna ger mjuk, modellbaserad styrning som i teorin leder roboten mot önskad bana. En neuro‑fuzzy‑modul ligger ovanpå denna bas och lär sig att kompensera för okända effekter — såsom omodellerad friktion eller små mekaniska egenheter — genom att observera hur robotens följsamhetsfel utvecklas. Ett sliding‑mode‑lager lägger till ett robust, skyddande skal som reagerar snabbt vid större störningar och garanterar att begränsade påfrestningar och ryck kan avvisas på ändlig tid. Slutligen bevakar en störningsobservatör robotens rörelse och härleder de externa krafter som verkar på den, så att regulatorn kan motverka dem proaktivt istället för bara reagera i efterhand. Istället för att blanda dessa element med fasta vikter använder FUHAC en prestandabaserad blandningsfaktor som flyttar inflytande mellan dem i realtid, beroende på hur stort och hur oscillativt följsamhetsfelet är.
Snabba reaktioner, långsam inlärning
En viktig innovation i FUHAC är hur den separerar snabba reflexer från långsammare, strategiska justeringar. Regulatorn kör två anpassningsklockor: en snabb slinga, uppdaterad var 30:e millisekund, som finjusterar vinster för att dämpa plötsliga avvikelser och svängningar, och en långsammare slinga, uppdaterad var 150:e millisekund, som gradvis ställer in parametrar för långsiktig noggrannhet och energieffektivitet. Detta tvåtaktiga schema är valt så att roboten uppfattar de långsamma parametrarna som nästan konstanta medan den hanterar snabb rörelse, en princip inspirerad av tidsskalseparation i reglerteori. För att hålla allt matematiskt i schack konstruerar författarna en enda energiliknande funktion (en Lyapunov‑funktion) som fångar följsamhetsfel, inlärningsfel, sliding‑beteende och störningsobservatörsfel samtidigt. De visar sedan att, under rimliga antaganden, denna energi endast kan minska eller plana ut, vilket innebär att robotens avvikelse från banan förblir begränsad och, om approximationsfel och störningar avtar, till och med försvinner över tid.
Sätta regulatorn på prov
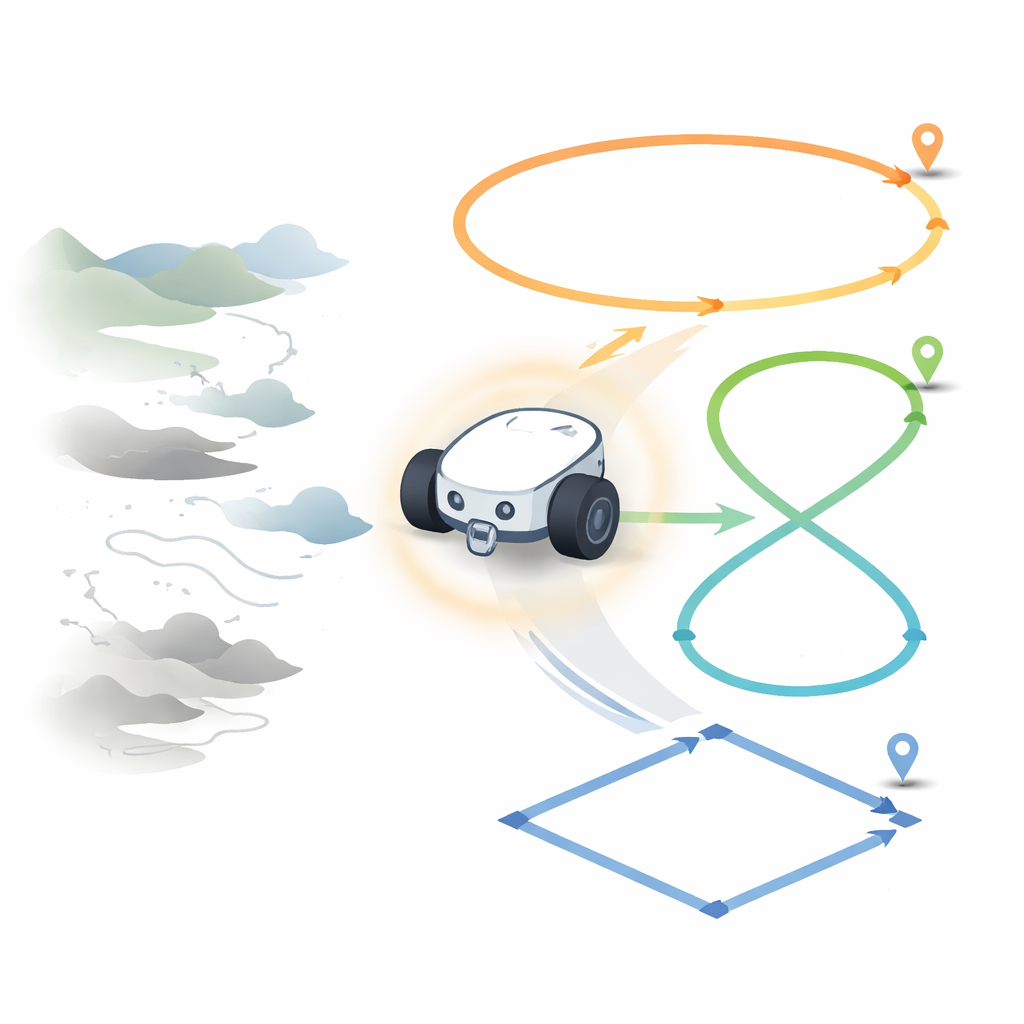
För att se hur FUHAC beter sig körde teamet simuleringar på tre referensbanor: en åtta‑figur, en cirkel och en diamant med skarpa hörn. Dessa kurvor belastar olika aspekter av rörelse: kontinuerlig krökning, krökningsvändning och plötsliga riktningsändringar. I samtliga fall höll slutpositionens fel sig under 4 centimeter, med små kumulativa felindex och måttligt medelmoment under 10 newtonmeter. Regulatorn stabiliserade sig till nära‑steady följsamhet på omkring 12,7 sekunder samtidigt som oscillationer hölls inom ett smalt band; dess adaptiva sliding‑vinst ökade precis så mycket att robusthet bibehölls utan att slösa energi. Jämfört med standard‑PID, ren backstepping och ren sliding‑mode matchade eller överträffade FUHAC deras noggrannhet samtidigt som den dramatiskt reducerade högfrekvent "chatter" som kan slita på aktuatorer. Författarna provade också metoden på inspelade data från en verklig Pioneer‑robot. Här gav omodellerade effekter som hjulslir och motorsaturering större fel — i storleksordningen meter snarare än centimeter — men slingan förblev stabil och återhämtade sig efter aggressiva manövrar, vilket understryker ramverkets robusthet.
Vad detta betyder för vardagsrobotar
FUHAC visar att noggrant orkestrerad "många‑hjärnors" kontroll kan ge hjulburna robotar både precision och motståndskraft. Genom att förena mjuk modellbaserad styrning, inlärningsbaserad kompensation, robust skydd och störningsuppskattning under ett enda stabilitetsbevis tar metoden ett steg bort från trial‑and‑error‑hybrider mot principfast design. I praktiken kan detta hjälpa golvrobotar, hjälpmedelsrullstolar och inspektionsplattformar att följa trånga banor med subdecimetersnoggrannhet samtidigt som de använder måttlig energi och tål gupp, brus och varierande laster. Även om justeringen av dess många parametrar är mer komplex än för en enkel PID förblir regulatorn beräkningsmässigt tillräckligt lätt för moderna inbyggda processorer. Författarna ser FUHAC som en grund för framtida system som integrerar sådan styrning med syn, kartläggning och till och med djup förstärkningsinlärning, vilket banar väg för mer pålitliga, intelligenta mobila robotar i verkliga miljöer.
Citering: Xu, P., Maghsoudniazi, M. & Maghsoudniazi, Y. Integrating Lyapunov based backstepping and neuro fuzzy logic with sliding mode control for precise trajectory tracking of differential drive robots. Sci Rep 16, 11961 (2026). https://doi.org/10.1038/s41598-026-39667-1
Nyckelord: styrning av mobila robotar, banföljning, adaptiv hybridkontroller, differentialdrivna robotar, störningsavvisning