Clear Sky Science · ru
Интеграция метода обратной подстановки на основе функции Ляпунова и нейро‑нечеткой логики со скользящим режимом управления для точного слежения за траекторией роботов с дифференциальным приводом
Роботы, которые не сходят с курса
От складских комплектаций до планетных роверов многие роботы передвигаются на двух ведущих колесах, как моторная инвалидная коляска. Заставить такие машины следовать маршруту с точностью до сантиметров сложнее, чем кажется: полы неровные, колеса пробуксовывают, двигатели насыщаются, а механика самого робота добавляет сложности. В этой статье предложен новый «мозг» для таких роботов — схема управления под названием Fixed Ultra‑Hybrid Adaptive Controller (FUHAC), спроектированная так, чтобы удерживать два колеса робота на запланированном пути даже в условиях беспорядка и изменчивости окружающей среды.
Почему управление двумя колесами так трудно
Дифференциальные мобильные роботы поворачивают, вращая левое и правое колесо с различными скоростями. Эта простая схема скрывает непростую физику. Робот не может двигаться вбок, центр массы может быть смещён, а трение, неровности и неизвестные нагрузки постоянно сбивают его с курса. Классические регуляторы, такие как PID, или даже более продвинутые однотипные схемы хорошо работают лишь в узких условиях: они могут плавно отслеживать мягкие кривые, но испытывают трудности при резких поворотах, внезапных толчках или при несовершенной модели. Исследователи пробовали добавлять модули обучения, нечеткую логику или уровни робустного управления, однако такие гибриды обычно собираются «на коленке» и не дают твёрдых гарантий устойчивости всей системы.
Смешение нескольких «мозгов» в одном
Авторы предлагают FUHAC как единый архитектурный подход, целенаправленно объединяющий четыре разных идеи управления, каждая из которых решает свою часть задачи. Ядро на основе обратной подстановки обеспечивает плавное, модель‑зависимое руление, которое в теории возвращает робота на желаемую траекторию. Нейро‑нечеткий модуль располагается поверх этой основы и обучается компенсировать неизвестные эффекты — такие как немоделированное трение или мелкие механические особенности — наблюдая за эволюцией ошибки слежения. Слой скользящего режима добавляет жёсткую защитную оболочку, быстро реагирующую на крупные возмущения и гарантирующую, что ограниченные толчки и порывы будут подавлены за конечное время. Наконец, наблюдатель возмущений следит за движением робота и оценивает внешние силы, действующие на него, чтобы контроллер мог проактивно противодействовать им, а не просто реагировать постфактум. Вместо смешивания этих элементов с фиксированными весами FUHAC использует фактор слияния, основанный на производительности: он в реальном времени смещает влияние между компонентами в зависимости от величины и осциллятивности ошибки слежения.
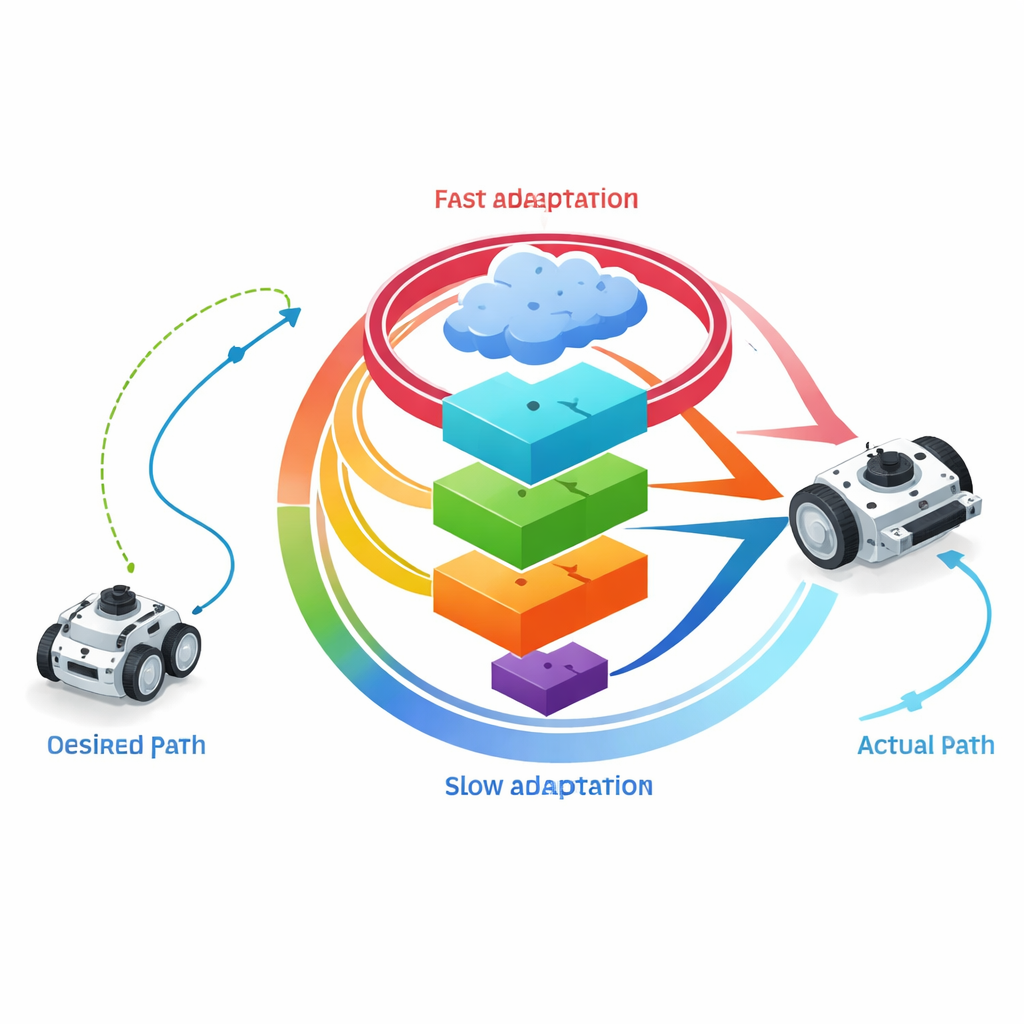
Быстрая реакция, медленное обучение
Ключевая инновация FUHAC — это разделение быстрых рефлексов и более медленных стратегических корректировок. Контроллер работает с двумя циклами адаптации: быстрый цикл, обновляющийся каждые 30 миллисекунд, корректирует усиления для подавления внезапных отклонений и колебаний, и медленный цикл, обновляющийся каждые 150 миллисекунд, который постепенно настраивает параметры для долгосрочной точности и экономичности энергии. Такая двухскоростная схема выбрана так, чтобы робот воспринимал медленные параметры как почти постоянные во время быстрого движения — принцип, вдохновлённый разделением временных масштабов в теории управления. Чтобы держать всё под математическим контролем, авторы строят единую энерго‑подобную функцию (функцию Ляпунова), которая одновременно учитывает ошибки слежения, ошибки обучения, поведение скользящего режима и ошибки наблюдателя возмущений. Они затем показывают, что при разумных допущениях эта энергия может только уменьшаться или выравниваться, что означает ограниченность отклонения робота от траектории и, при затухании ошибок аппроксимации и возмущений, его исчезновение со временем.
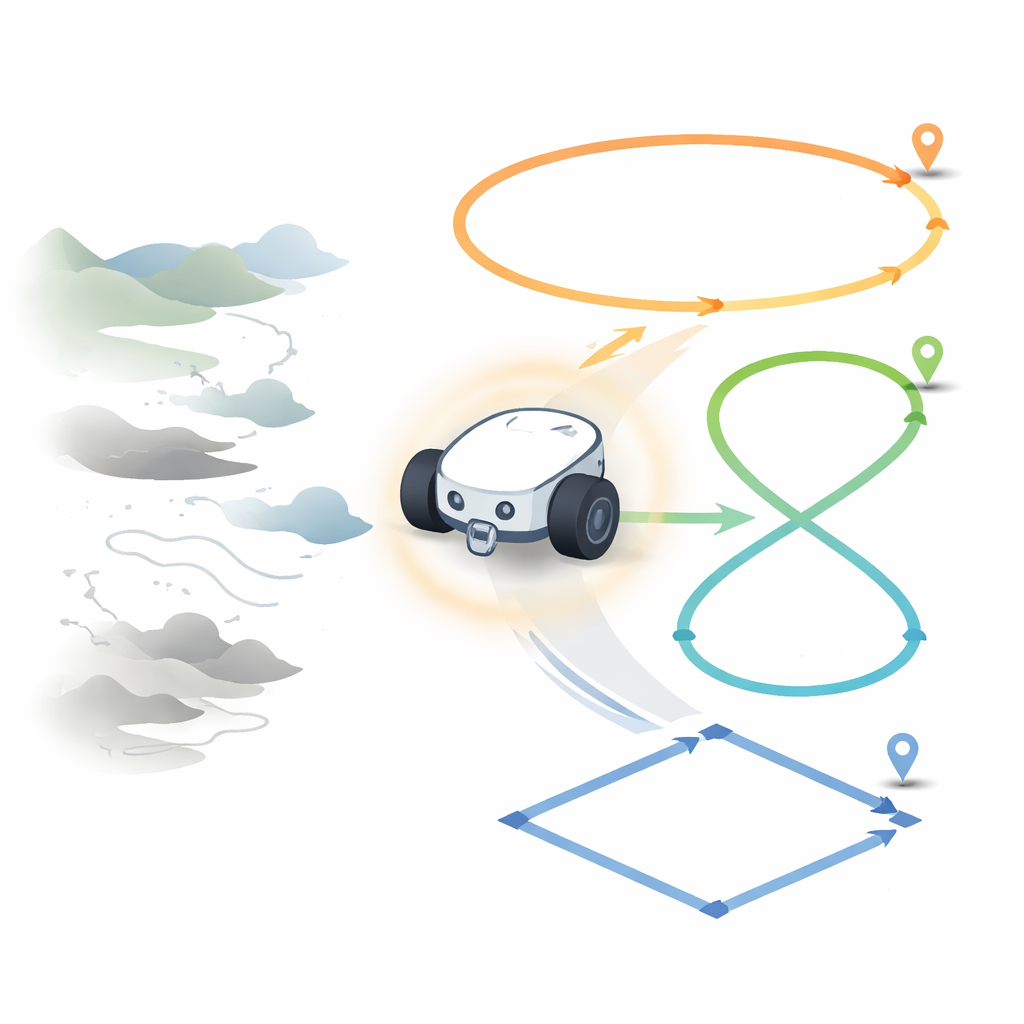
Испытания контроллера
Чтобы проверить поведение FUHAC, команда провела моделирование на трёх эталонных траекториях: «восьмерка», окружность и ромб с острыми углами. Эти кривые нагружают разные аспекты движения: плавная кривизна, смена кривизны и резкие изменения направления. Во всех случаях конечная погрешность положения оставалась ниже 4 сантиметров, с малыми интегральными индексами ошибок и умеренным средним крутящим моментом моторов ниже 10 ньютон‑метров. Контроллер выходил на близкое к установившемуся слежение примерно за 12,7 секунды, удерживая колебания в узком диапазоне; его адаптивное скользящее усиление увеличивалось ровно настолько, чтобы поддерживать робастность без излишних энергозатрат. В сравнении со стандартным PID, чистой схемой обратной подстановки и чистым скользящим режимом FUHAC сравнялся с ними или превзошёл по точности, одновременно существенно снижая высокочастотный «дребезг», изнашивающий приводы. Авторы также опробовали метод на записанных данных реального робота Pioneer. Здесь немоделированные эффекты, такие как пробуксовка колёс и насыщение моторов, вызвали большие ошибки — порядка метров вместо сантиметров — но замкнутая система оставалась устойчива и восстанавливалась после агрессивных манёвров, что подчёркивает робастность подхода.
Что это значит для повседневных роботов
FUHAC демонстрирует, что тщательно скоординированный «многомозговой» подход к управлению может дать колесным роботам и точность, и устойчивость. Объединив плавное модель‑зависимое руление, компенсацию на основе обучения, робастную защиту и оценку возмущений под одной теоремой устойчивости, метод выходит за рамки гибридов методом проб и ошибок и движется к принципиальному проектированию. На практике это может помочь уборочным роботам, вспомогательным инвалидным коляскам и инспекционным платформам следовать плотным траекториям с точностью до десятков сантиметров при умеренном энергопотреблении и терпимости к неровностям, шуму и меняющимся нагрузкам. Хотя настройка множества параметров сложнее, чем у простого PID, контроллер остаётся достаточно лёгким с вычислительной точки зрения для современных встроенных процессоров. Авторы рассматривают FUHAC как основу для будущих систем, которые объединят такой контроль с визуальным восприятием, картографированием и даже глубинным обучением с подкреплением, прокладывая путь к более надёжным и интеллектуальным мобильным роботам в реальных условиях.
Цитирование: Xu, P., Maghsoudniazi, M. & Maghsoudniazi, Y. Integrating Lyapunov based backstepping and neuro fuzzy logic with sliding mode control for precise trajectory tracking of differential drive robots. Sci Rep 16, 11961 (2026). https://doi.org/10.1038/s41598-026-39667-1
Ключевые слова: управление мобильным роботом, слежение за траекторией, адаптивный гибридный регулятор, роботы с дифференциальным приводом, подавление возмущений