Clear Sky Science · ja
微分走行ロボットの精密軌道追従のためのリャプノフ基づくバックステッピングとニューロファジィ論理の統合、及びスライディングモード制御
軌道を外れないロボット
倉庫のピッキングロボットから惑星探査機まで、多くのロボットは電動車いすのように二つの駆動輪で移動します。これらの機械をセンチメートル単位の精度で経路に沿わせるのは見た目より難しい――床は平坦でなく、車輪は滑り、モータは飽和し、ロボット自身の機構も厄介です。本論文は、この種のロボット向けに新しい“頭脳”を提案します。固定型超ハイブリッド適応コントローラ(FUHAC)と呼ばれる制御方式で、周囲が不確かで変化しても二輪ロボットを計画経路に張り付かせることを目指しています。
二輪を導くのがなぜ難しいのか
微分駆動のモバイルロボットは左右の車輪の回転差で舵取りをします。この単純な配置には難しい物理が隠れています。ロボットは横方向に移動できず、重心が偏ることもあり、摩擦や段差、不明な荷重が常に軌道から押し出します。PIDのような古典的な制御や単一手法の高度なスキームは限定的な条件でしか良く働きません:穏やかな曲線では滑らかに追従できても、急な旋回、突然の外力、モデルの不正確さには弱いことがあります。研究者たちは学習モジュール、ファジィ論理、ロバスト制御層を組み合わせる試みを行ってきましたが、これらのハイブリッドは多くの場合場当たり的に部品を貼り合わせたようになり、システム全体の安定性の確かな保証が欠けがちです。
複数の“頭脳”を一つに融合する
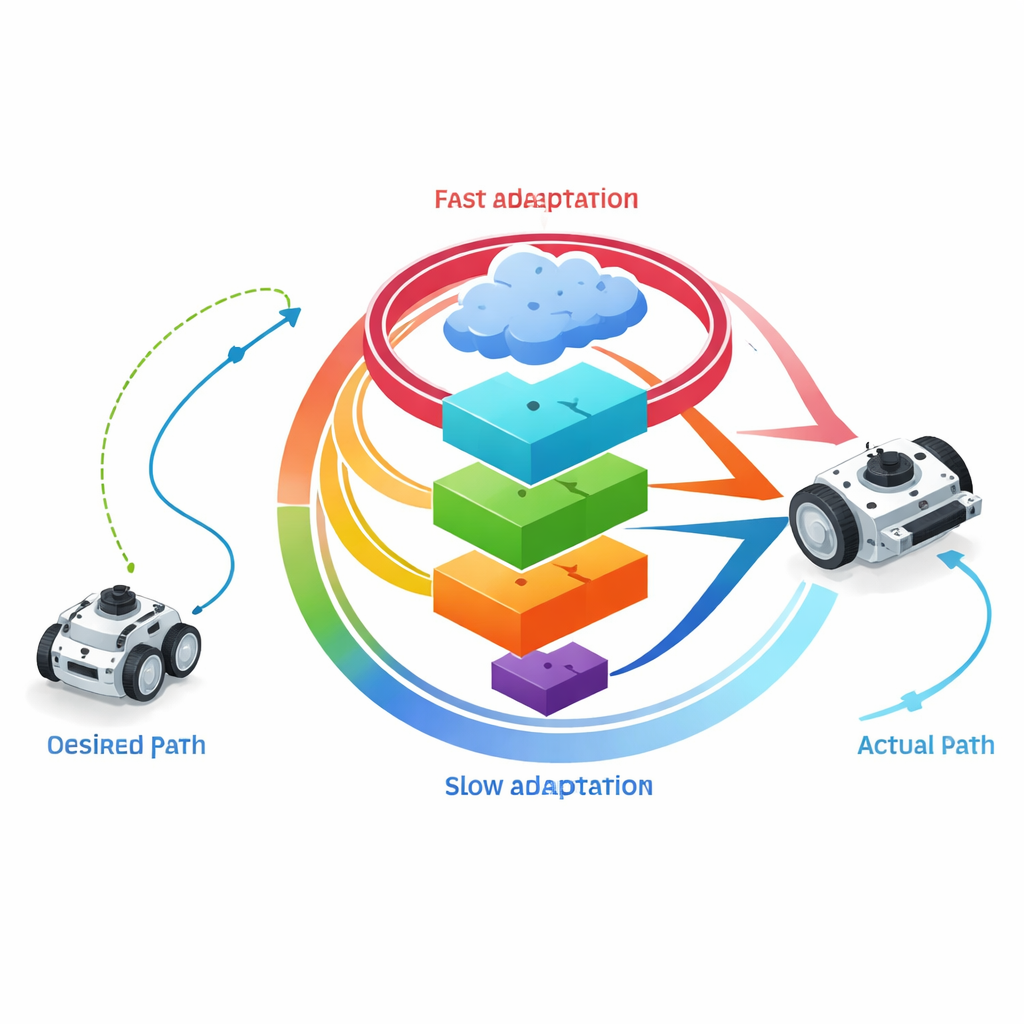
著者らはFUHACを四つの異なる制御アイデアを意図的に統合した統一アーキテクチャとして提案します。それぞれが問題の別の側面を扱います。バックステッピングの核は滑らかなモデルベースの舵取りを提供し、理論的にはロボットを望ましい経路へ導きます。ニューロファジィモジュールはこのベースラインの上に載り、追従誤差の変化を観測して、未モデル化の摩擦や小さな機械的特性などの未知の効果を打ち消すことを学習します。スライディングモード層は大きな撹乱に素早く反応する頑強な保護殻を追加し、有界な押しや突風を有限時間で拒絶することを保証します。最後に摂動観測器がロボットの運動を監視して外力を推定し、制御器が事後的に反応するだけでなく先手を打って対抗できるようにします。これらの要素を固定重みで混ぜ合わせる代わりに、FUHACは性能に基づくブレンド係数を用い、追従誤差の大きさや振動性に応じてリアルタイムに各要素の影響をシフトさせます。
高速反応と遅い学習
FUHACの重要な革新は、迅速な反射と遅い戦略的調整を分離する方法です。コントローラは二つの適応クロックを走らせます:30ミリ秒ごとに更新される高速ループは急激な偏差や振動を抑えるために利得を微調整し、150ミリ秒ごとの低速ループは長期的な精度とエネルギー効率のためにパラメータを徐々に最適化します。この二重速度スキームは、ロボットが高速運動に対処している間は遅いパラメータをほぼ固定と感じるように選ばれており、制御理論における時定数分離に着想を得ています。全体を数学的に整理するため、著者らは追従誤差、学習誤差、スライディング挙動、摂動観測器誤差を同時に捉える一つのエネルギー様関数(リャプノフ関数)を構成します。そして合理的な仮定の下で、このエネルギーは減少するか横ばいになるだけであることを示し、これはロボットの経路からの偏差が有界に保たれ、近似誤差と摂動が消えれば時間とともに消失することを意味します。
コントローラの試験
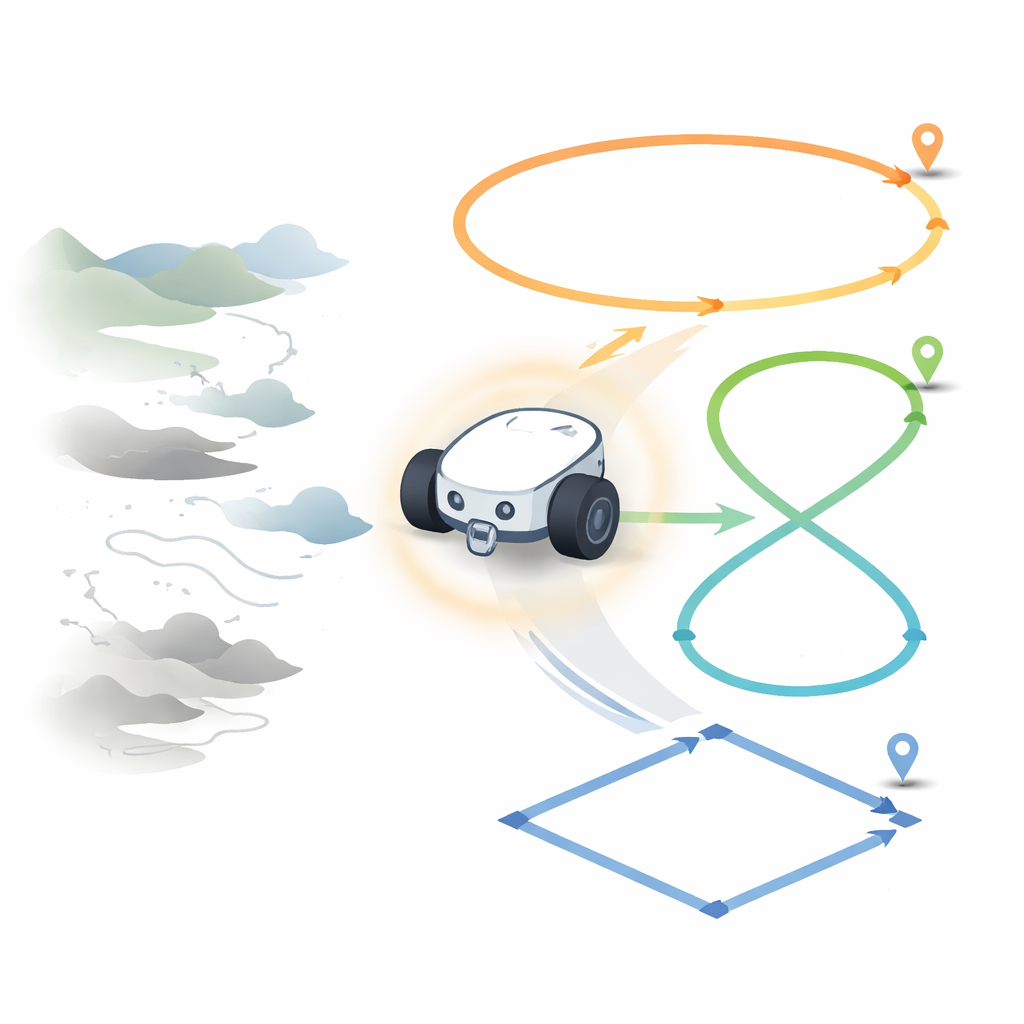
FUHACの挙動を確認するため、研究チームはフィギュア8、円、鋭角のダイヤモンドという三つのベンチマーク軌道でシミュレーションを行いました。これらの曲線は異なる運動の側面を試験します:連続する曲率、曲率の反転、急な方向変化です。いずれのケースでも最終的な位置誤差は4センチ未満に収まり、累積誤差指標は小さく、平均モータトルクは10ニュートンメートル以下に留まりました。コントローラは約12.7秒でほぼ定常追従に落ち着き、振動も狭い帯域に収めました;適応的なスライディング利得は、エネルギーを無駄にすることなく堅牢性を維持するのに十分だけ増加しました。標準的なPID、純バックステッピング、純スライディングモードと比較すると、FUHACは精度で匹敵またはそれを上回り、アクチュエータを摩耗させる高周波の“チャタ”を劇的に減らしました。著者らは実機のPioneerロボットの記録データでも手法を試しました。ここでは車輪のスリップやモータの飽和といった未モデル化効果により誤差はメートル単位と大きくなりましたが、閉ループは安定を保ち、激しい操舵後にも回復し、フレームワークの堅牢性を示しました。
日常的なロボットにとっての意義
FUHACは、注意深くオーケストレーションされた“多頭脳”制御が車輪型ロボットに精度と回復力の両方をもたらせることを示しています。滑らかなモデルベースの舵取り、学習に基づく補償、堅牢な保護、摂動推定を単一の安定性証明の下で統合することで、試行錯誤的なハイブリッドを超えた原理に基づく設計へと前進します。実務では、床掃除ロボット、支援用車いす、点検プラットフォームなどがサブデシメートル精度で狭い経路を追従しつつ、適度なエネルギー消費で段差やノイズ、荷重変化を許容できるようになる可能性があります。多数のパラメータの調整は単純なPIDより複雑ですが、コントローラは現代の組込みプロセッサ上で十分に軽量に動作します。著者らはFUHACを、視覚やマッピング、さらには深層強化学習と統合される将来のシステムの基盤と見なし、現実の環境を走るより信頼性の高い知的モバイルロボットへの道を開くことを期待しています。
引用: Xu, P., Maghsoudniazi, M. & Maghsoudniazi, Y. Integrating Lyapunov based backstepping and neuro fuzzy logic with sliding mode control for precise trajectory tracking of differential drive robots. Sci Rep 16, 11961 (2026). https://doi.org/10.1038/s41598-026-39667-1
キーワード: モバイルロボット制御, 軌道追従, 適応ハイブリッドコントローラ, 微分走行ロボット, 摂動除去