Clear Sky Science · ar
دمج ارتداد باحث ليابونوف والمنطق العصبي الضبابي مع التحكم بنمط الانزلاق لتتبع مسار دقيق لروبوتات القيادة التفاضلية
روبوتات تبقى على المسار
من جامعي الطلبات في المستودعات إلى المركبات الكوكبية، ينتقل العديد من الروبوتات على عجلتين مدفوعتين مثل الكرسي المتحرك الكهربائي. جعل هذه الآلات تتبع مساراً بدقة على مستوى السنتيمتر أصعب مما يبدو: الأرضيات غير مستوية، والعجلات تنزلق، والمحركات قد تصل إلى التشبع، وميكانيكا الروبوت نفسها معقدة. تقدم هذه الورقة دماغاً جديداً لهذه الروبوتات — مخطط تحكم يسميه المؤلفون المتحكم التكيفي الهجين الثابت فائق الأداء (FUHAC) — مصمّماً لإبقاء روبوت ذي عجلتين ملتصقاً بمساره المخطط، حتى عندما يكون العالم من حوله فوضوياً ومتحولاً.
لماذا توجيه عجلتين صعب للغاية
تتجه روبوتات القيادة التفاضلية بتحريك العجلة اليمنى واليسرى بسرعات مختلفة. هذا التصميم البسيط يخفي فيزياء صعبة. لا يستطيع الروبوت التحرك جانبياً، وقد يكون مركز كتلته بعيداً عن المنتصف، والاحتكاك، والمطبات، والأحمال المجهولة تدفعه باستمرار عن مساره. المتحكمات الكلاسيكية مثل PID أو حتى الأساليب الأحادية المتقدمة تعمل جيداً فقط في شروط ضيقة: قد تتبع المسار بسلاسة في الانحناءات الخفيفة لكنها تكافح مع المنعطفات الحادة، والدفع المفاجئ، أو النماذج غير الدقيقة. حاول الباحثون إضافة وحدات تعليمية، أو منطق ضبابي، أو طبقات تحكم قوية، ومع ذلك عادةً ما تُجمع هذه الأنظمة الهجينة بطريقة مرتجلة، دون ضمان راسخ بأن الكل سيظل مستقراً.
مزاوجة عدة عقول في بنية واحدة
يقترح المؤلفون FUHAC كهيكل موحّد يجمع عمداً أربع أفكار تحكم مختلفة، كل منها يتعامل مع جزء مختلف من المشكلة. يوفر جوهر الارتداد (backstepping) توجيهاً سلساً قائمًا على النموذج يجعل الروبوت نظرياً يقترب من المسار المرغوب. يجلس وحدة عصبية‑ضبابية فوق هذا الأساس وتتعلم إلغاء التأثيرات المجهولة — مثل الاحتكاك غير الممَثل أو الخصائص الميكانيكية الدقيقة — عن طريق مراقبة تطور خطأ التتبع. تضيف طبقة نمط الانزلاق غلافاً قوياً وحامياً يتفاعل بسرعة مع الاضطرابات الأكبر وتضمن أنه يمكن رفض الدفعات والهبّات الحديّة في زمن محدود. أخيراً، يراقب رصد الاضطرابات حركة الروبوت ويستنتج القوى الخارجية المؤثرة عليه، بحيث يمكن للمتحكم مكافحة هذه القوى بشكل استباقي بدلاً من مجرد التفاعل بعد وقوعها. بدلاً من مزج هذه العناصر بأوزان ثابتة، يستخدم FUHAC عامل مزج قائم على الأداء يحول التأثير بينها في الزمن الحقيقي، اعتماداً على مدى حجم وتذبذب خطأ التتبع.
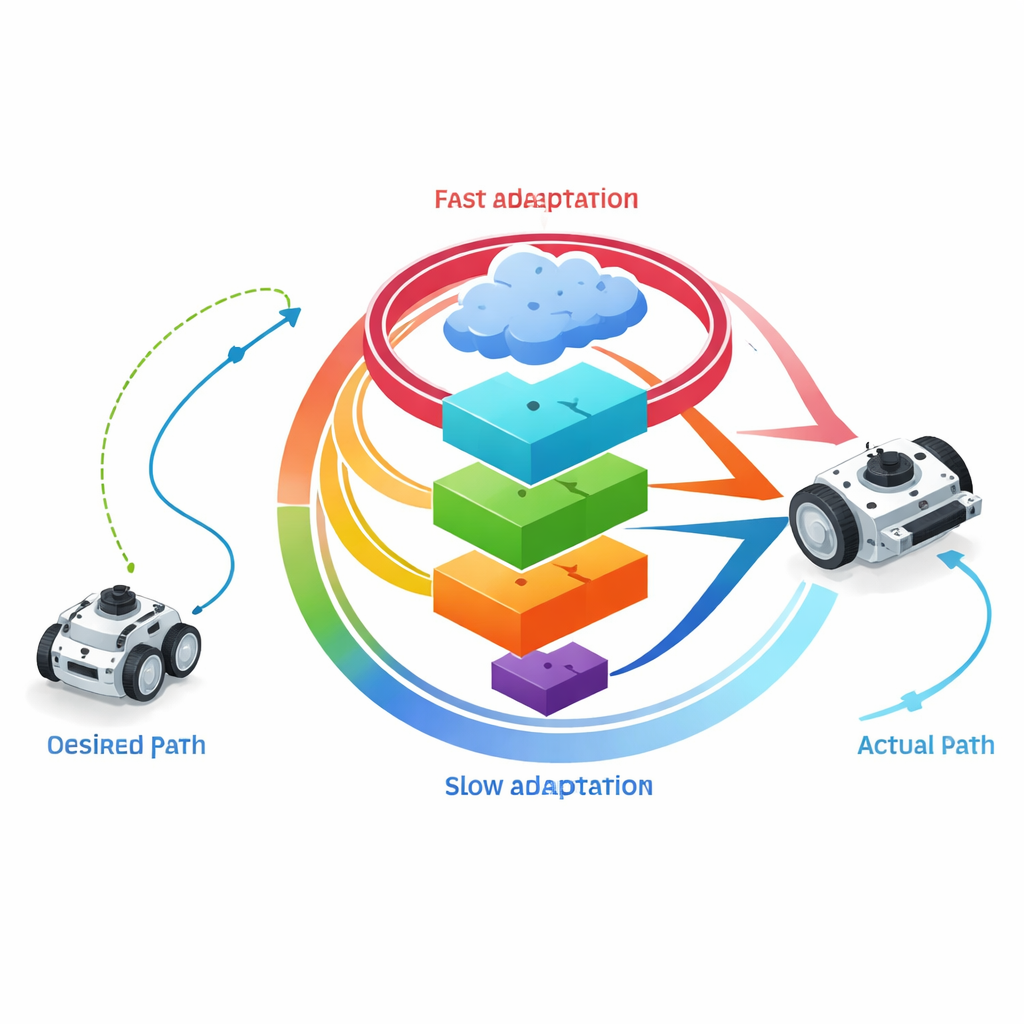
ردود سريعة، وتعلّم بطيء
ابتكار رئيسي في FUHAC هو الطريقة التي يفصل بها بين ردود الفعل السريعة والتعديلات الاستراتيجية الأبطأ. يعمل المتحكم على ساعتين للتكيّف: حلقة سريعة تُحدَّث كل 30 ملِّي ثانية لتعديل الكسبات لقمع الانحرافات المفاجئة والتذبذبات، وحلقة أبطأ تُحدَّث كل 150 ملِّي ثانية تضبط المعاملات تدريجياً لتحقيق دقة طويلة الأمد وكفاءة طاقة. تم اختيار هذا المخطط ذي المعدلين بحيث يشعر الروبوت أن المعاملات البطيئة شبه ثابتة أثناء تعامله مع الحركة السريعة، وهو مبدأ مستلهم من فصل مقاييس الزمن في نظرية التحكم. للحفاظ على الصياغة الرياضية، يُنشئ المؤلفون دالة طاقة وحيدة تشبه ليابونوف تجمع أخطاء التتبع، وأخطاء التعلم، وسلوك الانزلاق، وأخطاء رصد الاضطراب معًا. ثم يُظهرون أنه، تحت افتراضات معقولة، يمكن لهذه الطاقة أن تتناقص أو تتسطح فقط، مما يعني أن انحراف الروبوت عن المسار يبقى محدوداً وإذا تلاشت أخطاء التقريب والاضطرابات، فقد يختفي مع الزمن.
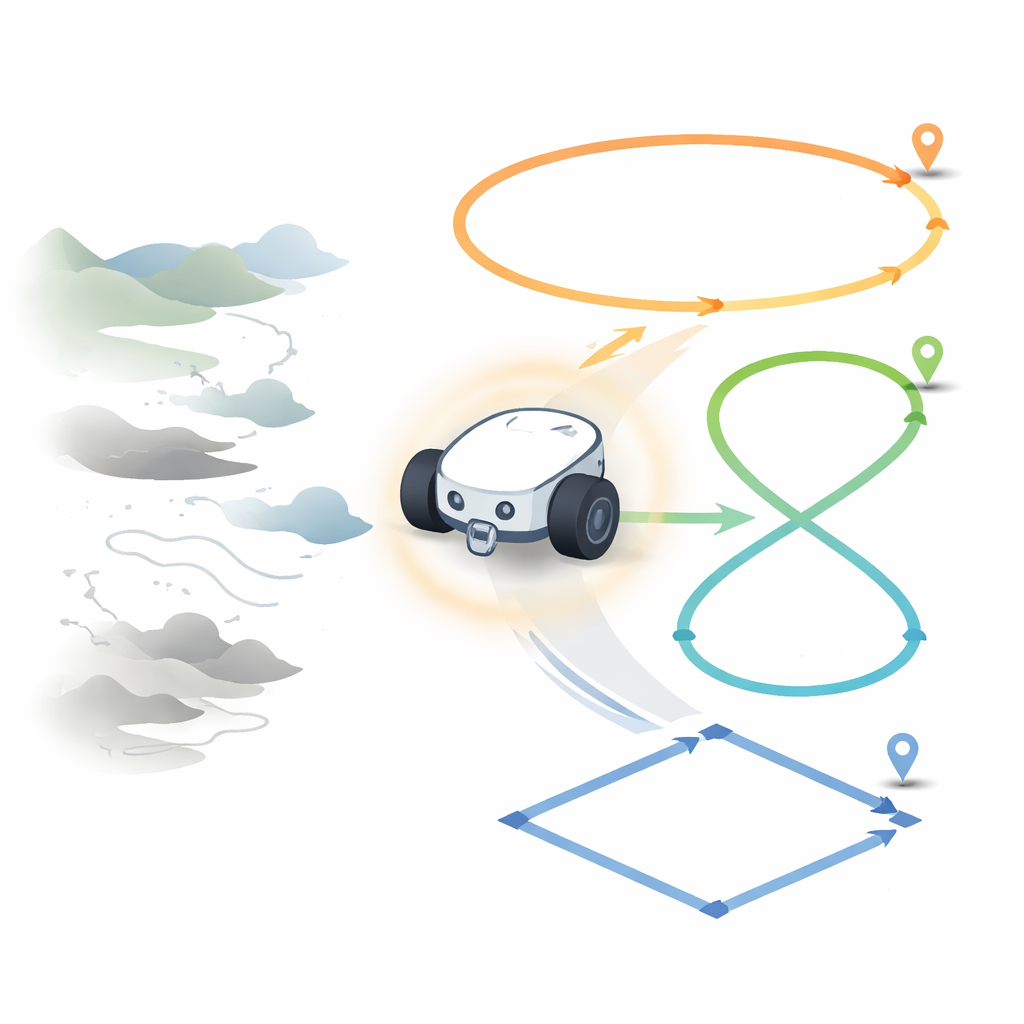
اختبار المتحكم
لمعرفة كيف يتصرف FUHAC، أجرت الفريق محاكاة على ثلاثة مسارات معيارية: شكل ثمانية، دائرة، ومعين ذو زوايا حادة. تضغط هذه المنحنيات على جوانب مختلفة من الحركة: الانحناء المستمر، وعكس الانحناء، وتغيرات الاتجاه المفاجئة. في جميع الحالات بقي خطأ الموضع النهائي أقل من 4 سنتيمترات، مع مؤشرات خطأ تراكمية صغيرة وعزم محرك متوسط متواضع أقل من 10 نيوتن‑متر. استقر المتحكم على تتبع شبه ثابت في حوالي 12.7 ثانية، مع إبقاء التذبذبات ضمن نطاق ضيق؛ ازداد الكسب الانزلاقي التكيفي بالكفاية للحفاظ على الصلابة دون إهدار للطاقة. عند المقارنة مع PID القياسي، والارتداد الخالص، ونهج نمط الانزلاق الخالص، طابق FUHAC دقتهم أو تفوق عليها مع تقليل كبير في "الاهتزاز" عالي التردد الذي يمكن أن يتلف المحركات. كما جرّب المؤلفون الطريقة على بيانات مسجلة من روبوت Pioneer حقيقي. هنا، أدت التأثيرات غير المُمَثلة مثل انزلاق العجلات وتشبع المحرك إلى أخطاء أكبر — بمرتبة أمتار بدلاً من سنتيمترات — لكن الحلقة المغلقة بقيت مستقرة وتعافت بعد مناورتها العنيفة، مما يبرز صلابة الإطار.
ما الذي يعنيه هذا للروبوتات اليومية
يُظهر FUHAC أن التحكم "متعدد‑الدماغ" المنسق بعناية يمكن أن يمنح الروبوتات ذات العجلات كلّاً من الدقة والمرونة. من خلال توحيد التوجيه السلس القائم على النموذج، والتعويض القائم على التعلم، والحماية القوية، وتقدير الاضطراب تحت برهان استقرار واحد، ينتقل الأسلوب من هجائن التجربة والخطأ إلى تصميم مؤسس. عملياً، قد يساعد هذا روبوتات الأرضية، والكراسي المتحركة المساعدة، ومنصات التفتيش على اتباع مسارات ضيقة بدقة دون‑عشرية الأمتار مع استهلاك طاقة معتدل وتحمل للصدمات والضوضاء والأحمال المتغيرة. على الرغم من أن ضبط معاييره العديدة أكثر تعقيداً من PID بسيط، يظل المتحكم خفيف الحساب بما يكفي لمعالجات مضمنة حديثة. يرى المؤلفون FUHAC كأساس لأنظمة مستقبلية تدمج مثل هذا التحكم مع الرؤية، والخرائط، وحتى التعلم المعزز العميق، ممهّداً الطريق لروبوتات متنقلة أكثر موثوقية وذكاءً تتنقل في بيئات العالم الحقيقي.
الاستشهاد: Xu, P., Maghsoudniazi, M. & Maghsoudniazi, Y. Integrating Lyapunov based backstepping and neuro fuzzy logic with sliding mode control for precise trajectory tracking of differential drive robots. Sci Rep 16, 11961 (2026). https://doi.org/10.1038/s41598-026-39667-1
الكلمات المفتاحية: تحكم الروبوت المحمول, تتبع المسار, متحكم هجيني تكيفي, روبوتات القيادة التفاضلية, رفض الاضطراب