Clear Sky Science · nl
Integratie van Lyapunov-gebaseerde backstepping en neuro-fuzzy logica met sliding mode control voor nauwkeurige trajecttracking van differentiële aandrijvingsrobots
Robots die op koers blijven
Van magazijnpickers tot planetaire rovers, veel robots bewegen op twee aangedreven wielen zoals een elektrische rolstoel. Deze machines met centimeterprecisie een pad laten volgen is lastiger dan het lijkt: vloeren zijn ongelijk, wielen slippen, motoren verzadigen en de mechanica van de robot zelf is ingewikkeld. Dit artikel introduceert een nieuwe regelaar voor zulke robots — een regelschema genaamd Fixed Ultra‑Hybrid Adaptive Controller (FUHAC) — ontworpen om een tweewielige robot aan zijn geplande route te klampen, zelfs wanneer de omgeving rommelig en veranderlijk is.
Waarom het sturen van twee wielen zo moeilijk is
Differentiële‑drive mobiele robots sturen door het linker- en rechterwiel met verschillende snelheden te laten draaien. Deze eenvoudige opzet verbergt lastige natuurkunde. De robot kan niet zijwaarts bewegen, zijn massamiddelpunt kan niet gecentreerd zijn, en wrijving, stoten en onbekende belastingen duwen hem voortdurend van koers. Klassieke regelingen zoals PID of zelfs meer geavanceerde enkelvoudige methoden werken goed alleen onder beperkte omstandigheden: ze volgen misschien vloeiend op zachte bochten maar worstelen met scherpe bochten, plotselinge duwen of imperfecte modellen. Onderzoekers hebben geprobeerd leermodules, fuzzy logic of robuuste control-lagen toe te voegen, maar zulke hybriden worden vaak ad hoc aan elkaar geplakt, zonder solide garantie dat het geheel stabiel blijft.
Verschillende “hersenen” samenvoegen
De auteurs stellen FUHAC voor als een eenduidige architectuur die opzettelijk vier verschillende controleideeën combineert, elk gericht op een ander deel van het probleem. Een backstepping-kern levert vloeiende, modelgebaseerde sturing die theoretisch de robot richting het gewenste pad brengt. Een neuro‑fuzzy module bouwt voort op deze basis en leert onbekende effecten te compenseren — zoals ongemodelleerde wrijving of kleine mechanische eigenaardigheden — door te observeren hoe de trackfout zich ontwikkelt. Een sliding‑mode laag voegt een sterke beschermende schelp toe die snel reageert op grotere verstoringen en garandeert dat begrensde duwen en rukwinden in eindige tijd kunnen worden afgewezen. Ten slotte observeert een storingswaarnemer de beweging van de robot en leidt de externe krachten af die erop inwerken, zodat de regelaar ze proactief kan tegenwerken in plaats van alleen achteraf te reageren. In plaats van deze elementen met vaste gewichten te mengen, gebruikt FUHAC een prestatiegebaseerde mixfactor die de invloed tussen hen in real time verschuift, afhankelijk van hoe groot en hoe oscillerend de trackfout is.
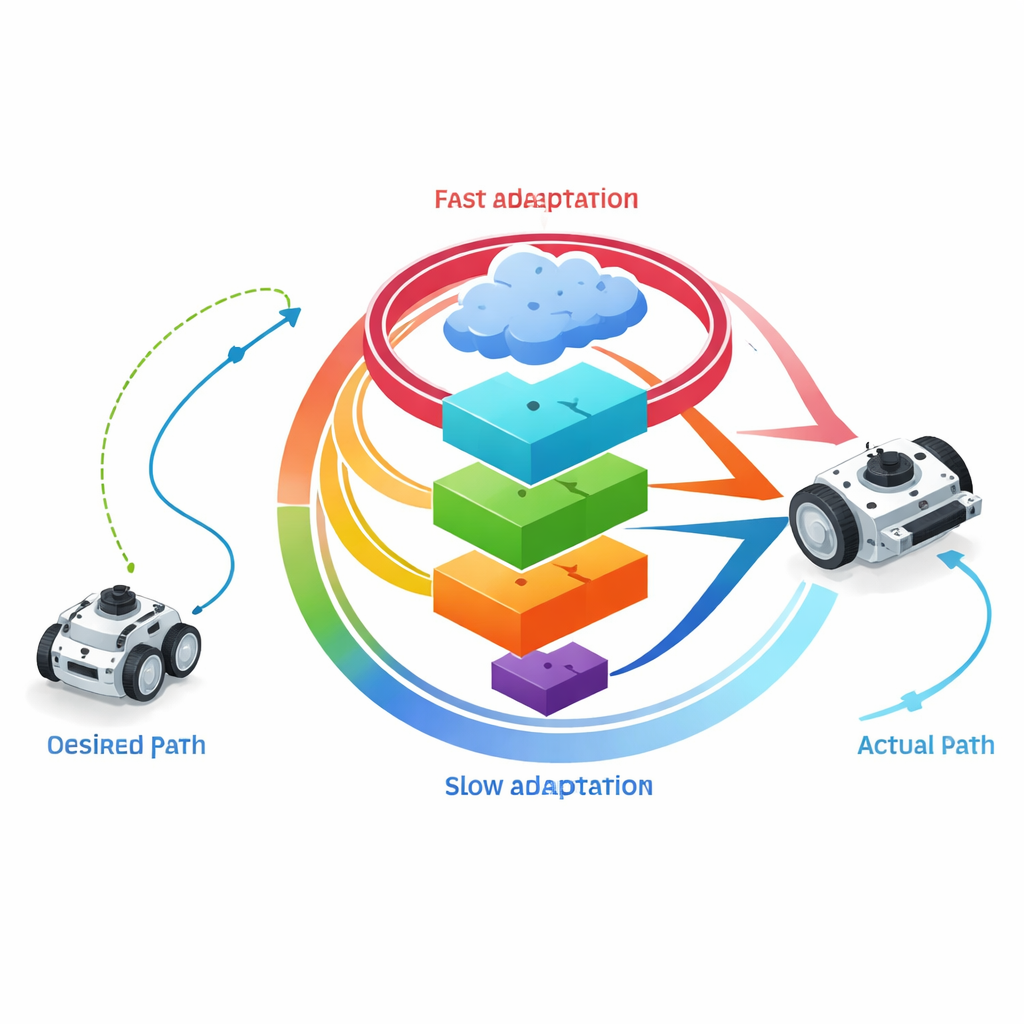
Snelle reacties, trager leren
Een belangrijke innovatie in FUHAC is de manier waarop snelle reflexen worden gescheiden van langzamere, strategische aanpassingen. De regelaar draait twee adaptatietijden: een snelle lus, elke 30 milliseconden geüpdatet, die versterkingen bijstelt om plotselinge afwijkingen en oscillaties te dempen, en een langzamere lus, elke 150 milliseconden geüpdatet, die parameters geleidelijk bijstuurt voor langetermijnnauwkeurigheid en energie-efficiëntie. Dit dual‑rate schema is gekozen zodat de robot de langzame parameters vrijwel als vast ervaart terwijl hij omgaat met snelle bewegingen, een principe geïnspireerd door tijdsschaalscheiding in de regeltheorie. Om alles wiskundig te beheersen, construeren de auteurs een enkele energie‑achtige functie (een Lyapunov‑functie) die trackingfouten, leermislukkingen, sliding‑gedrag en storingswaarnemerfouten gelijktijdig vastlegt. Ze tonen vervolgens aan dat, onder redelijke aannames, deze energie alleen kan afnemen of stabiliseren, wat betekent dat de afwijking van het pad begrensd blijft en, als approximatiefouten en verstoringen afnemen, zelfs in de loop van de tijd verdwijnt.
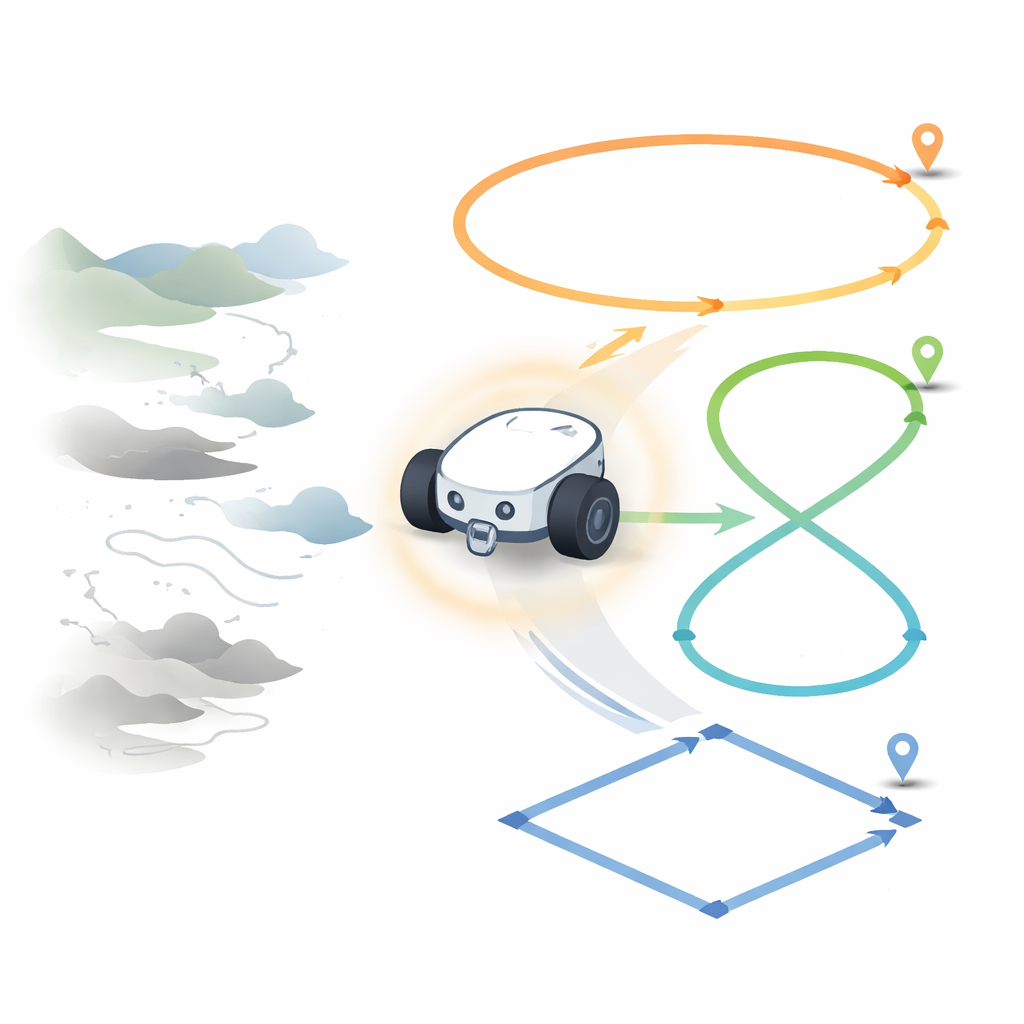
De regelaar op de proef stellen
Om te zien hoe FUHAC zich gedraagt, voerde het team simulaties uit op drie benchmarkpaden: een figuur‑acht, een cirkel en een scherpgehoekte diamant. Deze krommen belasten verschillende aspecten van beweging: continue kromming, omkeer van kromming en abrupte richtingsveranderingen. In alle gevallen bleef de eindpositieafwijking onder de 4 centimeter, met kleine cumulatieve foutindices en een bescheiden gemiddelde motorkoppel onder 10 newtonmeter. De regelaar vestigde bijna‑stabiele tracking in ongeveer 12,7 seconden, terwijl oscillaties binnen een smalle band werden gehouden; zijn adaptieve sliding‑gain nam net genoeg toe om robuustheid te behouden zonder energie te verspillen. Vergeleken met standaard PID, zuiver backstepping en zuivere sliding‑mode benaderingen, evenaarde of overtrof FUHAC hun nauwkeurigheid terwijl het de hoge‑frequentie ‘‘chatter’’ die actuatoren kan verslijten drastisch verminderde. De auteurs testten de methode ook op opgenomen data van een echte Pioneer‑robot. Hier zorgden ongemodelleerde effecten zoals wielslip en motorverzadiging voor grotere fouten — in meters in plaats van centimeters — maar de gesloten lus bleef stabiel en herstelde zich na agressieve manoeuvres, wat de robuustheid van het raamwerk onderstreepte.
Wat dit betekent voor alledaagse robots
FUHAC laat zien dat zorgvuldig georkestreerde "veel‑hersenen" besturing wheeled robots zowel precisie als veerkracht kan bieden. Door vloeiende modelgebaseerde sturing, leergebaseerde compensatie, robuuste bescherming en storingsschatting te verenigen onder één stabieliteitsbewijs, gaat de methode verder dan trial‑and‑error hybriden naar een principiële ontwerpaanpak. In de praktijk kan dit helpen dat vloerrobotten, hulpmotorische rolstoelen en inspectieplatforms strakke paden volgen met subdecimeter‑nauwkeurigheid terwijl ze matig energie verbruiken en stoten, ruis en veranderende belastingen tolereren. Hoewel het afstemmen van de vele parameters complexer is dan bij een eenvoudige PID, blijft de controller rekenkundig licht genoeg voor moderne embedded processors. De auteurs zien FUHAC als een basis voor toekomstige systemen die dergelijke besturing combineren met visie, mapping en zelfs deep reinforcement learning, en daarmee de weg vrijmaken voor betrouwbaardere, intelligentere mobiele robots die in echte omgevingen navigeren.
Bronvermelding: Xu, P., Maghsoudniazi, M. & Maghsoudniazi, Y. Integrating Lyapunov based backstepping and neuro fuzzy logic with sliding mode control for precise trajectory tracking of differential drive robots. Sci Rep 16, 11961 (2026). https://doi.org/10.1038/s41598-026-39667-1
Trefwoorden: besturing mobiele robot, trajecttracking, adaptieve hybride controller, differentiële aandrijvingsrobots, onderdrukking van storingen