Clear Sky Science · pl
Integracja sterowania backstepping opartego na funkcji Lyapunowa i logiki neuro‑rozmytej ze sterowaniem typu sliding mode dla precyzyjnego śledzenia trajektorii robotów z napędem różnicowym
Roboty, które trzymają kurs
Od robotów zbierających towar w magazynach po łaziki planetarne — wiele maszyn porusza się na dwóch napędzanych kołach, jak elektryczny wózek inwalidzki. Sprawienie, by takie urządzenia podążały ścieżką z dokładnością rzędu centymetrów, jest trudniejsze niż się wydaje: podłogi są nierówne, koła poślizgują się, silniki osiągają nasycenie, a mechanika robota jest złożona. W artykule przedstawiono nowy „mózg” dla takich robotów — schemat sterowania nazwany Fixed Ultra‑Hybrid Adaptive Controller (FUHAC) — zaprojektowany, by utrzymywać robot dwukołowy przy zaplanowanej trasie, nawet gdy otoczenie jest chaotyczne i zmienne.
Dlaczego prowadzenie dwóch kół jest trudne
Roboty mobilne z napędem różnicowym skręcają, regulując prędkości kół lewego i prawego. Ta prosta konstrukcja kryje trudne zagadnienia fizyczne. Robot nie może poruszać się bokiem, jego środek masy może być przesunięty, a tarcie, wyboje i nieznane obciążenia stale odchylają go od kursu. Klasyczne regulatory, takie jak PID, a nawet bardziej zaawansowane metody jednorodne działają dobrze jedynie w wąskich warunkach: mogą płynnie śledzić łagodne zakręty, ale mają problemy przy ostrych skrętach, nagłych pchnięciach czy niedokładnych modelach. Badacze próbowali dodawać moduły uczące, logikę rozmytą czy warstwy sterowania odpornego, jednak takie hybrydy zwykle składane są doraźnie, bez solidnej gwarancji stabilności całego układu.
Łączenie kilku „mózgów” w jeden
Autorzy proponują FUHAC jako zintegrowaną architekturę, która celowo łączy cztery różne idee sterowania, z których każda zajmuje się innym aspektem problemu. Rdzeń backstepping zapewnia płynne, oparte na modelu kierowanie, które w teorii zbliża robota do żądanej ścieżki. Moduł neuro‑rozmyty leży nad tą bazą i uczy się niwelować nieznane efekty — takie jak niemodelowane tarcie czy drobne niedoskonałości mechaniczne — obserwując ewolucję błędu śledzenia. Warstwa sliding‑mode dodaje wytrzymałą, ochronną powłokę, która szybko reaguje na większe zakłócenia i gwarantuje, że ograniczone pchnięcia i podmuchy można odrzucić w skończonym czasie. Wreszcie obserwator zakłóceń monitoruje ruch robota i wnioskuje o działających na niego siłach zewnętrznych, dzięki czemu regulator może im przeciwdziałać proaktywnie, zamiast tylko reagować po fakcie. Zamiast mieszać te elementy stałymi wagami, FUHAC stosuje współczynnik mieszania oparty na wydajności, który w czasie rzeczywistym przesuwa wpływ poszczególnych składników w zależności od wielkości i oscylacyjności błędu śledzenia.
Szybkie reakcje, wolne uczenie
Istotną innowacją w FUHAC jest rozdział szybkich refleksów od wolniejszych, strategicznych korekt. Sterownik pracuje na dwóch zegarach adaptacyjnych: szybkim pętla, aktualizowanym co 30 milisekund, który dostraja wzmocnienia, by tłumić nagłe odchylenia i oscylacje, oraz wolniejszym pętla, aktualizowanym co 150 milisekund, która stopniowo reguluje parametry dla długoterminowej dokładności i efektywności energetycznej. Ten schemat o dwóch skalach czasowych jest dobrany tak, by robot postrzegał powolne parametry jako niemal stałe podczas szybkich manewrów — zasada inspirowana separacją skali czasowej w teorii sterowania. Aby zachować formalną kontrolę matematyczną, autorzy konstruują pojedynczą funkcję przypominającą energię (funkcję Lyapunowa), która jednocześnie obejmuje błędy śledzenia, błędy uczenia, zachowanie sliding oraz błędy obserwatora zakłóceń. Następnie pokazują, że przy rozsądnych założeniach ta energia może tylko maleć lub się wypłaszczać, co oznacza, że odchylenie robota od ścieżki pozostaje ograniczone i — jeśli błędy aproksymacji i zakłócenia zanikną — z czasem nawet znika.
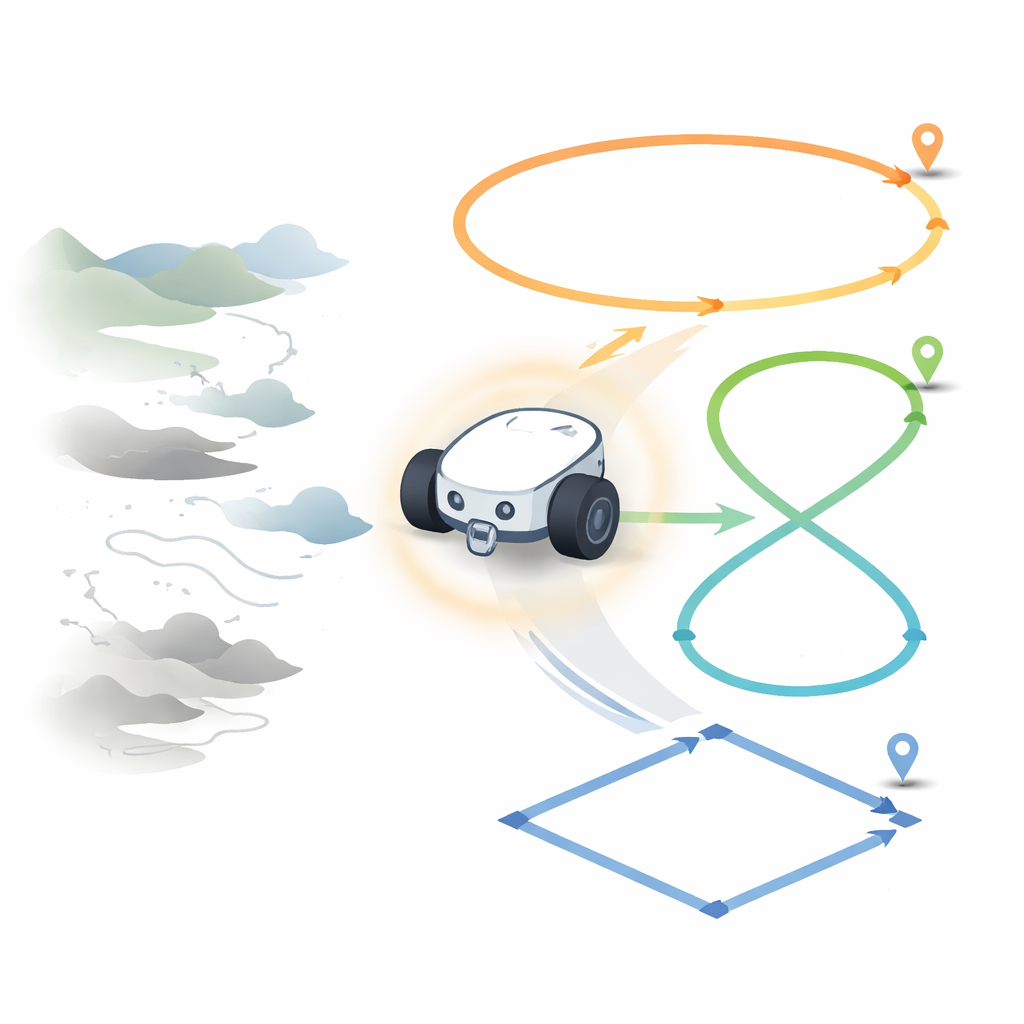
Próby kontrolera
Aby zobaczyć, jak FUHAC działa w praktyce, zespół przeprowadził symulacje na trzech wzorcowych ścieżkach: ósemce, okręgu i diamentowym torze z ostrymi narożnikami. Krzywe te eksponują różne aspekty ruchu: ciągłą krzywiznę, zmianę zwrotu krzywizny i gwałtowne zmiany kierunku. We wszystkich przypadkach błąd końcowej pozycji utrzymał się poniżej 4 centymetrów, z małymi skumulowanymi wskaźnikami błędu i umiarkowanym średnim momentem napędowym poniżej 10 niutonometrów. Sterownik ustabilizował się do niemal stałego śledzenia w około 12,7 sekundy, utrzymując oscylacje w wąskim paśmie; jego adaptacyjne wzmocnienie sliding zwiększyło się tylko na tyle, by zachować odporność bez marnowania energii. W porównaniu ze standardowym PID, czystym backsteppingiem i czystym sliding‑mode, FUHAC dorównał lub przewyższył je pod względem dokładności, jednocześnie znacząco redukując wysokoczęstotliwościowe „drgania” mogące zużywać aktuatory. Autorzy przetestowali też metodę na zarejestrowanych danych z rzeczywistego robota Pioneer. Tam niemodelowane efekty, takie jak poślizg kół i nasycenie silników, powodowały większe błędy — rzędu metrów, a nie centymetrów — lecz układ zamknięty pozostał stabilny i odzyskał kontrolę po agresywnych manewrach, podkreślając odporność ramy.
Co to oznacza dla codziennych robotów
FUHAC pokazuje, że starannie zorganizowane sterowanie „wielomózgowe” może dostarczyć robotom kołowym zarówno precyzji, jak i odporności. Poprzez ujednolicenie płynnego, opartego na modelu kierowania, kompensacji opartej na uczeniu, ochrony odpornej oraz estymacji zakłóceń pod jedną dowodzoną matrycą stabilności, metoda wykracza poza hybrydy tworzone metodą prób i błędów w kierunku zasadniczego projektowania. W praktyce może to pomóc robotom podłogowym, wspomagającym wózkom inwalidzkim i platformom inspekcyjnym w podążaniu ścisłymi trasami z dokładnością poniżej dekametra, przy umiarkowanym zużyciu energii oraz tolerancji na wyboje, szumy i zmienne obciążenia. Chociaż strojenie wielu jej parametrów jest bardziej skomplikowane niż w prostym PID, sterownik pozostaje na tyle lekki obliczeniowo, by działać na współczesnych wbudowanych procesorach. Autorzy widzą FUHAC jako fundament dla przyszłych systemów łączących takie sterowanie z percepcją wizyjną, mapowaniem, a nawet głębokim uczeniem ze wzmocnieniem, torując drogę bardziej niezawodnym i inteligentnym robotom mobilnym poruszającym się w środowiskach rzeczywistych.
Cytowanie: Xu, P., Maghsoudniazi, M. & Maghsoudniazi, Y. Integrating Lyapunov based backstepping and neuro fuzzy logic with sliding mode control for precise trajectory tracking of differential drive robots. Sci Rep 16, 11961 (2026). https://doi.org/10.1038/s41598-026-39667-1
Słowa kluczowe: sterowanie robotów mobilnych, śledzenie trajektorii, adaptacyjny sterownik hybrydowy, roboty z napędem różnicowym, odrzucanie zakłóceń