Clear Sky Science · sv
Effektiv hastighets- och spänningsreglering av BLDC-motordrift för EV‑applikationer med en flerenhets-interleaved DC–DC‑bidirektionell omvandlare med TIFDNFD–SFOA‑styrenhet
Varför jämnare elektriska drivlinor spelar roll
När elfordon blir vanligare förväntar sig förare att de inte bara ska vara miljövänliga utan också mjuka, snabba i respons och pålitliga. Bakom den där lätta känslan ligger en komplex kedja av elektronik som måste balansera batterikraft, motorhastighet och spänningsstabilitet samtidigt. Denna artikel undersöker ett nytt sätt att forma energiflödet så att en populär typ av elmotor kan drivas mer effektivt, med snabbare respons och färre oönskade vågningar i vridmoment och hastighet.
Från batteri till hjul
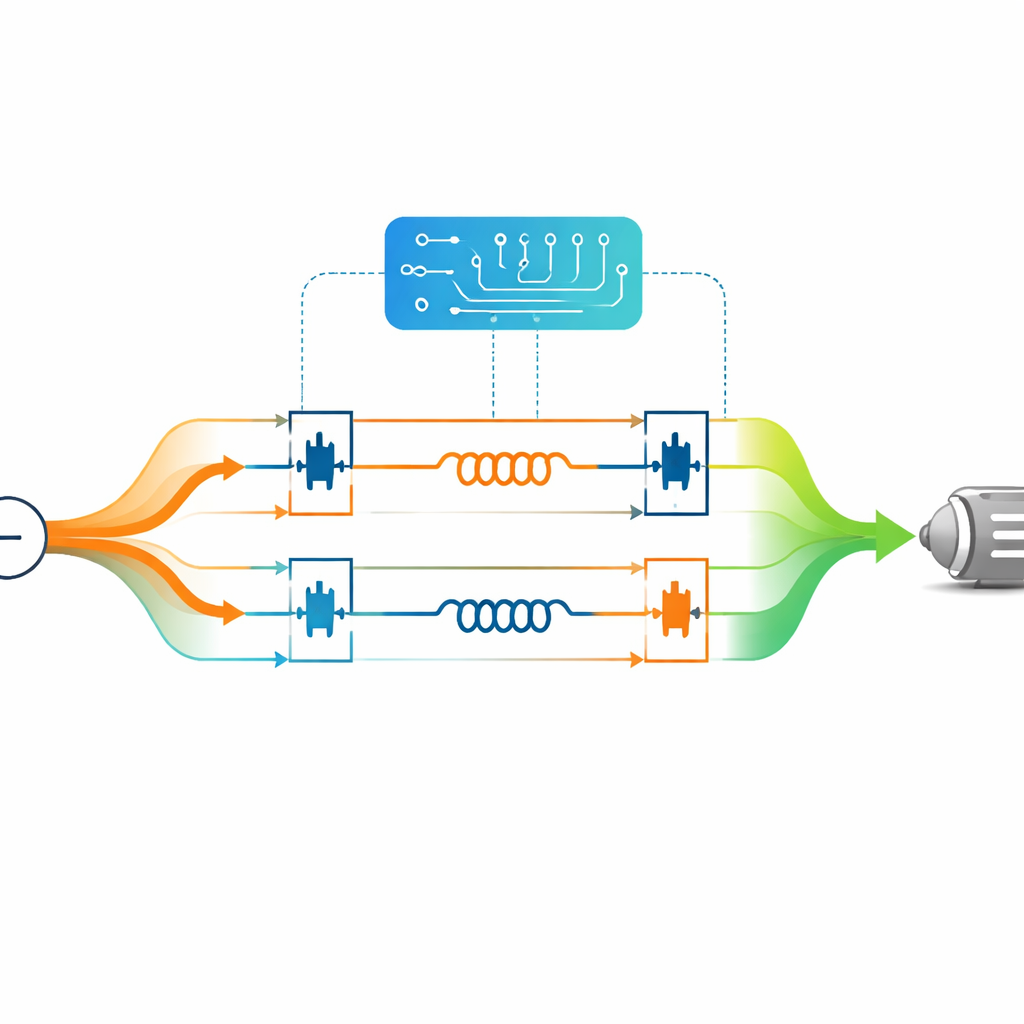
I en typisk elbil levererar batteriet likström (DC), vilken måste anpassas och sedan omvandlas till växelström (AC) för att driva en borstlös likströmsmotor (BLDC). Om spänningen som matar motorinvertern svajar eller svarar långsamt på förändringar i belastning kan fordonets gång kännas mindre jämn och energi gå förlorad. Studien fokuserar på ett särskilt DC–DC‑steg som kallas en flerenhets‑interleaved bidirektionell omvandlare. Istället för en enda kraftväg delar denna omvandlare upp strömmen i flera parallella grenar som växlar i ett noggrant förskjutet mönster och sedan kombineras igen. Denna ordning minskar elektrisk vågning, förbättrar fördelningen av ström mellan komponenter och håller DC‑länks‑spänningen stabil även när lasten förändras.
En smartare metod för att hålla hastighet och spänning i fas
Att bibehålla konstant motorhastighet samtidigt som DC‑länks‑spänningen hålls inom ett snävt intervall är en kontrollutmaning, särskilt när fordonet möter backar, accelerationer eller andra plötsliga förändringar. Klassiska regulatorer, eller många moderna maskininlärningsbaserade scheman, kan drabbas av översläng, långsam reglering eller tung beräkningsbörda. För att hantera detta utformar författaren en ny regulator kallad TIFDNFD, som bygger vidare på välkända styridéer med extra justermöjligheter för fininställning av systemets reaktion på fel. Istället för att förlita sig på trial-and-error‑inställning använder artikeln en optimeringsmetod inspirerad av beteendet hos superb fairy‑wren‑fåglar för att automatiskt välja regulatorns många parametrar.
Naturinspirerad finjustering under huven
Optimeringsrutinen, modellerad på hur dessa fåglar växer, söker föda och undviker rovdjur, utforskar möjliga regulatorinställningar och bevarar de som ger bäst drivbeteende. Dess vägledande mått är hur snabbt och mjukt systemets fel avtar över tid. I simulering konvergerar algoritmen snabbt till en uppsättning inställningar som kraftigt reducerar den tid det tar för motorhastigheten att stabilisera sig efter en förändring, samtidigt som spänningssvaj och vridmomentsvängningar minskas. Jämfört med flera avancerade alternativ, inklusive sliding‑mode och neuronnätsbaserade regulatorer, når den nya kombinationen målhastigheten snabbare, med mycket mindre översläng och lägre integrerat fel.
Vad simuleringarna visar
Med detaljerade modeller i MATLAB/Simulink testar studien hela kedjan: batteri, interleaved‑omvandlare, inverter och BLDC‑motor. Omvandlaren höjer batteriets 250 V till ungefär 480 V och håller den nästan konstant när systemet har startat, vilket ger invertern en ren matning. Invertern genererar sedan välbalanserade trefasiga spänningar och strömmar. BLDC‑motorn snabbar upp till cirka 3000 rpm med endast en liten tillfällig överskjutning över målet, och går därefter stabilt med jämnt vridmoment. Nyckelmått som peak‑tid, insättnings‑/stabiliseringstid och en standardiserad mätning av ackumulerat fel förbättras alla märkbart jämfört med konkurrerande styrscheman.
Vad detta innebär för framtida elfordon
För en allmän läsare är slutsatsen att detta arbete erbjuder en mer raffinerad elektronisk ”dirigent” för orkestern av komponenter mellan ett EV‑batteri och dess hjul. Genom att kombinera en vågningsdämpande kraftomvandlare med en automatiskt fininställd, högflexibel regulator kan systemet reagera snabbt på förarens önskemål samtidigt som spänning och hastighet hålls tätt reglerade. I praktiken kan detta översättas till drivlinor som känns mjukare, slösar mindre energi och utsätter hårdvaran för mindre påfrestning. Även om resultaten kommer från simuleringar snarare än vägtester, tyder de på en lovande väg mot effektivare och mer responsiva framdrivningssystem i såväl fordon som industriella elektriska drivningar.
Citering: Alwabli, A. Efficient speed and voltage regulation of BLDC motor drive for EV applications using a multi-device interleaved DC–DC bidirectional converter with TIFDNFD–SFOA controller. Sci Rep 16, 14584 (2026). https://doi.org/10.1038/s41598-026-44960-0
Nyckelord: elektriska fordon, BLDC‑motordrifter, DC–DC‑omvandlare, avancerad motorstyrning, effektkraftelektronik