Clear Sky Science · ar
تحكم فعال في السرعة والجهد لمحرك BLDC لتطبيقات المركبات الكهربائية باستخدام محول ثنائي الاتجاه متداخل متعدد الأجهزة مع متحكم TIFDNFD–SFOA
لماذا تهم المحركات الكهربائية الأكثر سلاسة
مع انتشار المركبات الكهربائية، يتوقع السائقون أن تكون ليست فقط نظيفة بل أيضاً سلسة الاستجابة وموثوقة. وراء هذا الإحساس السلس يوجد سلسلة معقدة من الإلكترونيات التي يجب أن توازن بين طاقة البطارية وسرعة المحرك وثبات الجهد في آن واحد. تستكشف هذه الورقة نهجاً جديداً لتشكيل تدفق الطاقة بحيث يعمل نوع شائع من المحركات الكهربائية بكفاءة أعلى، مع استجابة أسرع وتخفيض التموجات غير المرغوبة في العزم والسرعة.
من البطارية إلى العجلات
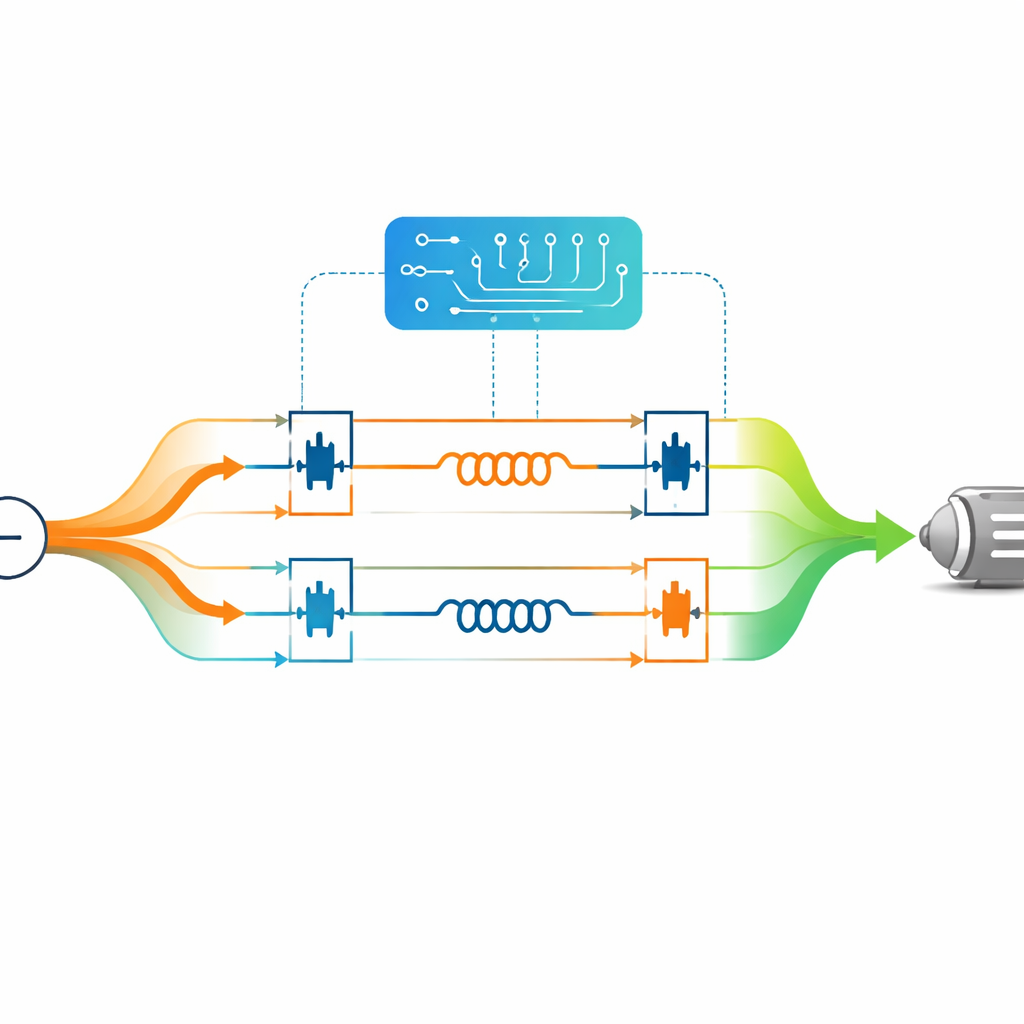
في سيارة كهربائية نموذجية، تزود البطارية طاقة تيار مباشر (DC) يجب تعديلها ثم تحويلها إلى تيار متناوب (AC) لتشغيل محرك BLDC بدون فراشي. إذا تذبذب الجهد المزوّد لمقلِب المحرك أو كان استجابته بطيئة لتغيرات الطلب، فقد يشعر السائق أن السيارة أقل سلاسة وتُهدر طاقة. تركز الدراسة على مرحلة DC–DC معينة تُسمى محول ثنائي الاتجاه متداخل متعدد الأجهزة. بدلاً من مسار طاقة واحد، يقسم هذا المحول التيار إلى عدة فروع متوازية تتبدل بنمط متزاح بشكل دقيق ثم تُعاد دمجها. هذا الترتيب يقلل التموجات الكهربائية، ويحسن تقاسم التيار بين المكونات، ويحافظ على ثبات جهد الوصلة DC حتى مع تغير الحمل.
طريقة أذكى للحفاظ على السرعة والجهد متوافقين
الحفاظ على سرعة محرك ثابتة مع إبقاء جهد الوصلة DC ضمن نطاق ضيق يُعد تحدياً تحكمياً، خصوصاً عندما تواجه السيارة تلالاً أو تسارعات أو تغييرات مفاجئة أخرى. قد تعاني المتحكمات التقليدية، أو حتى العديد من الأساليب الحديثة المعتمدة على تعلم الآلة، من تجاوز (overshoot)، أو زمن استقرار بطيء، أو عبء حسابي كبير. لمواجهة ذلك، صمم المؤلف متحكماً جديداً يُدعى TIFDNFD، يوسّع أفكار التحكم المعروفة مع أدوات إضافية لضبط كيفية استجابة النظام للأخطاء بدقة. بدلاً من الاعتماد على الضبط بالتجربة والخطأ، تستخدم الورقة طريقة تحسين مستوحاة من سلوك طيور السِرْدَة الخيالية (superb fairy-wren) لاختيار معلمات المتحكم العديدة تلقائياً.
ضبط مستوحى من الطبيعة خلف الكواليس
روتين التحسين، المصمم على نموذج كيفية نمو هذه الطيور والبحث عن الغذاء وتجنب المفترسات، يستكشف إعدادات المتحكم الممكنة ويحتفظ بتلك التي تجعل النظام يعمل بأفضل شكل. المقياس الإرشادي هو مدى سرعة وسلاسة تلاشي خطأ النظام بمرور الوقت. في المحاكاة، يتقارب الخوارزم بسرعة إلى مجموعة إعدادات تقلل بشكل كبير الزمن اللازم لاستقرار سرعة المحرك بعد تغيير، مع تقليل تموج الجهد وعزم الدوران. مقارنة بعدد من البدائل المتقدمة، بما في ذلك متحكمات الحالة الانزلاقية والمتحكمات القائمة على الشبكات العصبية، يصل المزيج الجديد إلى السرعة المستهدفة أسرع، مع تجاوز أصغر بكثير وخطأ متكامل أقل.
ما تكشفه المحاكاة
باستخدام نماذج مفصّلة في MATLAB/Simulink، تختبر الدراسة السلسلة الكاملة: البطارية، المحول المتداخل، المقلّب ومحرك BLDC. يرفع المحول جهد البطارية البالغ 250 فولت إلى نحو 480 فولت ويحافظ عليه شبه مستوٍ بمجرد بدء النظام، مما يوفر تغذية نظيفة للمقلّب. ثم ينتج المقلّب جهوداً وتيارات ثلاثية الأطوار متوازنة جيداً. يتسارع محرك BLDC بسرعة إلى نحو 3000 دورة في الدقيقة مع ارتفاع مؤقت طفيف فوق الهدف، ثم يعمل بثبات وبعزم سلس. تتحسن المقاييس الرئيسة مثل زمن الذروة وزمن الاستقرار ومقياس قياسي للخطأ التراكمي بشكل ملحوظ مقارنةً بمخططات التحكم المنافسة.
ماذا يعني هذا لمستقبل المركبات الكهربائية
للقارئ العام، الخلاصة أن هذا العمل يقدم "قائدًا" إلكترونياً أكثر دقة لأوركسترا المكونات بين بطارية المركبة الكهربائية وعجلاتها. من خلال دمج محول طاقة يقلل التموج مع متحكم مرن يتم ضبطه تلقائياً، يمكن للنظام الاستجابة بسرعة لمطالب السائق مع الحفاظ على الجهد والسرعة ضمن نطاقات ضيقة. عملياً، قد يترجم ذلك إلى محركات كهربائية في المركبات أشد سلاسة، تستهلك طاقة أقل وتقلل الإجهاد على الأجهزة. رغم أن النتائج جاءت من محاكاة وليست من اختبارات طريقية، فإنها تشير إلى مسار واعد نحو أنظمة دفع أكثر كفاءة واستجابة في المركبات والتطبيقات الصناعية للمحركات الكهربائية.
الاستشهاد: Alwabli, A. Efficient speed and voltage regulation of BLDC motor drive for EV applications using a multi-device interleaved DC–DC bidirectional converter with TIFDNFD–SFOA controller. Sci Rep 16, 14584 (2026). https://doi.org/10.1038/s41598-026-44960-0
الكلمات المفتاحية: المركبات الكهربائية, محركات BLDC, محولات DC–DC, التحكم المتقدّم في المحركات, إلكترونيات الطاقة