Clear Sky Science · pt
Regulação eficiente de velocidade e tensão de acionamento de motor BLDC para aplicações em VE usando um conversor DC–DC bidirecional intercalado multi-dispositivo com controlador TIFDNFD–SFOA
Por que acionamentos elétricos mais suaves importam
À medida que veículos elétricos se tornam mais comuns, os condutores esperam que sejam não apenas limpos, mas também suaves, responsivos e confiáveis. Por trás dessa sensação sem esforço está uma cadeia complexa de eletrônica que deve equilibrar a energia da bateria, a velocidade do motor e a estabilidade da tensão ao mesmo tempo. Este artigo explora uma nova forma de moldar esse fluxo de energia para que um tipo popular de motor elétrico funcione com mais eficiência, com resposta mais rápida e menos ondulação indesejada no torque e na velocidade.
Da bateria às rodas
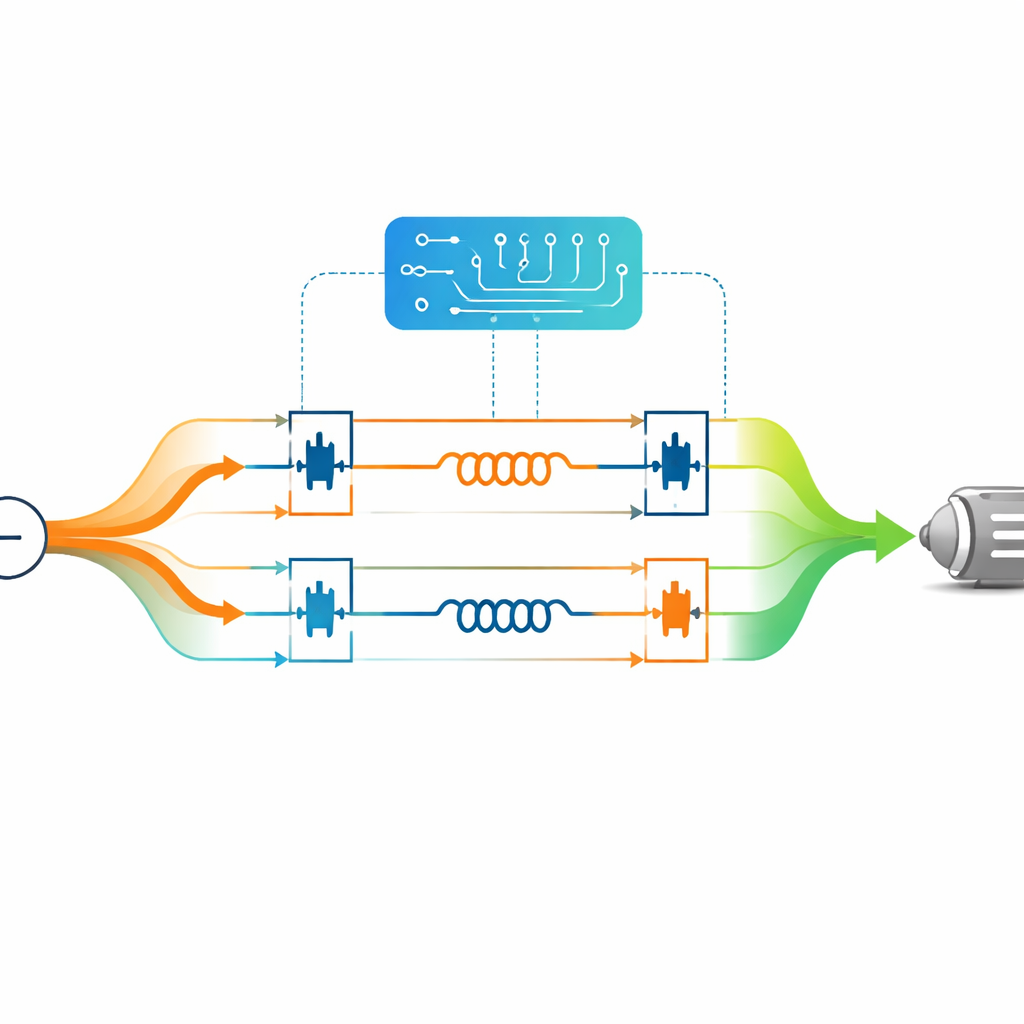
Em um carro elétrico típico, a bateria fornece corrente contínua (DC), que precisa ser ajustada e então convertida em corrente alternada (AC) para acionar um motor brushless DC (BLDC). Se a tensão que alimenta o inversor do motor oscilar ou responder lentamente às mudanças de demanda, o veículo pode parecer menos suave e desperdiçar energia. O estudo foca em um estágio DC–DC particular chamado conversor bidirecional intercalado multi-dispositivo. Em vez de um único caminho de potência, esse conversor divide a corrente em vários ramos paralelos que comutam em um padrão cuidadosamente defasado e depois se recombinam. Essa disposição reduz a ondulação elétrica, melhora o compartilhamento de corrente entre os componentes e mantém a tensão do link DC estável mesmo quando a carga varia.
Uma maneira mais inteligente de alinhar velocidade e tensão
Manter uma velocidade constante do motor enquanto também se mantém a tensão do link DC dentro de uma faixa estreita é um desafio de controle, especialmente quando o veículo enfrenta subidas, acelerações ou outras mudanças súbitas. Controladores clássicos, ou mesmo muitos esquemas modernos baseados em aprendizado de máquina, podem sofrer com overshoot, acomodação lenta ou pesado custo computacional. Para enfrentar isso, o autor projeta um novo controlador chamado TIFDNFD, que amplia ideias de controle familiares com ajustes extras para afinar como o sistema reage aos erros. Em vez de depender de tentativa e erro para sintonia, o artigo usa um método de otimização inspirado no comportamento dos pássaros superb fairy-wren para escolher automaticamente os muitos parâmetros do controlador.
Sintonia inspirada na natureza por trás do capô
A rotina de otimização, modelada em como essas aves crescem, forrageiam e evitam predadores, explora possíveis configurações do controlador e mantém aquelas que fazem o acionamento se comportar melhor. Sua métrica orientadora é a rapidez e suavidade com que o erro do sistema desaparece ao longo do tempo. Em simulação, o algoritmo converge rapidamente para um conjunto de ajustes que reduzem fortemente o tempo que leva para a velocidade do motor se estabilizar após uma mudança, ao mesmo tempo em que diminui a oscilação de tensão e a ondulação de torque. Em comparação com várias alternativas avançadas, incluindo controladores por modo deslizante e baseados em redes neurais, a nova combinação atinge a velocidade alvo mais rápido, com overshoot muito menor e erro integrado reduzido.
O que as simulações revelam
Usando modelos detalhados em MATLAB/Simulink, o estudo testa a cadeia completa: bateria, conversor intercalado, inversor e motor BLDC. O conversor eleva os 250 V da bateria para aproximadamente 480 V e os mantém quase planos uma vez que o sistema inicializa, fornecendo ao inversor uma alimentação limpa. O inversor então produz tensões e correntes trifásicas bem balanceadas. O motor BLDC sobe rapidamente para cerca de 3000 rpm com apenas uma pequena elevação temporária acima do alvo, depois opera de forma estável com torque suave. Métricas chave, como tempo de pico, tempo de acomodação e uma medida padrão de erro acumulado, melhoram de forma perceptível em relação a esquemas de controle concorrentes.
O que isso significa para futuros veículos elétricos
Para um leitor leigo, a conclusão é que este trabalho oferece um “maestro” eletrônico mais refinado para a orquestra de componentes entre a bateria de um VE e suas rodas. Ao combinar um conversor de potência que reduz ondulação com um controlador altamente flexível e afinado automaticamente, o sistema pode reagir rapidamente às demandas do motorista enquanto mantém tensão e velocidade rigidamente reguladas. Na prática, isso pode se traduzir em acionamentos de VE que parecem mais suaves, desperdiçam menos energia e exigem menos esforço do hardware. Embora os resultados provenham de simulações e não de testes em estrada, eles sugerem um caminho promissor para sistemas de propulsão mais eficientes e responsivos em veículos e acionamentos elétricos industriais.
Citação: Alwabli, A. Efficient speed and voltage regulation of BLDC motor drive for EV applications using a multi-device interleaved DC–DC bidirectional converter with TIFDNFD–SFOA controller. Sci Rep 16, 14584 (2026). https://doi.org/10.1038/s41598-026-44960-0
Palavras-chave: veículos elétricos, acionamentos de motor BLDC, conversores DC–DC, controle avançado de motores, eletrônica de potência