Clear Sky Science · ru
Эффективное регулирование скорости и напряжения привода BLDC-двигателя для электромобилей с использованием многоустройственного межфазного двунаправленного DC–DC-преобразователя с контроллером TIFDNFD–SFOA
Почему важна более плавная работа электроприводов
По мере роста числа электромобилей водители ожидают от них не только экологичности, но и плавности, отзывчивости и надежности. За этим ощущением легкости стоит сложная цепочка электроники, которая одновременно должна координировать питание аккумулятора, скорость двигателя и стабильность напряжения. В статье рассматривается новый подход к управлению потоком энергии, позволяющий популярному типу электродвигателя работать эффективнее, с более быстрой реакцией и меньшими нежелательными колебаниями крутящего момента и скорости.
От батареи к колесам
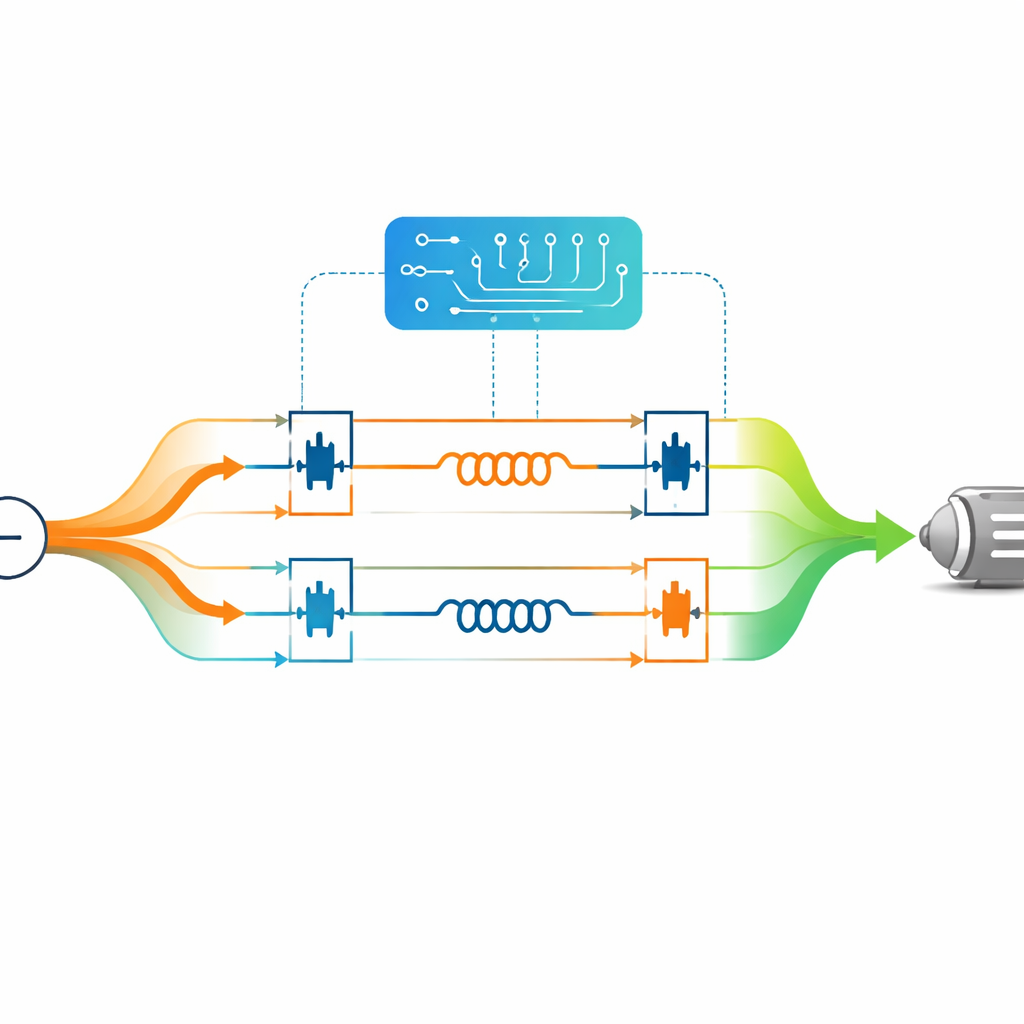
В типичном электромобиле батарея выдает постоянный ток (DC), который необходимо отрегулировать и затем преобразовать в переменный ток (AC) для привода бесщеточного постоянного двигателя (BLDC). Если напряжение, питающее инвертор двигателя, нестабильно или слабо реагирует на изменения нагрузки, автомобиль может казаться менее плавным и тратить больше энергии. Исследование сосредоточено на конкретном участке DC–DC — многоустройственном межфазном двунаправленном преобразователе. Вместо единого силового канала этот преобразователь разветвляет ток по нескольким параллельным ветвям, которые переключаются в тщательно сдвинутом по фазе режиме, а затем суммируются. Такая архитектура снижает электрические пульсации, улучшает распределение тока между элементами и удерживает напряжение постоянной шины стабильно при изменении нагрузки.
Более умный способ согласовать скорость и напряжение
Поддержание постоянной скорости двигателя при одновременном удержании напряжения постоянной шины в узком диапазоне — сложная задача управления, особенно когда автомобиль едет в гору, ускоряется или сталкивается с резкими изменениями. Классические регуляторы, а также многие современные схемы на базе машинного обучения могут страдать от перерегулирования, медленного установления или большой вычислительной нагрузки. Чтобы решить эту задачу, автор разрабатывает новый контроллер TIFDNFD, который расширяет привычные идеи управления дополнительными настройками для тонкой регулировки реакции системы на ошибки. Вместо настройки методом проб и ошибок в статье применяется оптимизация, вдохновленная поведением птиц superb fairy-wren, для автоматического подбора множества параметров контроллера.
Настройка, вдохновлённая природой, — под капотом
Оптимизационная процедура, смоделированная по образцу того, как эти птицы растут, добывают пищу и избегают хищников, исследует возможные настройки контроллера и сохраняет те, которые обеспечивают наилучшее поведение привода. Критерием служит то, насколько быстро и плавно ошибка системы уменьшается со временем. В моделировании алгоритм быстро сходится к набору параметров, который значительно сокращает время установления скорости двигателя после изменения, одновременно уменьшая пульсации напряжения и крутящего момента. По сравнению с несколькими современными альтернативами, включая скользящие режимы управления и контроллеры на базе нейронных сетей, новое сочетание быстрее достигает целевой скорости с гораздо меньшим перерегулированием и меньшей суммарной ошибкой.
Что показывают моделирования
С использованием детализированных моделей в MATLAB/Simulink исследование тестирует полную цепочку: батарею, межфазный преобразователь, инвертор и BLDC-двигатель. Преобразователь повышает напряжение батареи с 250 В примерно до 480 В и удерживает его практически постоянным после запуска системы, обеспечивая инвертор чистым питанием. Инвертор затем формирует сбалансированные трехфазные напряжения и токи. BLDC-двигатель быстро набирает около 3000 об/мин с лишь небольшой временной перегрузкой выше цели, затем работает устойчиво с плавным крутящим моментом. Ключевые показатели, такие как время достижения пика, время установления и стандартная мера накопленной ошибки, заметно улучшаются по сравнению с конкурирующими схемами управления.
Что это значит для будущих электромобилей
Для широкого читателя вывод таков: эта работа предлагает более утонченного электронного «дирижера» для оркестра компонентов между батареей электромобиля и его колесами. Сочетая преобразователь, снижающий пульсации, с автоматически настроенным гибким контроллером, система может быстрее реагировать на запросы водителя, одновременно строго контролируя напряжение и скорость. На практике это может означать, что приводы электромобилей станут ощущаться более плавными, будут тратить меньше энергии и меньше нагружать оборудование. Хотя результаты получены в моделированиях, а не на дорожных испытаниях, они указывают на перспективный путь к более эффективным и отзывчивым силовым установкам как в автомобилях, так и в промышленных электроприводах.
Цитирование: Alwabli, A. Efficient speed and voltage regulation of BLDC motor drive for EV applications using a multi-device interleaved DC–DC bidirectional converter with TIFDNFD–SFOA controller. Sci Rep 16, 14584 (2026). https://doi.org/10.1038/s41598-026-44960-0
Ключевые слова: электромобили, приводы BLDC-двигателей, DC–DC-преобразователи, современное управление двигателями, силовая электроника