Clear Sky Science · it
Regolazione efficiente di velocità e tensione per azionamenti BLDC nelle applicazioni EV usando un convertitore DC–DC bidirezionale interleaved multi-dispositivo con controllore TIFDNFD–SFOA
Perché gli azionamenti elettrici più fluidi sono importanti
Con la diffusione dei veicoli elettrici, gli utenti si aspettano non solo soluzioni pulite, ma anche prestazioni fluide, reattive e affidabili. Dietro a quella sensazione di facilità si nasconde una catena complessa di elettronica che deve gestire contemporaneamente la potenza della batteria, la velocità del motore e la stabilità della tensione. Questo articolo esplora un nuovo modo di modulare quel flusso di energia affinché un tipo diffuso di motore elettrico lavori in modo più efficiente, con risposta più rapida e meno ondulazioni indesiderate nella coppia e nella velocità.
Dalla batteria alle ruote
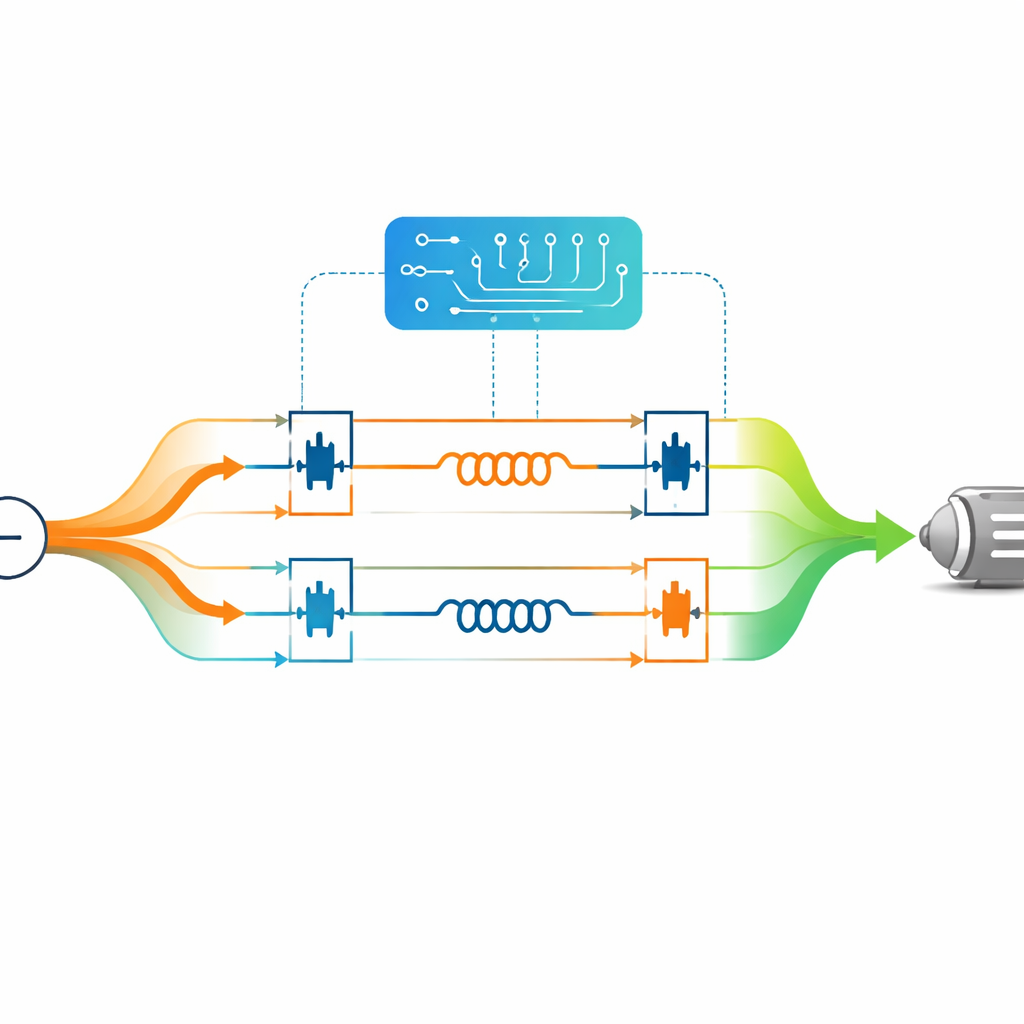
In un’auto elettrica tipica, la batteria fornisce corrente continua (DC) che va prima adattata e poi trasformata in corrente alternata (AC) per pilotare un motore brushless DC (BLDC). Se la tensione che alimenta l’inverter del motore oscilla o risponde lentamente alle variazioni di carico, il veicolo può risultare meno fluido e sprecare energia. Lo studio si concentra su uno stadio DC–DC particolare chiamato convertitore bidirezionale interleaved multi-dispositivo. Invece di un singolo percorso di potenza, questo convertitore suddivide la corrente in più rami paralleli che commutano con uno sfasamento controllato e poi si ricombinano. Questa disposizione riduce le ondulazioni elettriche, migliora la condivisione di corrente tra i componenti e mantiene stabile la tensione del link DC anche al variare del carico.
Un modo più intelligente per mantenere velocità e tensione allineate
Mantenere una velocità motore costante contemporaneamente a una tensione di link DC entro una banda ristretta è una sfida di controllo, specialmente quando il veicolo affronta salite, accelerazioni o altri cambiamenti repentini. I controllori classici, o anche molti schemi moderni basati su apprendimento automatico, possono soffrire di sovraelongazione, assestamento lento o elevato carico computazionale. Per affrontare questo problema, l’autore progetta un nuovo controllore chiamato TIFDNFD, che estende idee di controllo consolidate con parametri aggiuntivi per rifinire la reazione del sistema agli errori. Invece di affidarsi alla taratura empirica, l’articolo utilizza un metodo di ottimizzazione ispirato al comportamento del superb fairy-wren per scegliere automaticamente i numerosi parametri del controllore.
Tuning ispirato alla natura sotto il cofano
La routine di ottimizzazione, modellata su come questi uccelli crescono, cercano cibo ed evitano i predatori, esplora possibili impostazioni del controllore e mantiene quelle che fanno comportare meglio l’azionamento. La misura guida è la rapidità e la regolarità con cui l’errore del sistema si estingue nel tempo. Nelle simulazioni, l’algoritmo converge rapidamente verso un insieme di parametri che riducono nettamente il tempo di assestamento della velocità motore dopo una variazione, riducendo al contempo l’ondulazione di tensione e la ripple della coppia. Rispetto a diverse alternative avanzate, inclusi controllori a sliding-mode e basati su reti neurali, la nuova combinazione raggiunge la velocità obiettivo più rapidamente, con overshoot molto minore e minore errore integrato.
Cosa rivelano le simulazioni
Utilizzando modelli dettagliati in MATLAB/Simulink, lo studio testa l’intera catena: batteria, convertitore interleaved, inverter e motore BLDC. Il convertitore innalza i 250 V della batteria fino a circa 480 V e li mantiene quasi costanti una volta avviato il sistema, fornendo all’inverter un’alimentazione pulita. L’inverter genera quindi tensioni e correnti trifase ben bilanciate. Il motore BLDC accelera rapidamente fino a circa 3000 rpm con solo un piccolo sovraccarico temporaneo rispetto all’obiettivo, quindi lavora stabilmente con coppia uniforme. Metriche chiave come tempo di picco, tempo di assestamento e una misura standard dell’errore accumulato migliorano in modo significativo rispetto agli schemi di controllo concorrenti.
Cosa significa per i futuri veicoli elettrici
Per un lettore non specialista, la conclusione è che questo lavoro offre un “direttore d’orchestra” elettronico più sofisticato per la catena di componenti tra la batteria di un veicolo elettrico e le sue ruote. Abbinando un convertitore di potenza che riduce le ripple a un controllore altamente flessibile e sintonizzato automaticamente, il sistema può reagire rapidamente alle richieste del guidatore mantenendo tensione e velocità strettamente regolate. In pratica, questo potrebbe tradursi in azionamenti EV più fluidi, con minori perdite energetiche e minore stress sull’hardware. Sebbene i risultati derivino da simulazioni e non da prove su strada, indicano una strada promettente verso sistemi di propulsione più efficienti e reattivi, sia per i veicoli sia per gli azionamenti elettrici industriali.
Citazione: Alwabli, A. Efficient speed and voltage regulation of BLDC motor drive for EV applications using a multi-device interleaved DC–DC bidirectional converter with TIFDNFD–SFOA controller. Sci Rep 16, 14584 (2026). https://doi.org/10.1038/s41598-026-44960-0
Parole chiave: veicoli elettrici, azionamenti motore BLDC, convertitori DC–DC, controllo avanzato dei motori, elettronica di potenza