Clear Sky Science · es
Regulación eficiente de velocidad y tensión de accionamientos BLDC para aplicaciones de VE usando un convertidor bidireccional DC–DC intercalado multi-dispositivo con controlador TIFDNFD–SFOA
Por qué importan los sistemas de tracción más suaves
A medida que los vehículos eléctricos se generalizan, los conductores esperan que sean no solo limpios sino también suaves, sensibles y fiables. Tras esa sensación sin esfuerzo hay una cadena compleja de electrónica que debe gestionar a la vez la energía de la batería, la velocidad del motor y la estabilidad de la tensión. Este artículo explora una nueva forma de dirigir ese flujo de energía para que un tipo popular de motor eléctrico funcione con mayor eficiencia, con una respuesta más rápida y menos ondulaciones indeseadas en el par y la velocidad.
De la batería a las ruedas
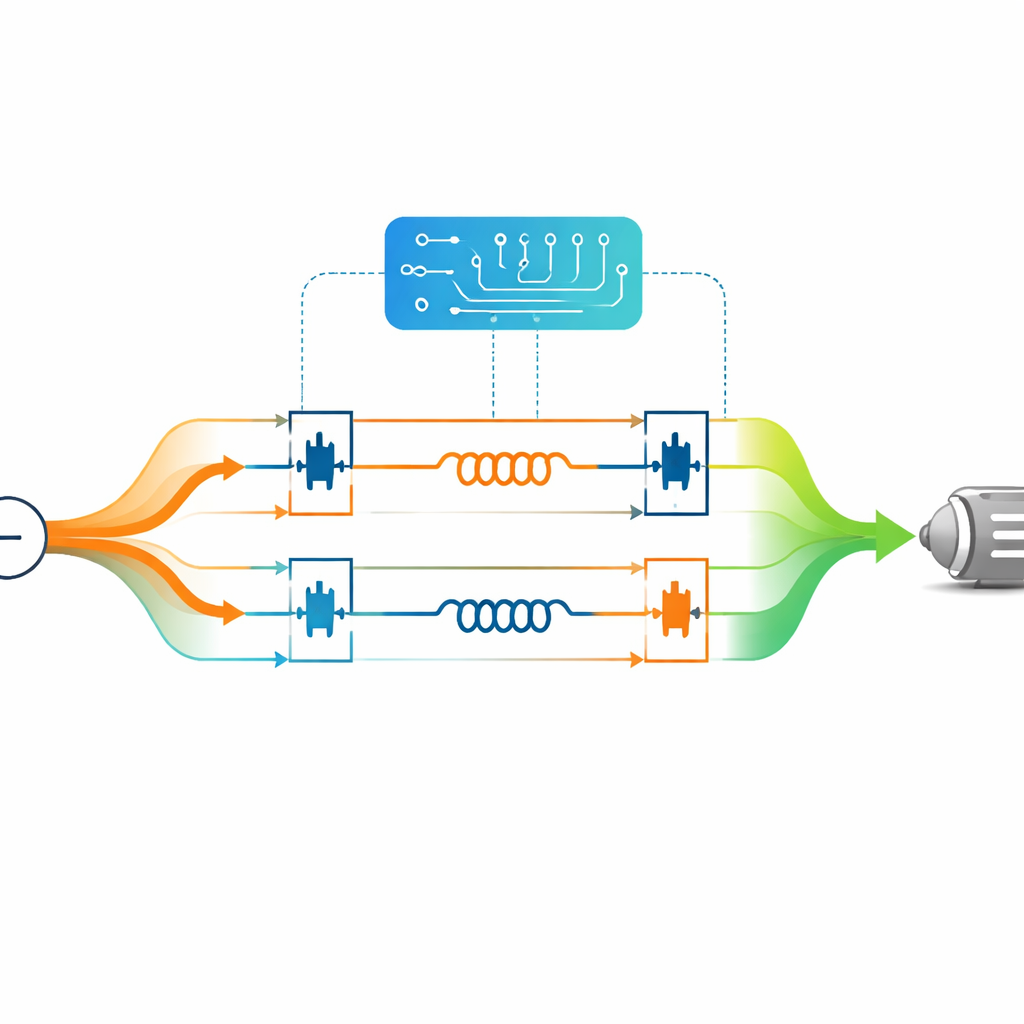
En un coche eléctrico típico, la batería suministra corriente continua (CC) que debe ajustarse y luego convertirse en corriente alterna (CA) para accionar un motor BLDC (sin escobillas). Si la tensión que alimenta el inversor del motor oscila o responde con lentitud a los cambios de demanda, el vehículo puede sentirse menos suave y gastar más energía. El estudio se centra en una etapa DC–DC particular denominada convertidor bidireccional intercalado multi-dispositivo. En lugar de un único camino de potencia, este convertidor divide la corriente en varias ramas paralelas que conmutan con un patrón cuidadosamente desplazado y luego se recombinan. Esta disposición reduce la ondulación eléctrica, mejora la compartición de corriente entre los componentes y mantiene la tensión del enlace CC estable incluso cuando cambia la carga.
Una forma más inteligente de mantener velocidad y tensión alineadas
Mantener una velocidad constante del motor a la vez que se sostiene la tensión del enlace CC dentro de una banda estrecha es un reto de control, especialmente cuando el vehículo afronta cuestas, aceleraciones u otros cambios bruscos. Los controladores clásicos, o incluso muchos esquemas modernos basados en aprendizaje automático, pueden sufrir sobreimpulso, asentamiento lento o una carga computacional elevada. Para abordarlo, el autor diseña un nuevo controlador llamado TIFDNFD, que amplía ideas de control familiares con perillas adicionales para afinar cómo reacciona el sistema ante los errores. En lugar de recurrir a la afinación por prueba y error, el artículo emplea un método de optimización inspirado en el comportamiento de los maláuridos (superb fairy-wren) para seleccionar automáticamente los numerosos parámetros del controlador.
Optimización inspirada en la naturaleza bajo el capó
La rutina de optimización, modelada según cómo estas aves crecen, forrajean y evitan depredadores, explora posibles ajustes del controlador y conserva los que hacen que el accionamiento se comporte mejor. Su medida guía es la rapidez y suavidad con la que el error del sistema se extingue a lo largo del tiempo. En simulación, el algoritmo converge rápidamente a un conjunto de parámetros que reduce drásticamente el tiempo que tarda la velocidad del motor en estabilizarse tras un cambio, al tiempo que disminuye la oscilación de la tensión y la ondulación del par. En comparación con varias alternativas avanzadas, incluidos controladores por modo deslizante y basados en redes neuronales, la nueva combinación alcanza la velocidad objetivo más rápido, con mucho menos sobreimpulso y menor error acumulado.
Lo que revelan las simulaciones
Usando modelos detallados en MATLAB/Simulink, el estudio prueba la cadena completa: batería, convertidor intercalado, inversor y motor BLDC. El convertidor eleva los 250 V de la batería hasta aproximadamente 480 V y los mantiene casi planos una vez que el sistema ha arrancado, proporcionando al inversor una alimentación limpia. El inversor produce entonces tensiones y corrientes trifásicas bien equilibradas. El motor BLDC acelera rápidamente hasta alrededor de 3000 rpm con solo una pequeña subida temporal por encima del objetivo, y luego funciona de forma estable con par suave. Métricas clave como tiempo pico, tiempo de asentamiento y una medida estándar del error acumulado mejoran de forma notable frente a los esquemas de control competidores.
Qué significa esto para los futuros vehículos eléctricos
Para un lector no especialista, la conclusión es que este trabajo ofrece un “director” electrónico más refinado para la orquesta de componentes entre la batería de un VE y sus ruedas. Al combinar un convertidor de potencia que reduce la ondulación con un controlador altamente flexible afinado automáticamente, el sistema puede reaccionar rápidamente a las demandas del conductor manteniendo la tensión y la velocidad estrictamente reguladas. En la práctica, esto podría traducirse en accionamientos de VE que se sientan más suaves, desperdicien menos energía y ejerzan menos estrés sobre el hardware. Aunque los resultados provienen de simulaciones y no de pruebas en carretera, sugieren una vía prometedora hacia sistemas de propulsión más eficientes y sensibles, tanto en vehículos como en accionamientos eléctricos industriales.
Cita: Alwabli, A. Efficient speed and voltage regulation of BLDC motor drive for EV applications using a multi-device interleaved DC–DC bidirectional converter with TIFDNFD–SFOA controller. Sci Rep 16, 14584 (2026). https://doi.org/10.1038/s41598-026-44960-0
Palabras clave: vehículos eléctricos, accionamientos de motores BLDC, convertidores DC–DC, control avanzado de motores, electrónica de potencia