Clear Sky Science · nl
Efficiënte snelheids- en spanningsregeling van BLDC-motoraandrijving voor EV-toepassingen met een meerapparaat-interleaved DC–DC-bidirectionele converter en TIFDNFD–SFOA-controller
Waarom soepelere elektrische aandrijvingen ertoe doen
Naarmate elektrische voertuigen vaker voorkomen, verwachten bestuurders dat ze niet alleen schoon zijn, maar ook soepel, responsief en betrouwbaar. Achter dat moeiteloze gevoel schuilt een complexe keten van elektronica die batterijvermogen, motorsnelheid en spanningsstabiliteit tegelijk moet balanceren. Dit artikel onderzoekt een nieuwe manier om die energiestroom te sturen zodat een veelgebruikt type elektromotor efficiënter draait, met snellere respons en minder ongewenste rimpels in koppel en snelheid.
Van batterij naar wielen
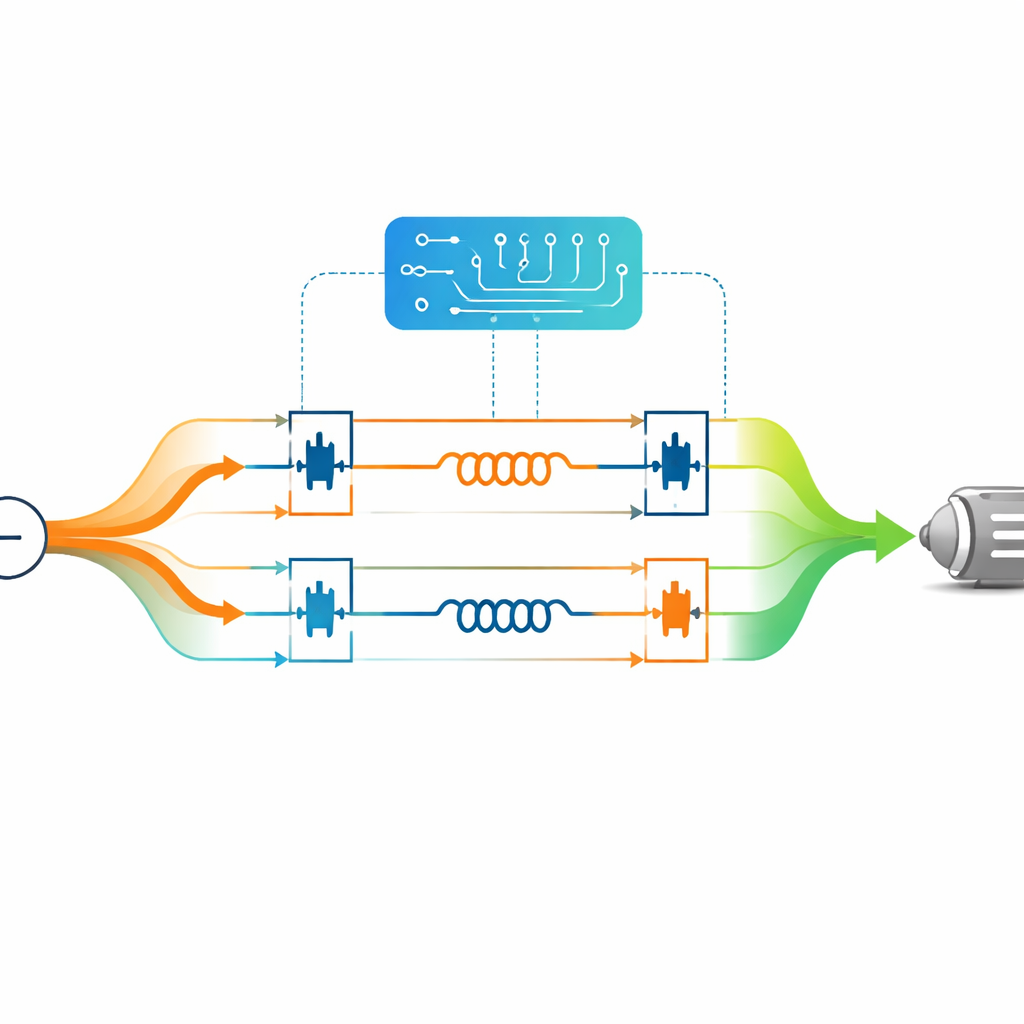
In een typisch elektrische auto levert de batterij gelijkstroom (DC) die moet worden aangepast en vervolgens omgezet in wisselstroom (AC) om een borstelloze DC (BLDC) motor aan te drijven. Als de spanning die de inverter van de motor voedt gaat wiebelen of traag reageert op veranderende vraag, kan het voertuig minder soepel aanvoelen en energie verspillen. De studie richt zich op een specifieke DC–DC-tretrap: een meerapparaat-interleaved bidirectionele converter. In plaats van één stroompad splitst deze converter de stroom in meerdere parallelle takken die in een zorgvuldig verschoven patroon schakelen en dan weer worden samengevoegd. Deze opzet vermindert elektrische rimpel, verbetert het delen van stroom tussen componenten en houdt de DC-koppelspanningsbus stabiel, zelfs wanneer de belasting verandert.
Een slimere manier om snelheid en spanning op elkaar af te stemmen
Een constante motorsnelheid handhaven terwijl ook de DC-busspanning binnen nauwe grenzen wordt gehouden is een regeluitdaging, zeker wanneer het voertuig heuvels tegenkomt, accelereert of andere plotselinge veranderingen doormaakt. Klassieke regelaars, en zelfs veel moderne op machine learning gebaseerde schema’s, kunnen last hebben van overshoot, traag inslingeren of hoge rekenkundige belasting. Om dit aan te pakken ontwerpt de auteur een nieuwe regelaar genaamd TIFDNFD, die vertrouwde regelideeën uitbreidt met extra knoppen om fijn af te stemmen hoe het systeem op fouten reageert. In plaats van te vertrouwen op proef-en-fout-tuning, gebruikt het artikel een optimalisatiemethode geïnspireerd door het gedrag van de superb fairy-wren (een vogel) om automatisch de vele parameters van de regelaar te kiezen.
Natuur-geïnspireerde afstemming onder de motorkap
De optimalisatieroutine, gemodelleerd naar hoe deze vogels groeien, foerageren en predators vermijden, onderzoekt mogelijke regelinstellingen en behoudt de instellingen die de aandrijving het beste laten presteren. Het leidende criterium is hoe snel en vloeiend de fout van het systeem in de tijd wegsterft. In simulatie convergeert het algoritme snel naar een set instellingen die de tijd die de motorsnelheid nodig heeft om na een wijziging te stabiliseren scherp verkort, terwijl ook spanningswiebels en koppelrimpel worden verminderd. Vergeleken met meerdere geavanceerde alternatieven, waaronder sliding-mode en neurale-netwerkgebaseerde regelaars, bereikt de nieuwe combinatie de doelsnelheid sneller, met veel minder overshoot en een lagere geïntegreerde fout.
Wat de simulaties onthullen
Met gedetailleerde modellen in MATLAB/Simulink test de studie de volledige keten: batterij, interleaved converter, inverter en BLDC-motor. De converter verhoogt de batterijspanning van 250 V tot ongeveer 480 V en houdt die na opstart vrijwel vlak, waardoor de inverter een schone voeding krijgt. De inverter genereert vervolgens goed gebalanceerde driefasige spanningen en stromen. De BLDC-motor loopt snel op tot ongeveer 3000 rpm met slechts een kleine tijdelijke overschrijding van de doelwaarde, en draait daarna stabiel met soepel koppel. Belangrijke maatstaven zoals piektijd, inslingertijd en een standaard maat voor opgetelde fout verbeteren allemaal merkbaar ten opzichte van concurrerende regelschema’s.
Wat dit betekent voor toekomstige elektrische voertuigen
Voor een niet-specialistische lezer is de conclusie dat dit werk een verfijndere elektronische “dirigent” biedt voor het orkest van componenten tussen de batterij van een EV en zijn wielen. Door een rimpelverminderende stroomomzetter te combineren met een automatisch afgestemde, zeer flexibele regelaar, kan het systeem snel reageren op wensen van de bestuurder terwijl spanning en snelheid strak gereguleerd blijven. In de praktijk kan dit zich vertalen naar EV-aandrijvingen die soepeler aanvoelen, minder energie verspillen en minder stress op de hardware zetten. Hoewel de resultaten uit simulaties en niet uit testritten op de weg komen, wijzen ze op een veelbelovende weg naar efficiëntere en responsievere voortstuwingssystemen in zowel voertuigen als industriële elektrische aandrijvingen.
Bronvermelding: Alwabli, A. Efficient speed and voltage regulation of BLDC motor drive for EV applications using a multi-device interleaved DC–DC bidirectional converter with TIFDNFD–SFOA controller. Sci Rep 16, 14584 (2026). https://doi.org/10.1038/s41598-026-44960-0
Trefwoorden: elektrische voertuigen, BLDC-motoraandrijvingen, DC–DC-converters, geavanceerde motorregeling, vermogenselektronica