Clear Sky Science · sv
Lågfrekevensdatabehandling och egenskaper hos Tianwen-1:s Mars-roverpenetrationsradar
Varför det spelar roll att se under Mars yta
I årtionden har forskare undrat om Mars en gång haft ett nordligt hav. Spåren efter den forna strandlinjen, om den existerade, ligger nu begravda under damm och bergarter. Kinas Zhurong-rover, en del av Tianwen-1-uppdraget, bär på en lågfrekevens markpenetrerande radar som kan ”se” ungefär 100 meter under Mars yta. Denna artikel förklarar hur forskarna noggrant rensade och analyserade radardata och vad de fann: lutande begravda lager som mycket liknar kustavlagringar, vilket ger nya ledtrådar om ett försvunnet marsshav.
Den dolda uppdelningen på Mars
Mars är delat i två mycket olika världar. Den södra halvan är hög, skrovlig och slagen av forntida kratrar. Den norra halvan är lägre, jämnare och inkluderar en vidsträckt region kallad Utopia Planitia. Många landformer längs gränsen mellan dessa områden—dalar, deltan och sjöbassänger—tyder på att vatten en gång flöt nedåt till de norra låglanden och möjligen bildade ett hav som täckte ungefär en tredjedel av planeten. I dagens Utopia Planitia antyder märkliga former som flikiga sänkor och polygonmönster begravd is, men den detaljerade berättelsen om detta misstänkta hav har förblivit svårfattad eftersom de avgörande ledtrådarna ligger under markytan.
En rover som lyssnar på marken
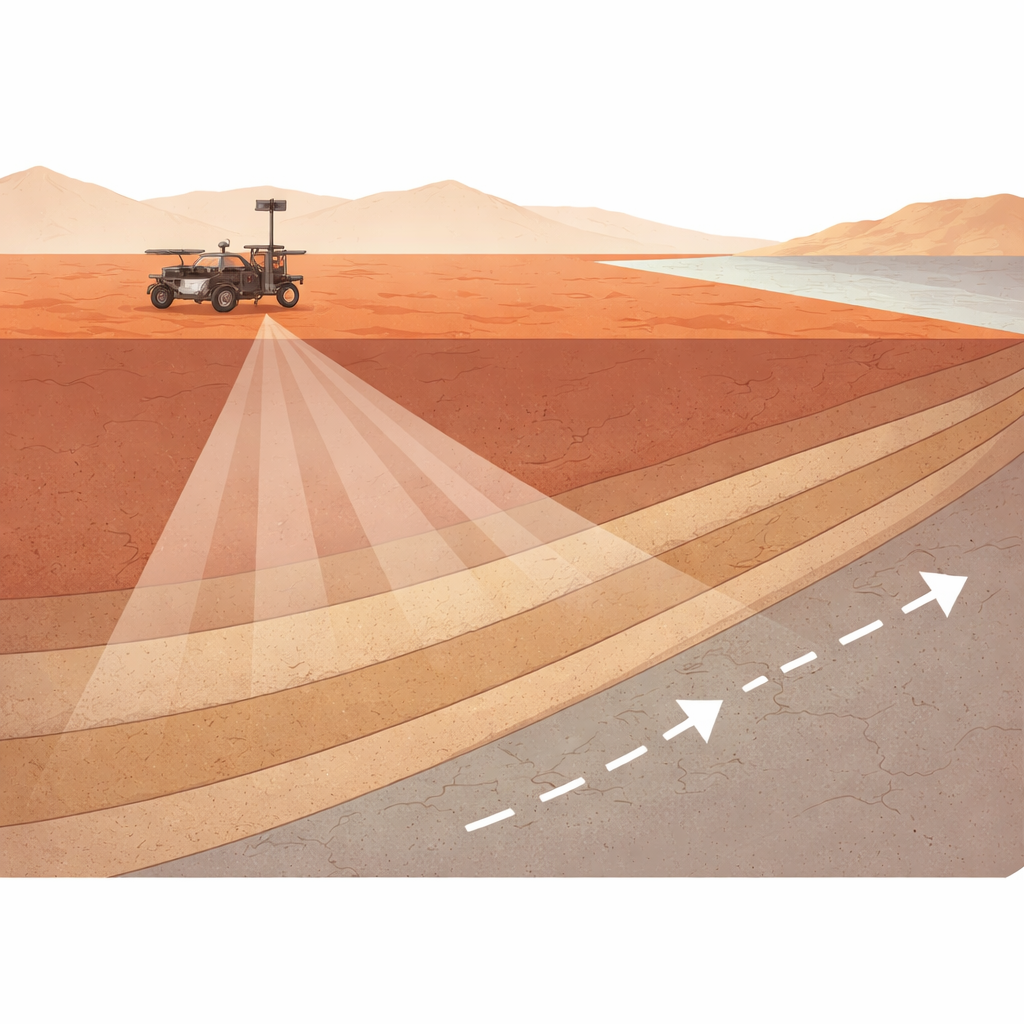
Zhurong-rovern landade i södra Utopia Planitia i maj 2021 och började köra över ytan en vecka senare. Monterad på chassit finns ett tvåkanaligt radarsystem kallat Mars Rover Penetrating Radar, eller RoPeR. Den ena kanalen använder högre frekvenser för att kartlägga grunda strukturer i detalj; den andra, som är fokus i denna studie, använder lägre frekvenser mellan 15 och 95 megahertz för att nå djup på ungefär 100 meter. När rovern körde nästan två kilometer skickade lågfrekevensradarn upprepade pulser in i marken och registrerade ekona, och byggde därigenom upp en kontinuerlig profil av dolda lager under dess väg.
Rensa upp en brusig bild av underjorden
Råa radardata från en rörlig rover är röriga. Ekona studsar inte bara från underjordiska lager utan också från roverns egen kropp och ytan direkt under den, och radarens timing kan skifta något från spår till spår. Teamet laddade först ner all offentligt tillgänglig data och kombinerade 109 separata filer till en enda, konsekvent datamängd. De tog bort interna ”självtest”-pulser som inte innehöll geologisk information, korrigerade små tidsskiftningar med en korskorrelationsmetod för att aligna vågformerna, och resamplade en del av datan så att avståndet mellan mätningarna blev enhetligt 25 centimeter längs roverns färd. Därefter tillämpade de en serie standardsteg—normalisering av energi, borttagning av konstanta offset och breda bakgrundssignaler, filtrering av oönskade frekvenser, beskärning av tidiga artefakter och förstärkning av djupare ekon—för att skärpa verkliga underjordiska reflektioner.
Bestämma hur djupt signalen når
En avgörande fråga är hur långt ner radarn verkligen ser verkliga strukturer snarare än bara brus. Forskarna undersökte hur den genomsnittliga signalstyrkan och dess variabilitet förändrades med tiden efter varje puls, vilket motsvarar djup. Båda måtten sjönk stadigt och planar sedan ut kring en viss fördröjning, vilket indikerar den punkt där meningsfulla ekon övergick i bakgrundsbrus. De drog slutsatsen att signaler registrerade inom ungefär 1,5 mikrosekunder efter varje puls fortfarande bar geologisk information, medan senare signaler mestadels var brus. Detta gjorde det möjligt för dem att fokusera på det djupintervall instrumentet verkligen kunde urskilja.
Avslöja begravda lutande lager
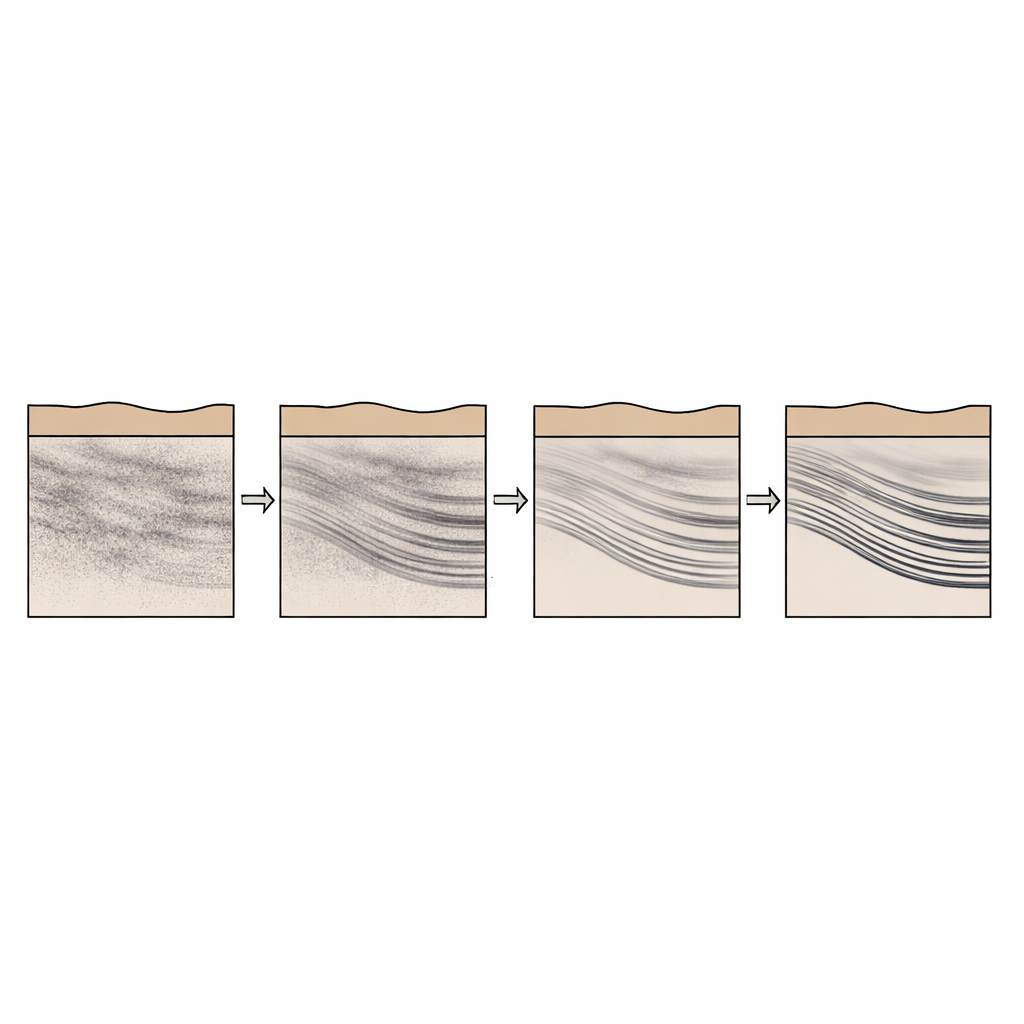
Efter att ha rensat datan använde teamet en teknik kallad migration för att återplacera reflektioner till sina korrekta underjordiska positioner och omvandla signalernas restid till djup, med rimliga antaganden om Mars jords elektriska egenskaper. De korrigerade sedan radarbilden för subtila förändringar i markhöjd med hjälp av höjdinformation från Zhurongs navigationskamera, så att underjordiska lager kunde jämföras rättvist längs hela spåret. De slutliga radargrammen visar en serie distinkta reflektorer—ljusa, krökta band—som lutar mot de norra låglanden mellan ungefär 10 och 35 meter under ytan. Forskarna mätte position, djup och lutningsvinkel för 76 sådana strukturer och fann att deras vinklar och arrangemang stämmer överens med den typ av sluttande föreset-lager som vanligtvis bildas där sediment byggs ut längs en strandlinje.
Vad detta betyder för Mars förlorade hav
För att göra sitt arbete brett användbart publicerade författarna inte bara de råa och bearbetade radarprofilerna utan även bearbetningskoden och mätningarna av samtliga 76 lutande reflektorer. Oberoende jämförelser med tidigare studier visar att deras metod förbättrar tydligheten i grunda strukturer utan att introducera uppenbara artefakter. För icke-specialister är huvudslutsatsen att genom att noggrant lyssna på svaga ekon under Mars yta kartlägger forskare nu vad som verkar vara forntida kustavlagringar i Utopia Planitia. Dessa begravda lutande lager stärker idén att en stor vattenmassa en gång fyllde Mars norra lågland—och att dess strandlinje, trots att den är försvunnen för ögat, fortfarande är skriven under marken.
Citering: Li, J., Chen, Z., Meng, X. et al. Low-Frequency Data Processing and Characteristics of Tianwen-1 Mars Rover Penetrating Radar. Sci Data 13, 674 (2026). https://doi.org/10.1038/s41597-026-07034-4
Nyckelord: Mars-ocean, markpenetrerande radar, Utopia Planitia, Zhurong-rovern, marstiisk underyta