Clear Sky Science · fr
Traitement des données basse fréquence et caractéristiques du radar pénétrant du rover martien Tianwen-1
Pourquoi regarder sous la surface de Mars importe
Pendant des décennies, les scientifiques se sont demandé si Mars avait autrefois un océan septentrional. Les traces de ce rivage ancien, si elles ont existé, sont aujourd’hui enfouies sous la poussière et la roche. Le rover Zhurong de la mission Tianwen-1 emporte un radar pénétrant basse fréquence capable de « voir » jusqu’à environ 100 mètres sous la surface martienne. Cet article explique comment les chercheurs ont soigneusement nettoyé et analysé ces données radar et ce qu’ils ont trouvé : des couches enfouies inclinées qui ressemblent fortement à des dépôts côtiers, apportant de nouveaux indices sur une mer martienne disparue.
La séparation cachée de Mars
Mars est divisée en deux mondes très différents. La moitié sud est élevée, accidentée et criblée de cratères anciens. La moitié nord est plus basse, plus lisse, et comprend une vaste région appelée Utopia Planitia. De nombreuses formes de relief le long de la frontière entre ces régions — vallées, deltas et bassins lacustres — suggèrent que l’eau a autrefois coulé vers les basses terres du nord, formant possiblement un océan qui couvrait environ un tiers de la planète. Dans Utopia Planitia aujourd’hui, des formes étranges comme des dépressions en coquille et des motifs polygonaux évoquent la présence de glace enfouie, mais l’histoire détaillée de cet océan suspecté est restée insaisissable parce que les indices cruciaux se trouvent sous la surface.
Un rover qui écoute le sol
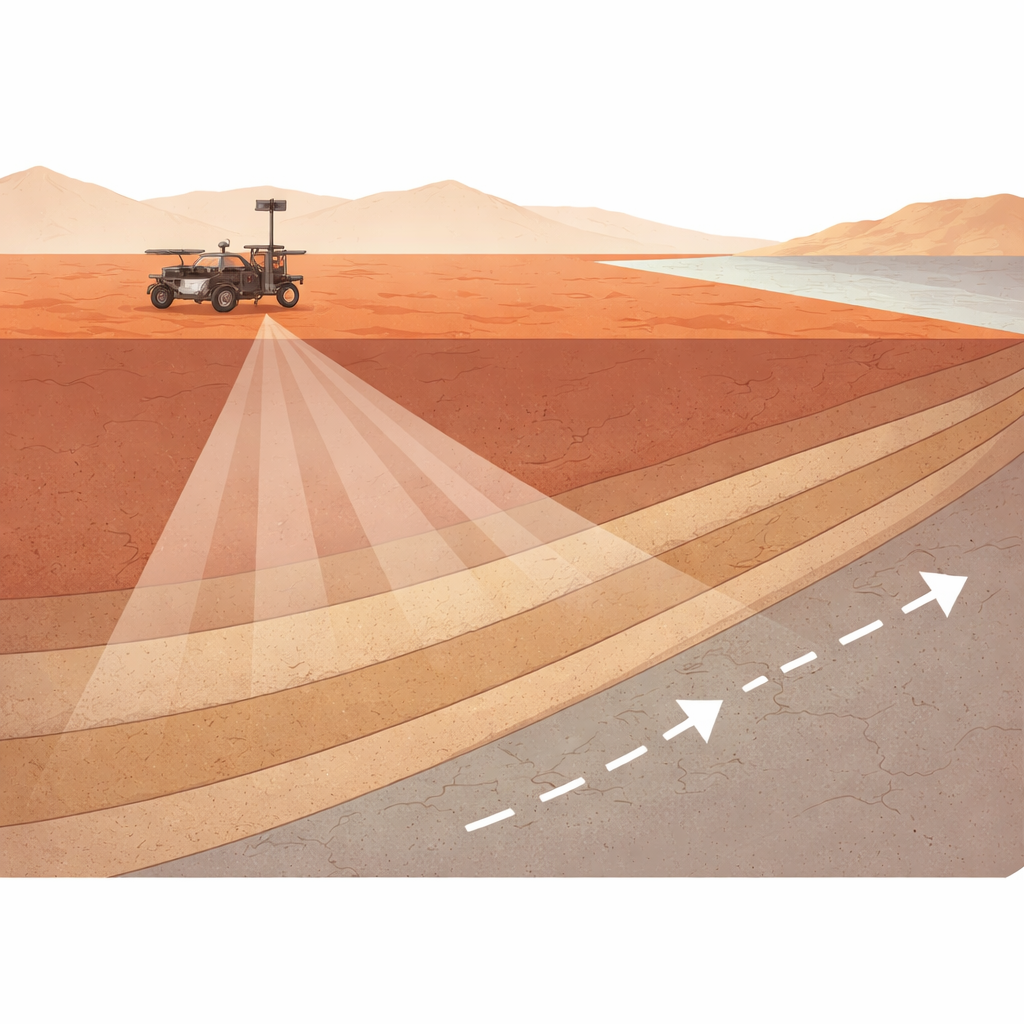
Le rover Zhurong a atterri dans le sud d’Utopia Planitia en mai 2021 et a commencé à se déplacer une semaine plus tard. Monté sur son châssis se trouve un système radar à deux canaux appelé Mars Rover Penetrating Radar, ou RoPeR. Un canal utilise des fréquences plus élevées pour cartographier les caractéristiques superficielles avec un grand détail ; l’autre, qui est l’objet de cette étude, utilise des fréquences plus basses entre 15 et 95 mégahertz pour atteindre des profondeurs d’environ 100 mètres. Alors que le rover a parcouru près de deux kilomètres, le radar basse fréquence a envoyé des impulsions répétées dans le sol et enregistré les échos, constituant un profil continu des couches cachées sous sa trajectoire.
Nettoyer une image souterraine bruyante
Les données radar brutes d’un rover en mouvement sont désordonnées. Les échos proviennent non seulement des couches souterraines mais aussi de la structure même du rover et de la surface immédiatement sous lui, et la synchronisation du radar peut varier légèrement d’un enregistrement à l’autre. L’équipe a d’abord téléchargé toutes les données publiquement diffusées et combiné 109 fichiers séparés en un jeu de données unique et cohérent. Ils ont supprimé les impulsions de « test interne » ne portant aucune information géologique, corrigé de minuscules décalages temporels en alignant les formes d’onde par corrélation croisée, et rééchantillonné une partie des données pour uniformiser l’espacement entre mesures à 25 centimètres le long de la trajectoire du rover. Ils ont ensuite appliqué une série d’étapes standard : normalisation de l’énergie, suppression des décalages constants et des signaux de fond larges, filtrage des fréquences indésirables, élagage des artefacts en temps précoce et amplification des échos profonds — afin d’affiner les véritables réflexions souterraines.
Déterminer jusqu’où le signal atteint
Une question cruciale est de savoir jusqu’à quelle profondeur le radar distingue réellement des structures et non simplement le bruit. Les chercheurs ont examiné comment la puissance moyenne du signal et sa variabilité évoluaient avec le temps après chaque impulsion, ce qui correspond à la profondeur. Les deux mesures décroissent progressivement puis se stabilisent autour d’un certain retard, indiquant le point où les échos significatifs se fondent dans le bruit de fond. Ils ont conclu que les signaux enregistrés dans les ~1,5 microsecondes suivant chaque impulsion contenaient encore de l’information géologique, tandis que les signaux ultérieurs étaient principalement du bruit. Cela leur a permis de se concentrer sur la gamme de profondeur réellement résolue par l’instrument.
Révéler des couches enfouies en pente
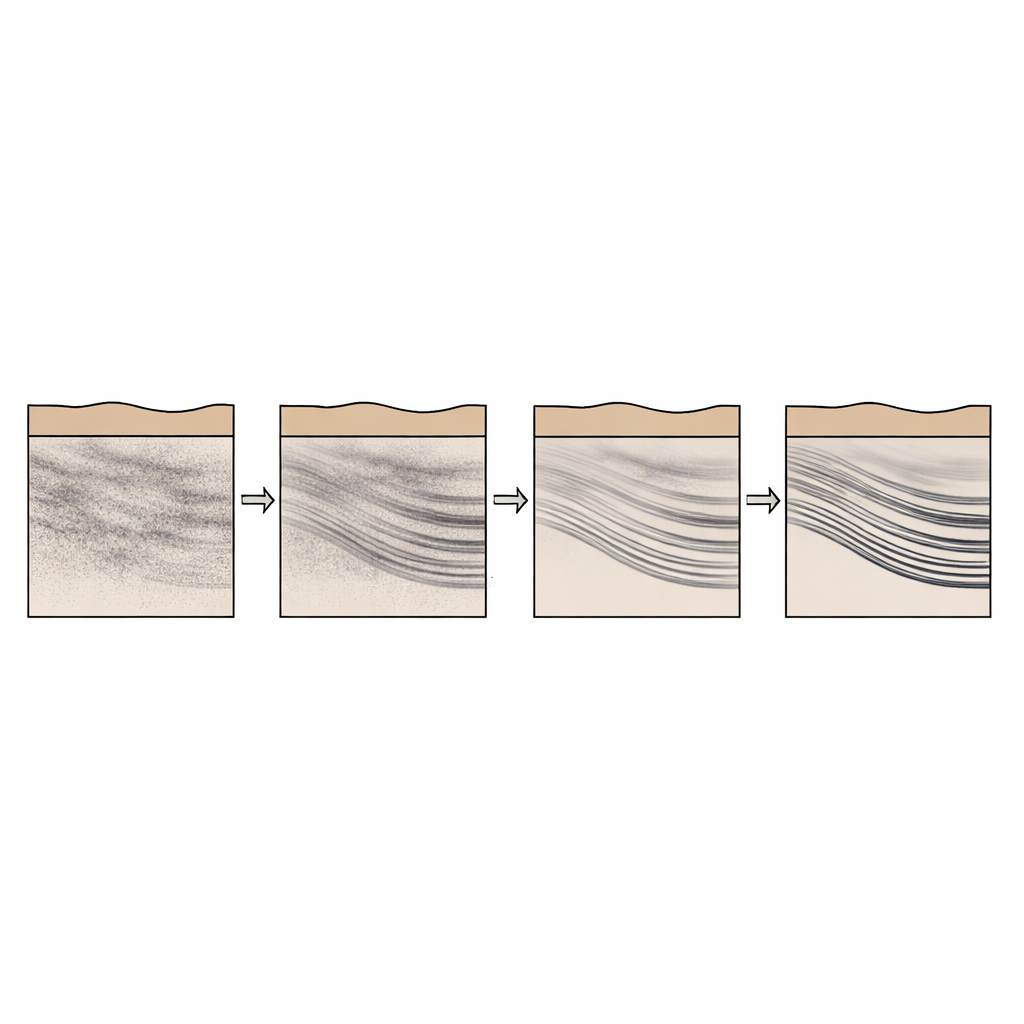
Après le nettoyage des données, l’équipe a utilisé une technique appelée migration pour repositionner les réflexions à leur emplacement souterrain correct et convertir les temps de trajet du signal en profondeur, en supposant des propriétés électriques raisonnables pour le sol martien. Ils ont ensuite corrigé l’image radar pour de subtiles variations de la hauteur de surface en utilisant les données d’élévation de la caméra de navigation de Zhurong, afin que les couches souterraines puissent être comparées de manière équitable le long de toute la trajectoire. Les radargrammes finaux montrent une série de réflecteurs distincts — bandes brillantes et courbées — s’inclinant vers les basses terres du nord entre environ 10 et 35 mètres sous la surface. Les chercheurs ont mesuré la position, la profondeur et l’angle d’inclinaison de 76 de ces caractéristiques et ont constaté que leurs angles et leur agencement correspondent au type de lits foisonnants inclinés typiquement formés là où des sédiments se déposent vers l’extérieur le long d’un rivage.
Ce que cela signifie pour la mer perdue de Mars
Pour rendre leur travail largement utile, les auteurs ont publié non seulement les profils radar bruts et traités mais aussi le code de traitement et les mesures des 76 réflecteurs inclinés. Des comparaisons indépendantes avec des études antérieures montrent que leur approche améliore la clarté des structures peu profondes sans introduire d’artefacts évidents. Pour le grand public, l’essentiel est que, en écoutant attentivement de faibles échos sous la surface de Mars, les scientifiques cartographient désormais ce qui semble être des dépôts côtiers anciens dans Utopia Planitia. Ces couches enfouies en pente renforcent l’idée qu’un vaste volume d’eau a autrefois rempli les basses terres du nord de Mars — et que son littoral, bien que disparu à l’œil nu, reste inscrit sous la surface.
Citation: Li, J., Chen, Z., Meng, X. et al. Low-Frequency Data Processing and Characteristics of Tianwen-1 Mars Rover Penetrating Radar. Sci Data 13, 674 (2026). https://doi.org/10.1038/s41597-026-07034-4
Mots-clés: océan martien, radar pénétrant, Utopia Planitia, rover Zhurong, subsurface martien