Clear Sky Science · de
Verarbeitung tieffrequenter Daten und Eigenschaften des eindringenden Radars des Tianwen-1-Marsrovers
Warum es wichtig ist, unter die Oberfläche des Mars zu blicken
Seit Jahrzehnten fragen sich Wissenschaftler, ob der Mars einst einen nördlichen Ozean besaß. Die Spuren jener alten Küstenlinie wären, falls sie existierte, heute unter Staub und Gestein vergraben. Chinas Zhurong-Rover, Teil der Tianwen-1-Mission, trägt ein tieffrequentes bodendurchdringendes Radar, das bis etwa 100 Meter unter die Marsoberfläche „sehen“ kann. Dieser Artikel erklärt, wie Forscher diese Radardaten sorgfältig bereinigt und analysiert haben und was sie fanden: schräg gekippte, vergrabene Schichten, die stark an küstennahe Ablagerungen erinnern und neue Hinweise auf ein verschwundenes marsianisches Meer liefern.
Die verborgene Zweiteilung des Mars
Der Mars ist in zwei sehr unterschiedliche Regionen geteilt. Die südliche Hälfte ist hoch, rau und von alten Kratern gezeichnet. Die nördliche Hälfte ist tiefer gelegen, glatter und umfasst ein weites Gebiet namens Utopia Planitia. Viele Formen entlang der Grenze zwischen diesen Regionen — Täler, Deltas und Seebecken — deuten darauf hin, dass einst Wasser talwärts in die nördlichen Niederungen floss und möglicherweise einen Ozean bildete, der etwa ein Drittel des Planeten bedeckte. In Utopia Planitia weisen heute seltsame Formen wie gekerbte Senken und polygonale Muster auf vergrabenes Eis hin, doch die detaillierte Geschichte dieses vermuteten Ozeans blieb schwer fassbar, weil die entscheidenden Hinweise unter der Oberfläche liegen.
Ein Rover, der den Boden „hört“
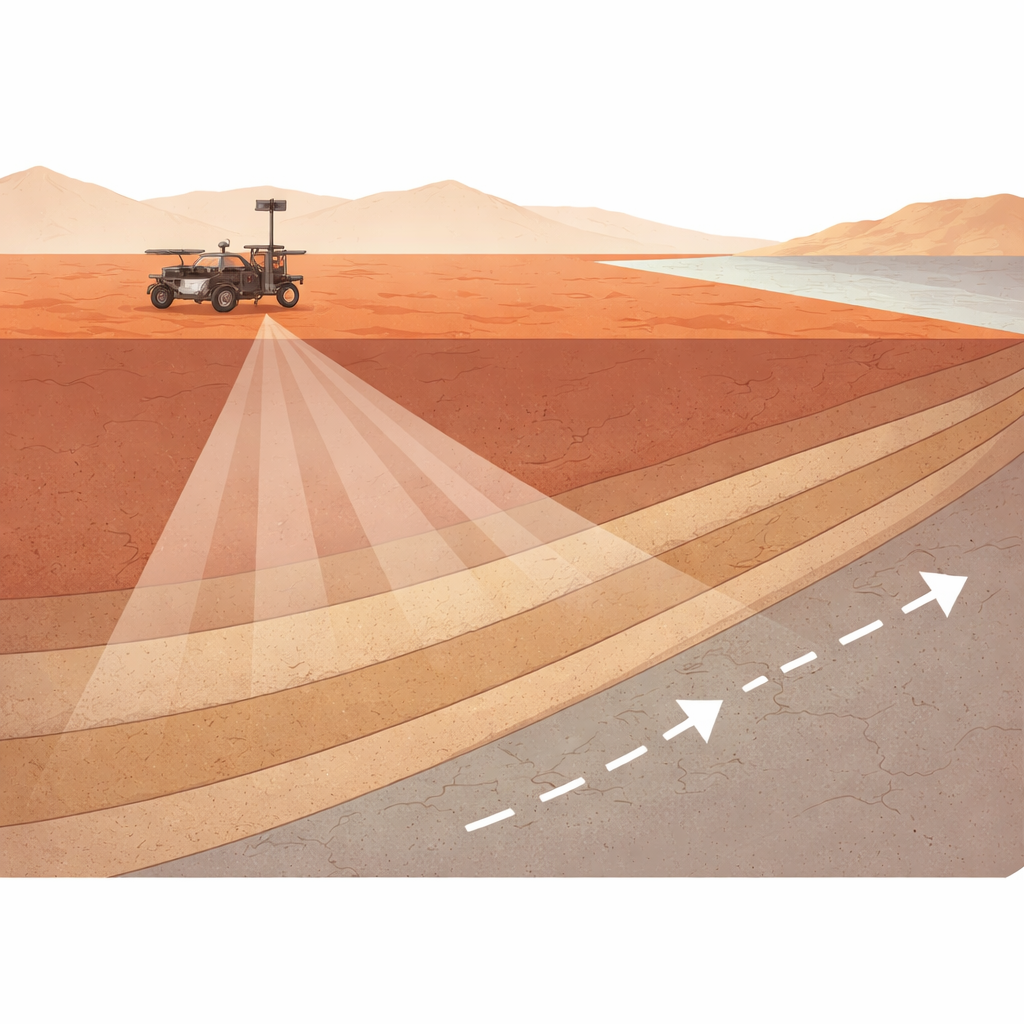
Der Zhurong-Rover landete im Mai 2021 im südlichen Utopia Planitia und begann eine Woche später mit seiner Fahrt über die Oberfläche. Auf seinem Fahrgestell ist ein zweikanaliges Radarsystem montiert, das Mars Rover Penetrating Radar oder RoPeR genannt wird. Ein Kanal nutzt höhere Frequenzen, um flache Strukturen fein aufzulösen; der andere, Gegenstand dieser Studie, arbeitet mit niedrigeren Frequenzen zwischen 15 und 95 Megahertz, um Tiefen von etwa 100 Metern zu erreichen. Während der Rover fast zwei Kilometer zurücklegte, sandte das tieffrequente Radar wiederholt Impulse in den Boden und zeichnete die Echos auf, wodurch ein kontinuierliches Profil der verborgenen Schichten unter seiner Fahrspur entstand.
Ein verrauschtes Untergrundbild säubern
Rohdaten eines sich bewegenden Rovers sind unordentlich. Echos stammen nicht nur von unterirdischen Schichten, sondern auch von der Roverstruktur selbst und der unmittelbar darunter liegenden Oberfläche, und die Zeitstempel des Radars können von Messung zu Messung leicht schwanken. Das Team lud zunächst alle öffentlich freigegebenen Daten herunter und fasste 109 einzelne Dateien zu einem konsistenten Datensatz zusammen. Sie entfernten interne „Selbsttest“-Impulse ohne geologische Information, korrigierten winzige Zeitverschiebungen mit einer Kreuzkorrelationsmethode zur Ausrichtung der Wellenformen und resampelten einen Teil der Daten, sodass die Abstände zwischen den Messpunkten entlang der Fahrspur gleichmäßig 25 Zentimeter betrugen. Anschließend wandten sie eine Reihe standardmäßiger Schritte an — Normalisierung der Energie, Entfernung konstanter Offset- und breitbandiger Hintergrundsignale, Herausfiltern unerwünschter Frequenzen, Beschneiden frühzeitiger Artefakte und Verstärkung tieferer Echos — um echte subsurface Reflexionen zu schärfen.
Entscheiden, wie tief das Signal reicht
Eine zentrale Frage ist, wie weit das Radar tatsächlich reale Strukturen erfasst und wo es nur noch Rauschen aufzeichnet. Die Forscher untersuchten, wie die durchschnittliche Signalstärke und ihre Variabilität mit der Zeit nach jedem Impuls abnahmen, was der Tiefe entspricht. Beide Messgrößen fielen kontinuierlich ab und flachten dann um eine bestimmte Verzögerungszeit herum ab — ein Hinweis auf den Punkt, an dem aussagekräftige Echos im Hintergrundrauschen aufgehen. Sie kamen zu dem Schluss, dass Signale, die innerhalb von etwa 1,5 Mikrosekunden nach jedem Impuls aufgezeichnet wurden, noch geologische Informationen enthielten, während spätere Signale größtenteils Rauschen waren. Dadurch konnten sie sich auf den Tiefenbereich konzentrieren, den das Instrument tatsächlich auflösen konnte.
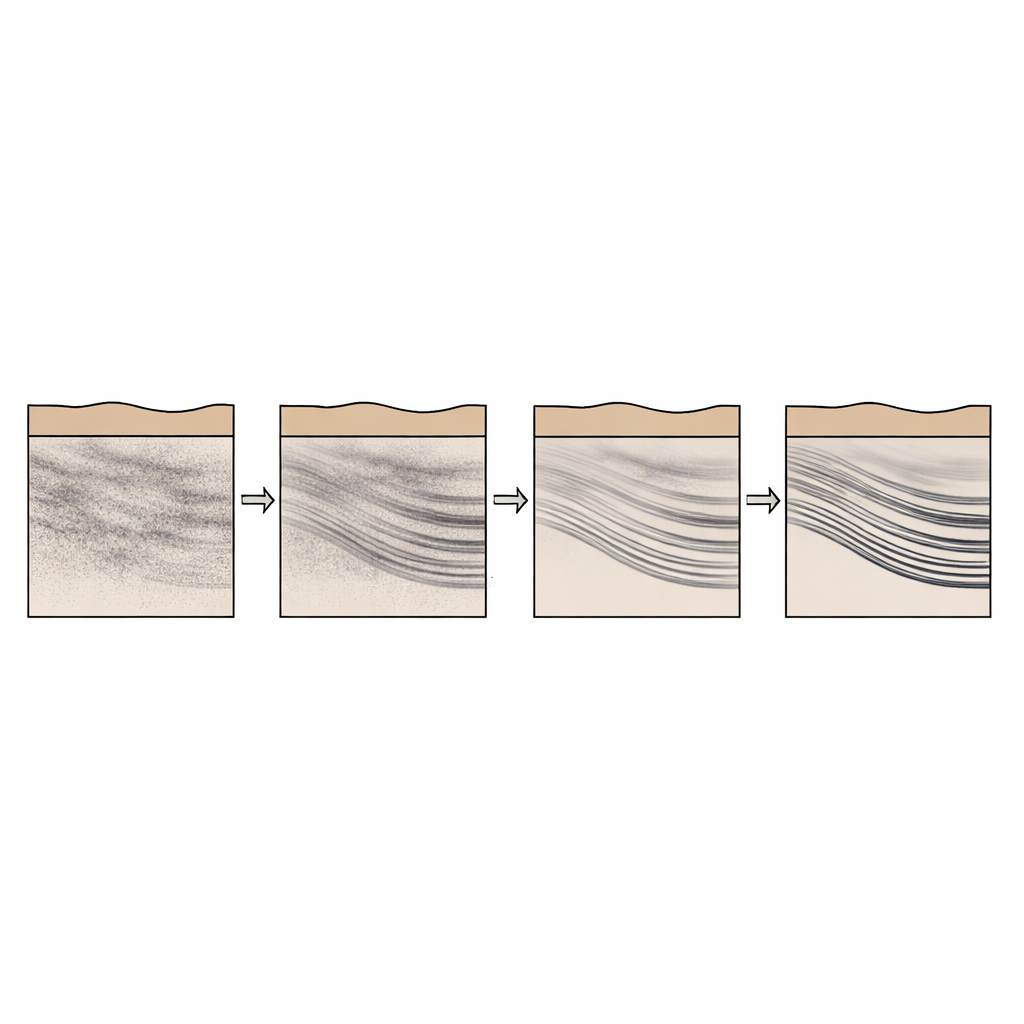
Aufdeckung vergrabener schräg verlaufender Schichten
Nach der Datenbereinigung nutzte das Team eine Technik namens Migration, um Reflexionen an ihre korrekten Untergrundpositionen zu verschieben und Signal-Laufzeiten in Tiefen umzurechnen, wobei sie vernünftige elektrische Eigenschaften des marsianischen Bodens annahmen. Anschließend korrigierten sie das Radarbild für subtile Änderungen der Oberflächenhöhe mit Höhendaten der Navigationskamera von Zhurong, sodass unterirdische Schichten entlang der gesamten Fahrspur fair verglichen werden konnten. Die finalen Radargramme zeigen eine Reihe markanter Reflektoren — helle, gebogene Bänder —, die in Richtung der nördlichen Niederungen geneigt sind und sich in einer Tiefe von etwa 10 bis 35 Metern unter der Oberfläche befinden. Die Forscher vermassen Lage, Tiefe und Neigungswinkel von 76 solchen Merkmalen und stellten fest, dass Winkel und Anordnung mit den schräg verlaufenden Foreset-Lagen übereinstimmen, wie sie typischerweise entstehen, wenn Sedimente sich entlang einer Küstenlinie auslagern.
Was das für das verlorene Meer des Mars bedeutet
Um ihre Arbeit allgemein nutzbar zu machen, veröffentlichten die Autoren nicht nur die rohen und verarbeiteten Radarprofile, sondern auch den Verarbeitungs-Code und die Messdaten aller 76 geneigten Reflektoren. Unabhängige Vergleiche mit früheren Studien zeigen, dass ihr Vorgehen die Klarheit flacher Strukturen verbessert, ohne offensichtliche Artefakte einzuführen. Für Nicht-Spezialisten ist die wichtigste Erkenntnis, dass Forscher durch sorgfältiges „Hören“ der schwachen Echos unter der Marsoberfläche nun offenbar alte Küstenablagerungen in Utopia Planitia kartieren. Diese vergrabenen Schichten stützen die Vorstellung, dass ein großer Wasserkörper einst die nördlichen Niederungen des Mars füllte — und dass seine Küstenlinie, obwohl sie für das Auge längst verschwunden ist, noch im Untergrund erhalten ist.
Zitation: Li, J., Chen, Z., Meng, X. et al. Low-Frequency Data Processing and Characteristics of Tianwen-1 Mars Rover Penetrating Radar. Sci Data 13, 674 (2026). https://doi.org/10.1038/s41597-026-07034-4
Schlüsselwörter: Mars-Ozean, Bodenradar, Utopia Planitia, Zhurong-Rover, Martianischer Untergrund