Clear Sky Science · nl
Laagfrequente gegevensverwerking en kenmerken van het penetrerende radar van de Tianwen-1 Marsrover
Waarom het belang van ondergrondse observaties op Mars
Wetenschappers vragen zich al decennia af of Mars ooit een noordelijk oceaan had. De sporen van die oude kustlijn, als die er was, liggen nu bedolven onder stof en gesteente. De Zhurong-rover van China, onderdeel van de Tianwen-1-missie, draagt een laagfrequente grondpenetrerende radar die tot ongeveer 100 meter onder het Marsoppervlak kan ‘‘kijken’’. Dit artikel legt uit hoe onderzoekers die radargegevens zorgvuldig hebben opgeschoond en geanalyseerd en wat ze vonden: hellende begraven lagen die sterk doen denken aan kustafzettingen, wat nieuwe aanwijzingen geeft voor een verdwenen Marziaanse zee.
De verborgen tweedeling van Mars
Mars is verdeeld in twee zeer verschillende werelden. Het zuidelijke halfrond is hoog, ruw en vol oude kraters. Het noordelijke halfrond is lager, vlakker en omvat een uitgestrekt gebied dat Utopia Planitia wordt genoemd. Veel landvormen langs de grens tussen deze regio’s—dalen, delta’s en meerbekkens—suggereren dat water ooit bergaf stroomde naar de noordelijke laagvlakten, mogelijk een oceaan vormend die ongeveer een derde van de planeet besloeg. In Utopia Planitia wijzen vreemde vormen zoals afgeronde depressies en veelhoekige patronen op begraven ijs, maar het gedetailleerde verhaal van deze veronderstelde oceaan bleef ongrijpbaar omdat de cruciale aanwijzingen ondergronds liggen.
Een rover die naar de grond luistert
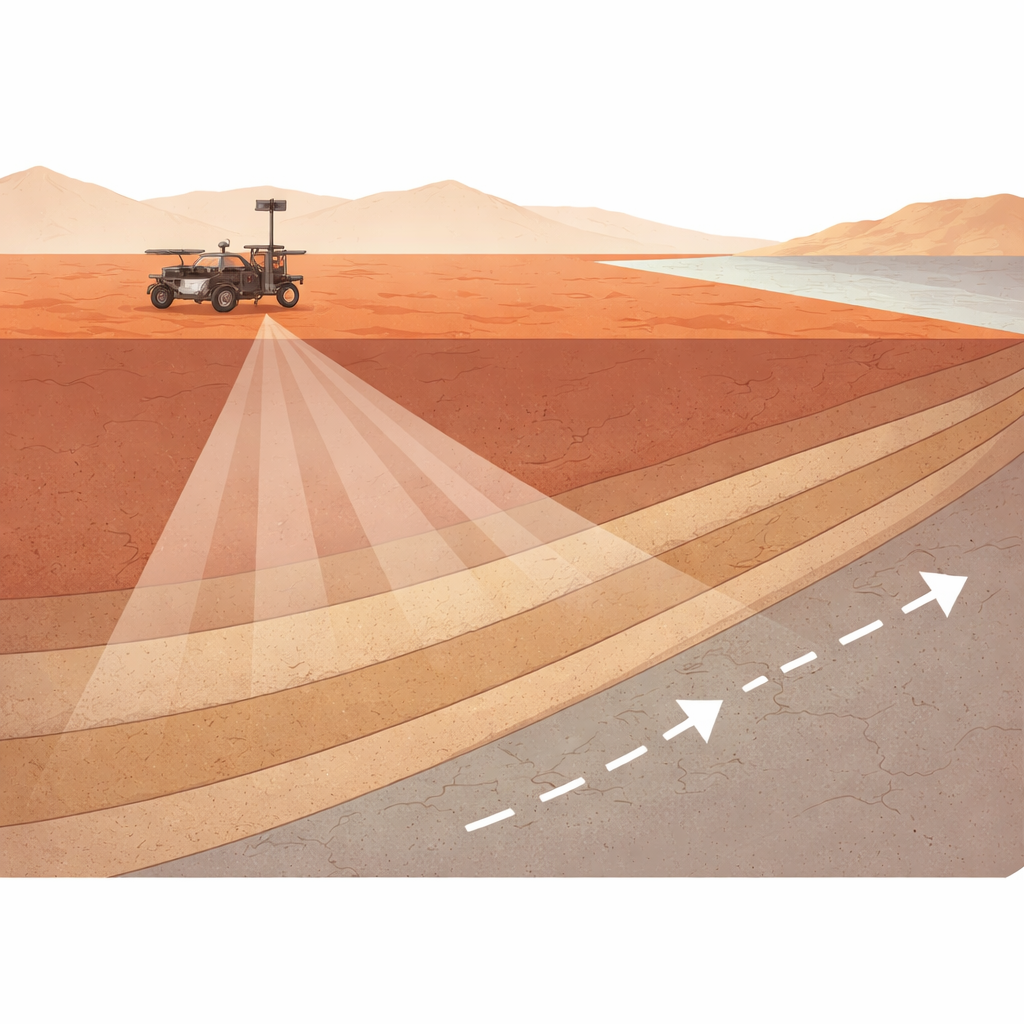
De Zhurong-rover landde in mei 2021 in het zuidelijke deel van Utopia Planitia en begon een week later over het oppervlak te rijden. Op zijn chassis is een tweekanaals radarsysteem gemonteerd, Mars Rover Penetrating Radar of RoPeR genoemd. Het ene kanaal gebruikt hogere frequenties om ondiepe structuren in detail in kaart te brengen; het andere, onderwerp van deze studie, gebruikt lagere frequenties tussen 15 en 95 megahertz om dieptes van ongeveer 100 meter te bereiken. Terwijl de rover bijna twee kilometer reed, zond de laagfrequente radar herhaalde pulsen de grond in en registreerde de echo’s, waarmee een continu profiel van verborgen lagen onder zijn route werd opgebouwd.
Een rumoerig ondergronds beeld opschonen
Ruwe radargegevens van een rijdende rover zijn rommelig. Echo’s kaatsen niet alleen terug van ondergrondse lagen maar ook van het eigen chassis van de rover en van het oppervlak direct onder de rover, en de timing van de radar kan van registratie tot registratie licht schommelen. Het team downloadde eerst alle openbaar vrijgegeven data en combineerde 109 afzonderlijke bestanden tot één consistent dataset. Ze verwijderden interne ‘‘zelftest’’-pulsen die geen geologische informatie bevatten, corrigeerden kleine tijdverschuivingen met een cross-correlatiemethode om de golfvormen uit te lijnen, en resampleden een deel van de gegevens zodat de afstand tussen metingen uniform 25 centimeter langs de route werd. Daarna pasten ze een reeks standaardstappen toe—normalisatie van energie, verwijdering van constante offsets en brede achtergrondsignalen, filteren van ongewenste frequenties, bijsnijden van vroegtijdige artefacten en versterken van diepere echo’s—om echte ondergrondse reflecties te verscherpen.
Beoordelen hoe diep het signaal reikt
Een cruciale vraag is hoe ver de radar daadwerkelijk echte structuren ziet in plaats van alleen ruis. De onderzoekers onderzochten hoe de gemiddelde signaalsterkte en de variabiliteit daarin veranderden met de tijd na elke puls, wat overeenkomt met diepte. Beide grootheden namen gestaag af en vlakten vervolgens af rond een bepaalde vertraging, wat het punt aangaf waar betekenisvolle echo’s overgingen in achtergrondruis. Ze concludeerden dat signalen die binnen ongeveer 1,5 microseconden na elke puls werden opgenomen nog geologische informatie bevatten, terwijl latere signalen grotendeels ruis waren. Dat stelde hen in staat zich te concentreren op het dieptebereik dat het instrument werkelijk kon onderscheiden.
Begraven hellende lagen onthullen
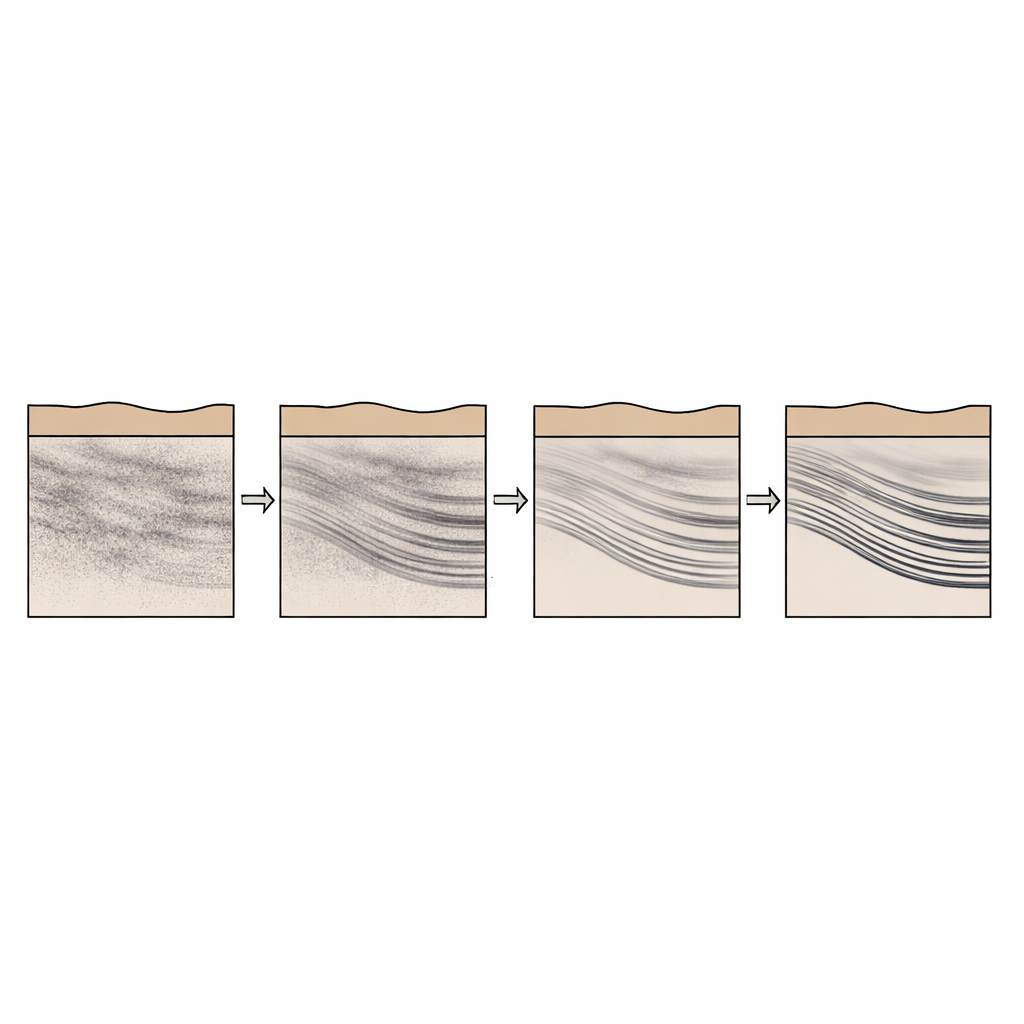
Na het opschonen van de gegevens gebruikte het team een techniek genaamd migratie om reflecties op hun juiste ondergrondse locaties te repositioneren en signaalreistijden om te rekenen naar diepte, uitgaande van redelijke elektrische eigenschappen van de Marsbodem. Vervolgens corrigeerden ze de radarbeelden voor subtiele wijzigingen in het oppervlaktehoogte met behulp van hoogtegegevens van Zhurongs navigatiecamera, zodat ondergrondse lagen eerlijk langs het hele traject konden worden vergeleken. De uiteindelijke radargrammen tonen een reeks distincte reflectoren—heldere, gebogen banden—die naar de noordelijke laagvlakte hellen op ongeveer 10 tot 35 meter diepte. De onderzoekers maten de positie, diepte en hellingshoek van 76 dergelijke kenmerken en vonden dat hun hoeken en rangschikking overeenkomen met het type schuine voorzetbedden dat typisch ontstaat waar sedimenten zich langs een kustlijn naar buiten opbouwen.
Wat dit betekent voor Mars’ verdwenen zee
Om hun werk breed bruikbaar te maken, publiceerden de auteurs niet alleen de ruwe en verwerkte radarprofielen, maar ook de verwerkingscode en de meetgegevens van alle 76 hellende reflectoren. Onafhankelijke vergelijkingen met eerdere studies tonen aan dat hun aanpak de scherpte van ondiepe structuren verbetert zonder duidelijke artefacten te introduceren. Voor niet‑specialisten is de belangrijkste conclusie dat door zorgvuldig te luisteren naar zwakke echo’s onder het Marsoppervlak, wetenschappers nu in kaart brengen wat lijkt op oude kustafzettingen in Utopia Planitia. Deze begraven hellende lagen versterken het idee dat er ooit een groot waterlichaam de noordelijke laagvlakten van Mars vulde—en dat de kustlijn, hoewel voor het oog verdwenen, nog altijd in de ondergrond is vastgelegd.
Bronvermelding: Li, J., Chen, Z., Meng, X. et al. Low-Frequency Data Processing and Characteristics of Tianwen-1 Mars Rover Penetrating Radar. Sci Data 13, 674 (2026). https://doi.org/10.1038/s41597-026-07034-4
Trefwoorden: Mars-oceaan, grondpenetrerende radar, Utopia Planitia, Zhurong-rover, Marsbodem