Clear Sky Science · es
Procesamiento de datos de baja frecuencia y características del radar de penetración del rover Tianwen-1 en Marte
Por qué importa mirar bajo la superficie de Marte
Durante décadas, los científicos se han preguntado si Marte tuvo en su día un océano en el norte. Las huellas de aquella antigua línea de costa, si existió, ahora están enterradas bajo polvo y roca. El rover Zhurong de China, parte de la misión Tianwen-1, lleva un radar de penetración de baja frecuencia que puede “ver” hasta unos 100 metros bajo la superficie marciana. Este artículo explica cómo los investigadores limpiaron y analizaron cuidadosamente esos datos de radar y qué encontraron: capas enterradas inclinadas que se parecen mucho a depósitos costeros, lo que ofrece nuevas pistas sobre un mar marciano desaparecido.
La división oculta de Marte
Marte está dividido en dos mundos muy distintos. La mitad sur es alta, accidentada y llena de cráteres antiguos. La mitad norte es más baja, más suave e incluye una vasta región llamada Utopia Planitia. Muchas formas del terreno a lo largo del límite entre estas regiones —valles, deltas y cuencas lacustres— sugieren que el agua una vez fluyó cuesta abajo hacia las tierras bajas del norte, posiblemente formando un océano que cubrió alrededor de un tercio del planeta. En la Utopia Planitia actual, formas extrañas como depresiones con bordes en forma de concha y patrones poligonales apuntan a hielo enterrado, pero la historia detallada de ese supuesto océano ha seguido siendo elusiva porque las pistas cruciales yacen bajo tierra.
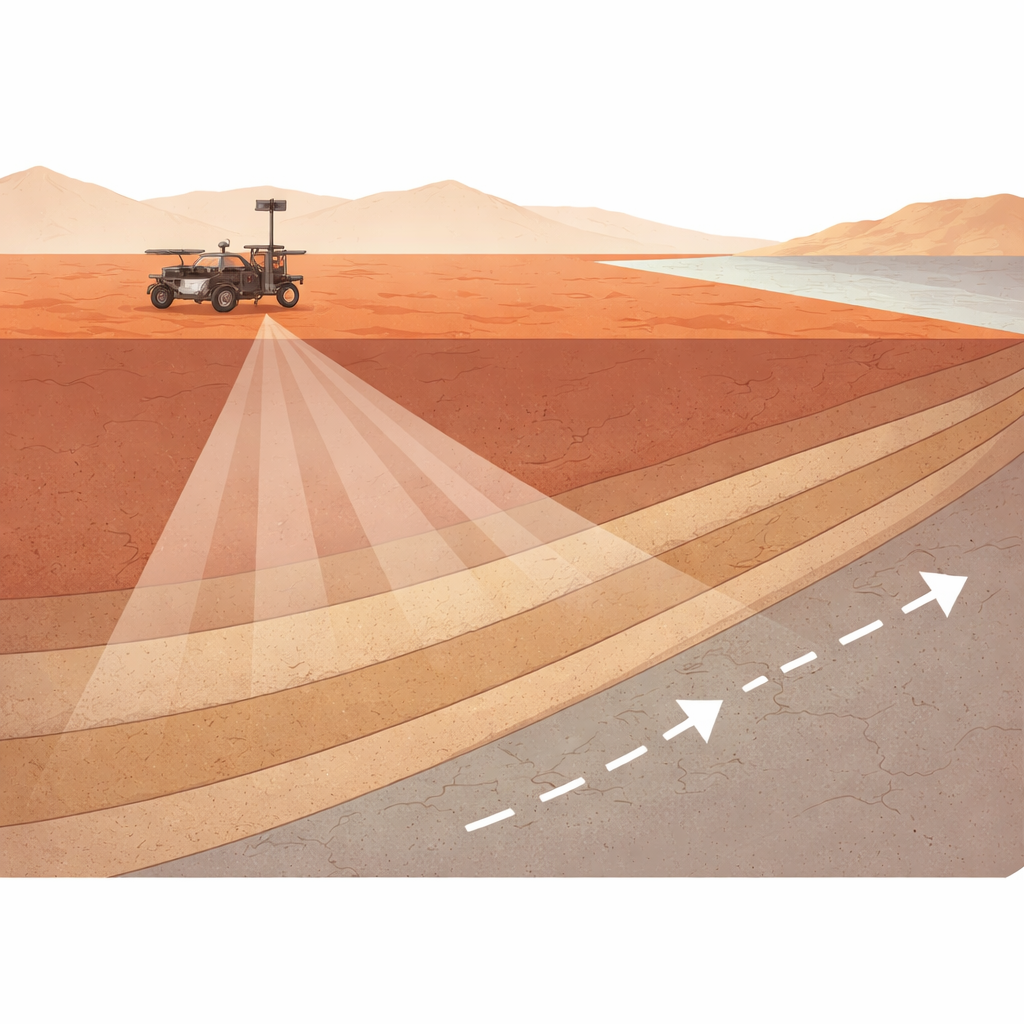
Un rover que escucha el suelo
El rover Zhurong aterrizó en el sur de Utopia Planitia en mayo de 2021 y comenzó a desplazarse por la superficie una semana después. Montado en su chasis tiene un sistema de radar de dos canales llamado Radar de Penetración del Rover Marciano, o RoPeR. Un canal usa frecuencias más altas para cartografiar rasgos superficiales en detalle fino; el otro, foco de este estudio, utiliza frecuencias bajas entre 15 y 95 megahercios para alcanzar profundidades de aproximadamente 100 metros. A medida que el rover condujo casi dos kilómetros, el radar de baja frecuencia envió pulsos repetidos al suelo y registró los ecos, construyendo un perfil continuo de las capas ocultas bajo su trayectoria.
Limpiar una imagen subterránea ruidosa
Los datos de radar crudos de un rover en movimiento son desordenados. Los ecos rebotan no solo en las capas subterráneas sino también en el propio cuerpo del rover y en la superficie directamente bajo él, y la sincronización del radar puede desviarse ligeramente de trazo a trazo. El equipo primero descargó todos los datos publicados y combinó 109 archivos separados en un único conjunto de datos coherente. Eliminaron pulsos internos de “autoprueba” que no contenían información geológica, corrigieron pequeños desplazamientos temporales mediante un método de correlación cruzada para alinear las formas de onda y remuestrearon parte de los datos para que el espaciado entre mediciones fuera uniformemente de 25 centímetros a lo largo de la ruta del rover. Luego aplicaron una serie de pasos estándar —normalización de energía, eliminación de desplazamientos constantes y señales de fondo amplias, filtrado de frecuencias no deseadas, recorte de artefactos de tiempo temprano y refuerzo de ecos más profundos— para afinar las reflexiones subterráneas reales.
Decidir hasta qué profundidad llega la señal
Una cuestión crítica es hasta qué profundidad el radar realmente está viendo estructuras reales en lugar de solo ruido. Los investigadores examinaron cómo cambiaban la intensidad media de la señal y su variabilidad con el tiempo tras cada pulso, lo que corresponde a profundidad. Ambas medidas disminuyeron de forma constante y luego se estabilizaron alrededor de cierto retardo, indicando el punto donde los ecos significativos se mezclan con el ruido de fondo. Concluyeron que las señales registradas dentro de aproximadamente 1,5 microsegundos tras cada pulso aún contenían información geológica, mientras que las señales posteriores eran en su mayoría ruido. Esto les permitió centrarse en el rango de profundidad que el instrumento podía resolver realmente.
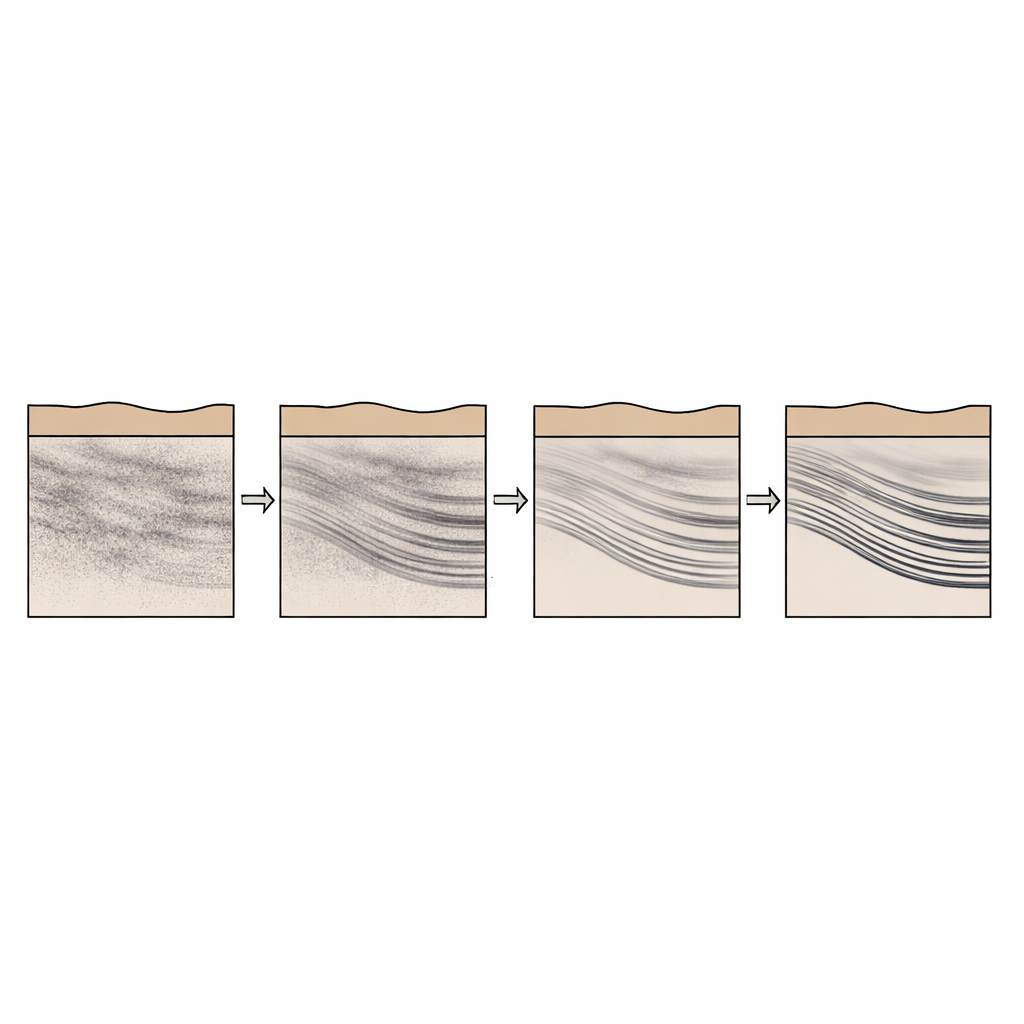
Revelando capas inclinadas enterradas
Tras limpiar los datos, el equipo aplicó una técnica llamada migración para reposicionar las reflexiones en sus ubicaciones subterráneas correctas y convertir los tiempos de viaje de la señal en profundidad, asumiendo propiedades eléctricas razonables para el suelo marciano. Luego corrigieron la imagen radar por cambios sutiles en la altura de la superficie utilizando datos de elevación de la cámara de navegación de Zhurong, de modo que las capas subterráneas pudieran compararse de forma homogénea a lo largo de toda la trayectoria. Las radargramas finales muestran una serie de reflectores distintos —bandas brillantes y curvadas— inclinándose hacia las tierras bajas del norte entre unos 10 y 35 metros por debajo de la superficie. Los investigadores midieron la posición, profundidad y ángulo de inclinación de 76 de estas características y hallaron que sus ángulos y disposición coinciden con el tipo de estratos de pendiente (foreset beds) típicamente formados donde los sedimentos se depositan hacia afuera a lo largo de una línea de costa.
Qué significa esto para el mar perdido de Marte
Para que su trabajo resulte de utilidad general, los autores publicaron no solo los perfiles de radar crudos y procesados, sino también el código de procesamiento y las mediciones de los 76 reflectores inclinados. Comparaciones independientes con estudios anteriores muestran que su enfoque mejora la claridad de las estructuras someras sin introducir artefactos evidentes. Para los no especialistas, la conclusión principal es que, al escuchar cuidadosamente los ecos débiles bajo la superficie de Marte, los científicos están ahora cartografiando lo que parece ser depósitos costeros antiguos en Utopia Planitia. Estas capas inclinadas enterradas refuerzan la idea de que un gran cuerpo de agua una vez llenó las tierras bajas del norte de Marte —y que su línea de costa, aunque desaparecida a simple vista, todavía está escrita bajo tierra.
Cita: Li, J., Chen, Z., Meng, X. et al. Low-Frequency Data Processing and Characteristics of Tianwen-1 Mars Rover Penetrating Radar. Sci Data 13, 674 (2026). https://doi.org/10.1038/s41597-026-07034-4
Palabras clave: océano marciano, radar de penetración terrestre, Utopia Planitia, rovers Zhurong, subsuelo marciano