Clear Sky Science · pl
Przetwarzanie danych niskoczęstotliwościowych i charakterystyka penetrującego radaru łazika Tianwen-1
Dlaczego warto zaglądać pod powierzchnię Marsa
Przez dekady naukowcy zastanawiali się, czy Mars nie miał kiedyś północnego oceanu. Ślady tej starożytnej linii brzegowej, jeśli istniała, są dziś zakopane pod pyłem i skałą. Chiński łazik Zhurong, część misji Tianwen-1, niesie niskoczęstotliwościowy radar penetrujący grunt, który potrafi „zajrzeć” na około 100 metrów pod powierzchnię Marsa. Artykuł wyjaśnia, jak badacze starannie oczyszczali i analizowali te dane radarowe oraz co odkryli: pochylone, zakryte warstwy przypominające osady przybrzeżne, dostarczające nowych wskazówek o zaginionym morskim zbiorniku na Marsie.
Ukryty podział Marsa
Mars podzielony jest na dwa bardzo różne obszary. Południowa połowa jest wyższa, surowa i naznaczona starożytnymi kraterami. Północna połowa jest niższa, gładsza i obejmuje rozległy region zwany Utopia Planitia. Wiele form terenu wzdłuż granicy między tymi regionami — doliny, delty i niecki jeziorne — sugeruje, że woda kiedyś spływała w dół do północnych niziny, prawdopodobnie tworząc ocean obejmujący około jednej trzeciej planety. W dzisiejszej Utopia Planitia dziwne kształty, takie jak skąpe zagłębienia i wzory poligonowe, wskazują na zakopany lód, ale szczegółowa historia tego przypuszczalnego oceanu pozostawała niejasna, ponieważ kluczowe wskazówki znajdują się pod powierzchnią.
Łazik, który słucha gruntu
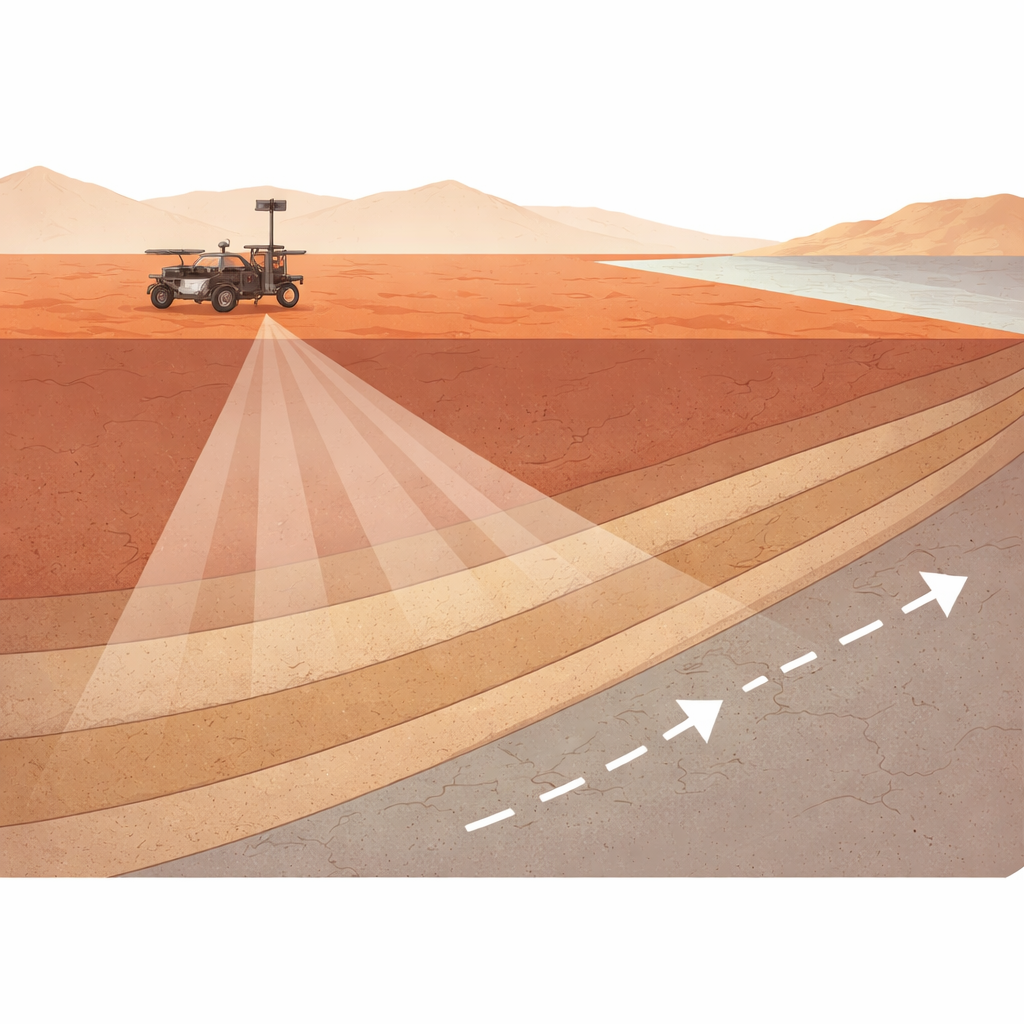
Łazik Zhurong wylądował w południowej Utopia Planitia w maju 2021 roku i tydzień później rozpoczął przejazdy po powierzchni. Na jego podwoziu zamontowano dwukanałowy system radarowy zwany Mars Rover Penetrating Radar, w skrócie RoPeR. Jeden kanał używa wyższych częstotliwości do mapowania płytkich struktur z dużą szczegółowością; drugi, będący przedmiotem tego badania, pracuje na niższych częstotliwościach od 15 do 95 megaherców, aby dotrzeć na głębokość około 100 metrów. W miarę jak łazik przejechał niemal dwa kilometry, radar niskoczęstotliwościowy wysyłał powtarzające się impulsy w głąb gruntu i rejestrował echa, tworząc ciągły profil ukrytych warstw pod trasą przejazdu.
Oczyszczanie zaszumionego obrazu podpowierzchni
Surowe dane radarowe z poruszającego się łazika są chaotyczne. Echa odbijają się nie tylko od warstw podpowierzchniowych, lecz także od samego kadłuba łazika i powierzchni bezpośrednio pod nim, a czasem występują drobne przesunięcia czasowe między zapisami. Zespół najpierw pobrał wszystkie publicznie udostępnione dane i połączył 109 oddzielnych plików w jeden, spójny zbiór danych. Usunęli wewnętrzne impulsy „self-test”, które nie niosły informacji geologicznej, skorygowali drobne przesunięcia czasowe przy pomocy metody korelacji krzyżowej w celu wyrównania przebiegów oraz przekształcili część danych tak, by odstęp między pomiarami był równomierny i wynosił 25 centymetrów wzdłuż trasy łazika. Następnie zastosowali szereg standardowych kroków — normalizację energii, usuwanie stałych odchyleń i szerokiego tła, filtrowanie niepożądanych częstotliwości, przycinanie artefaktów pojawiających się we wczesnym czasie oraz wzmocnienie głębszych echo — aby wyostrzyć prawdziwe odbicia podpowierzchniowe.
Decydowanie, jak głęboko sięga sygnał
Kluczowe pytanie brzmiało, jak daleko w głąb radar rzeczywiście wykrywa realne struktury, a nie tylko szum. Badacze zbadali, jak średnia siła sygnału i jej zmienność zmieniały się w czasie po każdym impulsie, co odpowiada głębokościom. Obie miary stopniowo malały, a następnie wyrównywały się wokół pewnego opóźnienia, wskazując punkt, w którym znaczące echa zlewają się z tłem szumowym. Stwierdzili, że sygnały rejestrowane w ciągu około 1,5 mikrosekundy po każdym impulsie nadal niosły informacje geologiczne, podczas gdy późniejsze sygnały były przeważnie szumem. Dzięki temu mogli skupić się na zakresie głębokości, który instrument rzeczywiście rozróżniał.
Ujawnianie zakopanych pochylonych warstw
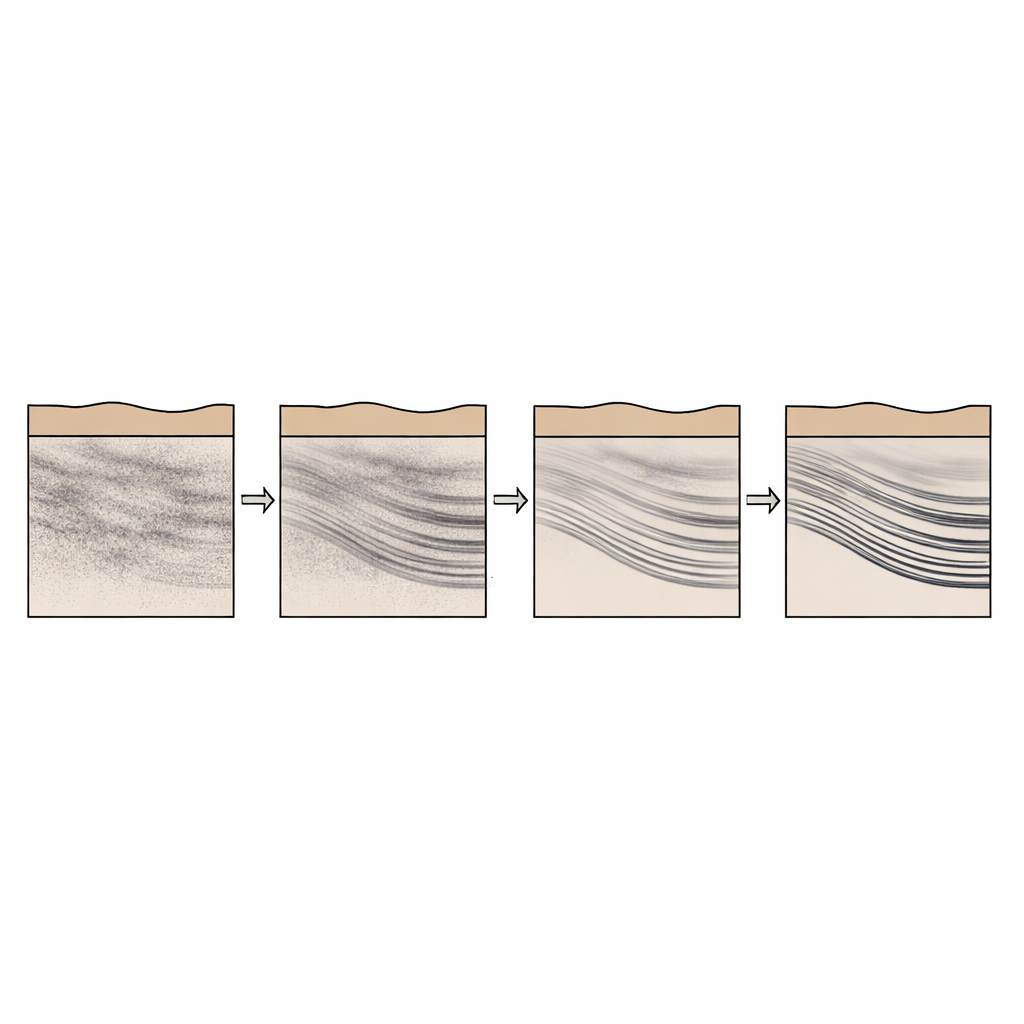
Po oczyszczeniu danych zespół zastosował technikę zwaną migracją, aby przesunąć odbicia na ich prawidłowe pozycje podpowierzchniowe i przeliczyć czasy podróży sygnału na głębokość, przyjmując rozsądne właściwości elektryczne marsjańskiej gleby. Następnie skorygowali obraz radarowy o subtelne zmiany wysokości powierzchni, korzystając z danych wysokościowych z kamery nawigacyjnej Zhuronga, tak aby warstwy pod powierzchnią można było porównywać wzdłuż całej trasy. Ostateczne radarogramy wykazują serię wyraźnych reflektorów — jasnych, zakrzywionych pasm — nachylonych w kierunku północnych niziny na głębokościach od około 10 do 35 metrów pod powierzchnią. Badacze zmierzyli położenie, głębokość i kąt nachylenia 76 takich elementów i stwierdzili, że ich kąty i układ odpowiadają rodzajowi nachylonych warstw przybrzeżnych (foreset), typowo tworzonych, gdy osady budują się na zewnątrz wzdłuż linii brzegowej.
Co to oznacza dla zaginionego morza Marsa
Aby ich praca była użyteczna szerzej, autorzy udostępnili nie tylko surowe i przetworzone profile radarowe, lecz także kod przetwarzający i pomiary wszystkich 76 nachylonych reflektorów. Niezależne porównania z wcześniejszymi badaniami pokazują, że ich podejście poprawia czytelność płytkich struktur bez wprowadzania oczywistych artefaktów. Dla osób spoza specjalności główne przesłanie jest takie: uważnie słuchając słabych echo spod powierzchni Marsa, naukowcy mapują to, co wydaje się być starożytnymi osadami przybrzeżnymi w Utopia Planitia. Te zakopane, pochylone warstwy wzmacniają hipotezę, że duży zbiornik wodny kiedyś wypełniał północne niziny Marsa — i że jego linia brzegowa, choć zniknęła z widoku, wciąż jest zapisana pod ziemią.
Cytowanie: Li, J., Chen, Z., Meng, X. et al. Low-Frequency Data Processing and Characteristics of Tianwen-1 Mars Rover Penetrating Radar. Sci Data 13, 674 (2026). https://doi.org/10.1038/s41597-026-07034-4
Słowa kluczowe: ocean Marsa, radar penetrujący grunt, Utopia Planitia, łazik Zhurong, podpowierzchnia Marsa