Clear Sky Science · ja
天問一号火星ローバー貫通レーダーの低周波データ処理と特徴
なぜ火星の地下を探ることが重要なのか
何十年もの間、科学者たちは火星にかつて北半球の海が存在したかどうかを疑問視してきました。その古い海岸線の痕跡は、もし存在したならば、今や塵や岩の下に埋もれています。中国の天問一号ミッションに属する祝融号ローバーは、地表下およそ100メートル程度を“覗く”ことができる低周波の地中レーダーを搭載しています。本論文は研究者たちがそのレーダーデータを注意深く洗浄・解析した方法と発見を説明します。すなわち、沿岸堆積物と非常によく似た傾斜した埋没層が見つかり、失われた火星の海について新たな手がかりを提供しています。
火星の隠れた二分法
火星は二つのまったく異なる世界に分かれています。南半球は高地でごつごつしており、古いクレーターに打たれた傷が多く見られます。北半球は低地で滑らかで、ユートピア平原と呼ばれる広大な領域を含みます。これらの領域の境界沿いに見られる多くの地形――谷、三角州、湖盆――は、水が下方へ流れて北の低地に注ぎ込み、惑星の約3分の1を覆う海を形成した可能性を示唆します。現在のユートピア平原では、ホタテ状の陥没や多角形模様といった奇妙な形が埋没氷をほのめかしますが、この想定される海の詳細な物語は、重要な手がかりが地下にあるために依然として明らかになっていませんでした。
地面の声を聞くローバー
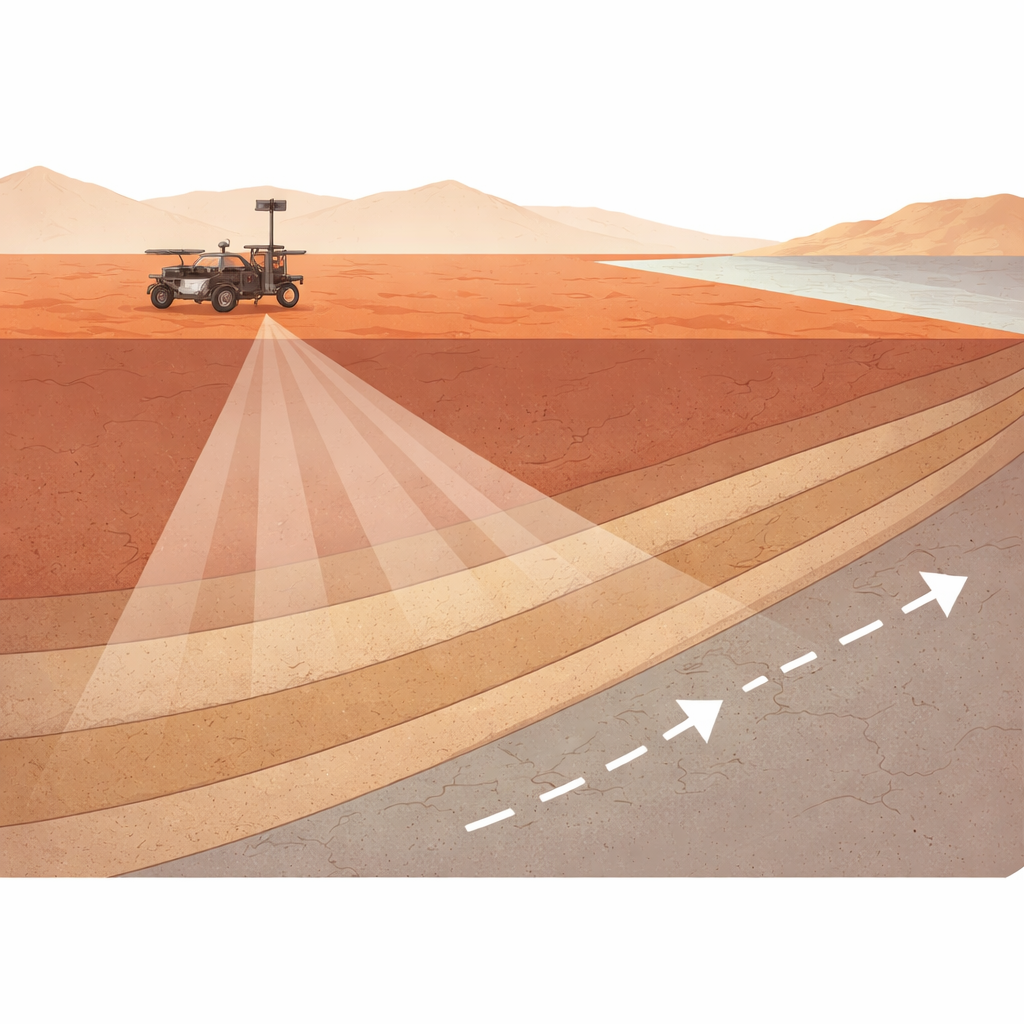
祝融号ローバーは2021年5月にユートピア平原の南部に着陸し、その1週間後に走行を開始しました。車体にはMars Rover Penetrating Radar(RoPeR)と呼ばれる2チャンネルのレーダーシステムが搭載されています。一方のチャンネルは高周波を使って浅い特徴を詳細に写し、もう一方(本研究の焦点)は15〜95メガヘルツの低周波を用いて約100メートルの深さまで到達します。ローバーがほぼ2キロメートルを走行する間、低周波レーダーは地中へ繰り返しパルスを送り、そのエコーを記録して走行経路下の連続的なプロファイルを作成しました。
ノイジーな地下像のクリーンアップ
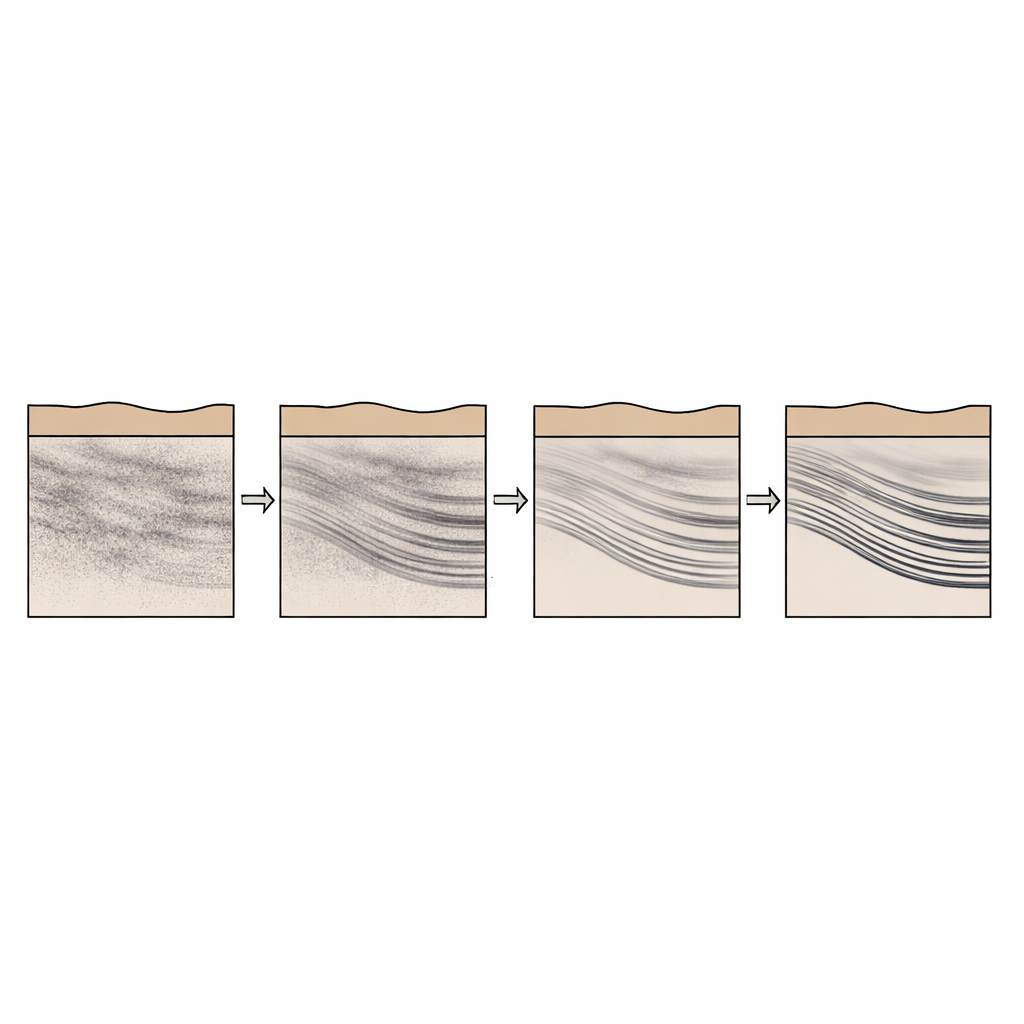
移動するローバーから得られる生データは散らかっています。エコーは地下層だけでなくローバー自身の車体や直下の地表からも跳ね返り、レーダーのタイミングはトレースごとにわずかに揺らぐことがあります。チームはまず公開されているすべてのデータをダウンロードし、109個の個別ファイルを単一の一貫したデータセットに統合しました。地質情報を含まない内部の“セルフテスト”パルスを除去し、波形を整列させるために相互相関法で微小な時間ずれを補正し、走行方向に沿った測定間隔が均一になるように一部データを再サンプリングして25センチメートル間隔に揃えました。つづいて一連の標準的処理を施しました――エネルギー正規化、定数オフセットと広帯域な背景信号の除去、不必要な周波数のフィルタリング、初期の時間帯アーティファクトのトリミング、そして深部のエコーの増強――これにより真の地下反射が鮮明になりました。
信号がどれほど深く届くかの判断
重要な問いの一つは、レーダーが実際に構造を捉えている深さがどこまでかという点です。研究者たちは、各パルス後の時間(これは深さに対応します)における平均信号強度とその変動がどのように変化するかを調べました。両者は徐々に減衰してある遅延時間付近で平坦化し、有意なエコーが背景雑音に溶け込む点を示しました。彼らは、各パルス後およそ1.5マイクロ秒以内に記録された信号には地質情報が含まれており、それ以降の信号の多くは主にノイズであると結論付けました。これにより、機器が実際に分解能を持つ深さ範囲に焦点を絞ることができました。
埋没した傾斜層の顕在化
データを洗浄した後、チームは移行(マイグレーション)という手法を使って反射を正しい地下位置へ再配置し、信号の往復時間を火星土壌の合理的な電気特性を想定して深さに変換しました。次に祝融号のナビゲーションカメラによる地表高データを用いてレーダー像を地形変化で補正し、地下層が走行全体で公平に比較できるようにしました。最終的なレーダーグラムは、一連の明瞭な反射面――明るい曲線状の帯――が表面下約10〜35メートルの範囲で北側の低地に向かって傾斜している様子を示しています。研究者たちは76件のこうした反射面の位置、深さ、傾斜角を測定し、その角度と配置は沿岸で堆積物が外側へ向かって堆積する際に形成される典型的な傾斜砕層(フォーセットベッド)に一致することを見出しました。
火星の失われた海にとっての意味
研究者らは自身の成果を広く有用にするために、生のレーダープロファイルと処理済みデータだけでなく、処理コードと76件の傾斜反射面すべての測定値も公開しました。独立した先行研究との比較は、彼らのアプローチが浅層構造の鮮明さを向上させつつ明らかな人工物を導入していないことを示しています。専門外の人への主要な結論は、火星表面下の微かなエコーに注意深く耳を傾けることで、研究者たちがユートピア平原における古代の沿岸堆積物と見なせる地層を写し出しているということです。これらの埋没した傾斜層は、かつて火星の北部低地に大規模な水域が満ちていたという考えを支持する重要な裏付けを与えます――目には長く見えなくなった海岸線も、地下にはまだ記されているのです。
引用: Li, J., Chen, Z., Meng, X. et al. Low-Frequency Data Processing and Characteristics of Tianwen-1 Mars Rover Penetrating Radar. Sci Data 13, 674 (2026). https://doi.org/10.1038/s41597-026-07034-4
キーワード: 火星の海, 地中レーダー, ユートピア平原, 祝融号ローバー, 火星の地下構造