Clear Sky Science · en
Low-Frequency Data Processing and Characteristics of Tianwen-1 Mars Rover Penetrating Radar
Why Looking Under Mars Matters
For decades, scientists have wondered whether Mars once had a northern ocean. The traces of that ancient shoreline, if it existed, are now buried under dust and rock. China’s Zhurong rover, part of the Tianwen-1 mission, carries a low-frequency ground-penetrating radar that can “see” about 100 meters beneath the Martian surface. This paper explains how researchers carefully cleaned and analyzed that radar data and what they found: tilted buried layers that look very much like coastal deposits, offering new clues about a vanished Martian sea.
The Hidden Divide of Mars
Mars is split into two very different worlds. The southern half is high, rough, and battered by ancient craters. The northern half is lower, smoother, and includes a vast region called Utopia Planitia. Many landforms along the boundary between these regions—valleys, deltas, and lake basins—suggest that water once flowed downhill into the northern lowlands, possibly forming an ocean that covered about a third of the planet. In Utopia Planitia today, strange shapes such as scalloped depressions and polygon patterns hint at buried ice, but the detailed story of this suspected ocean has remained elusive because the crucial clues lie underground.
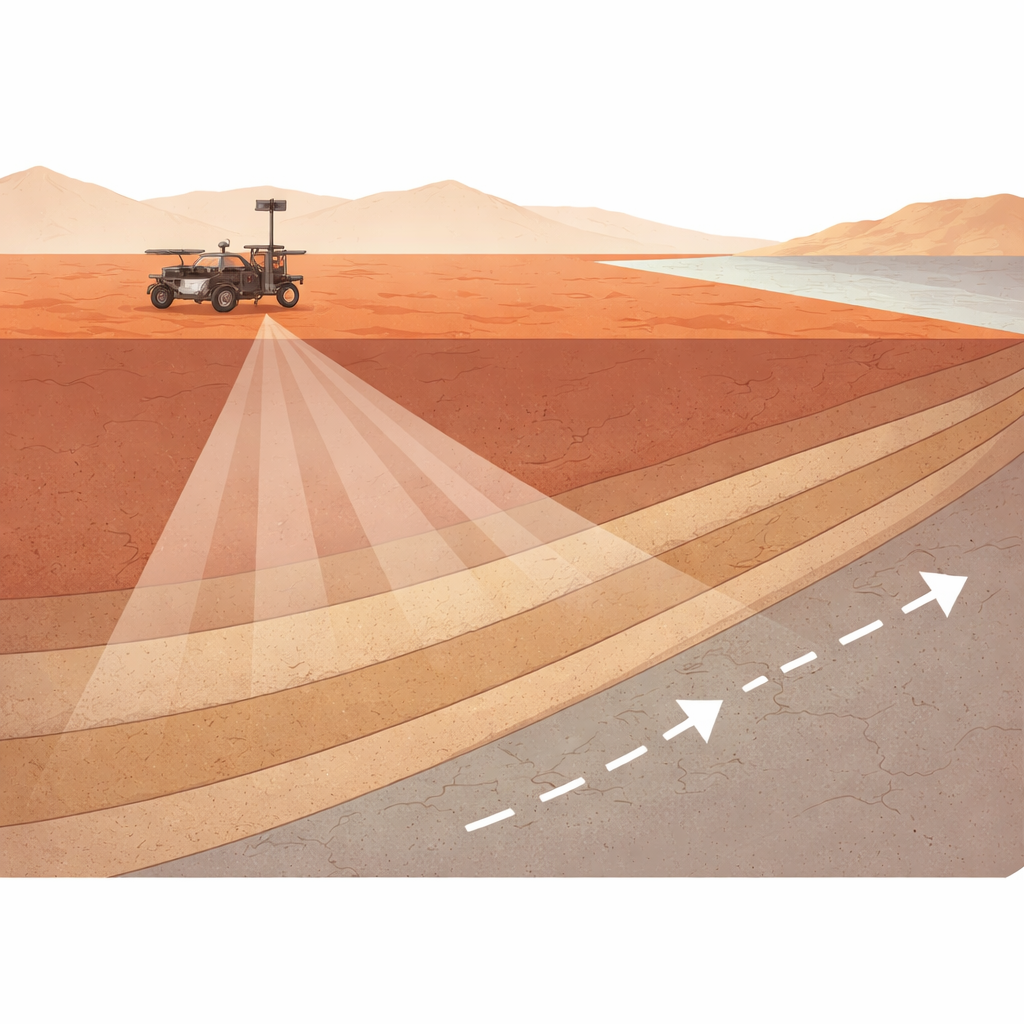
A Rover That Listens to the Ground
The Zhurong rover touched down in southern Utopia Planitia in May 2021 and began rolling across the surface a week later. Mounted on its chassis is a two-channel radar system called the Mars Rover Penetrating Radar, or RoPeR. One channel uses higher frequencies to map shallow features in fine detail; the other, the focus of this study, uses lower frequencies between 15 and 95 megahertz to reach depths of roughly 100 meters. As the rover drove nearly two kilometers, the low-frequency radar sent repeated pulses into the ground and recorded the echoes, building up a continuous profile of hidden layers beneath its path.
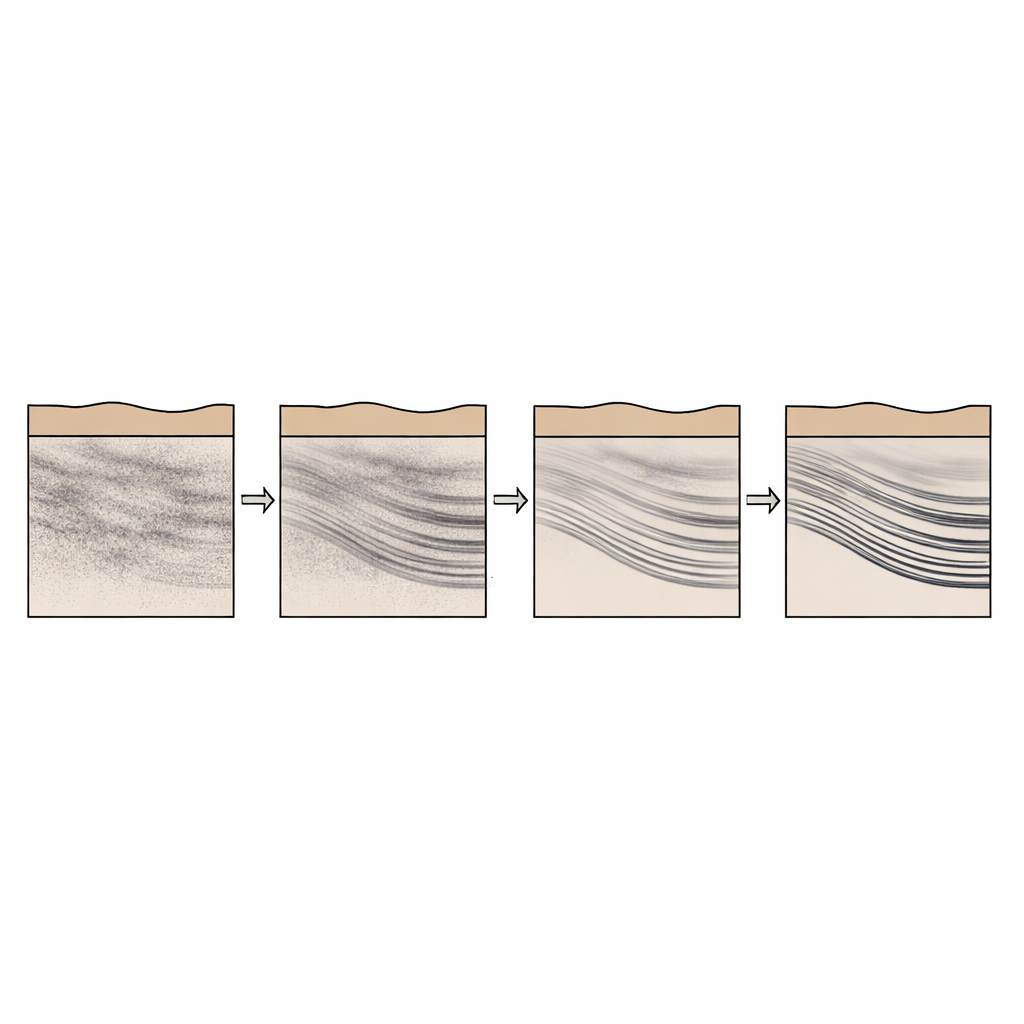
Cleaning Up a Noisy Underground Picture
Raw radar data from a moving rover are messy. Echoes bounce not only from underground layers but also from the rover’s own body and the surface directly beneath it, and the radar’s timing can jitter slightly from trace to trace. The team first downloaded all publicly released data and combined 109 separate files into a single, consistent dataset. They removed internal “self-test” pulses that carried no geological information, corrected tiny timing shifts using a cross-correlation method to align the waveforms, and resampled part of the data so that the spacing between measurements was uniformly 25 centimeters along the rover’s path. Then they applied a series of standard steps—normalizing energy, removing constant offsets and broad background signals, filtering out unwanted frequencies, trimming early-time artifacts, and boosting deeper echoes—to sharpen true subsurface reflections.
Deciding How Deep the Signal Goes
One critical question is how far down the radar is actually seeing real structures rather than just noise. The researchers examined how the average signal strength and its variability changed with time after each pulse, which corresponds to depth. Both measures steadily dropped off and then flattened around a certain delay, indicating the point where meaningful echoes blended into background noise. They concluded that signals recorded within about 1.5 microseconds after each pulse still carried geological information, while later signals were mostly noise. This allowed them to focus on the depth range the instrument could truly resolve.
Revealing Buried Sloping Layers
After cleaning the data, the team used a technique called migration to reposition reflections at their correct subsurface locations and convert signal travel times into depth, assuming reasonable electrical properties for the Martian soil. They then corrected the radar image for subtle changes in surface height using elevation data from Zhurong’s navigation camera, so that underground layers could be compared fairly along the entire track. The final radargrams show a series of distinct reflectors—bright, curved bands—dipping toward the northern lowlands between about 10 and 35 meters below the surface. The researchers measured the position, depth, and dip angle of 76 such features and found that their angles and arrangement match the kind of sloping foreset beds typically formed where sediments build outward along a shoreline.
What This Means for Mars’s Lost Sea
To make their work broadly useful, the authors released not only the raw and processed radar profiles but also the processing code and measurements of all 76 dipping reflectors. Independent comparisons with earlier studies show that their approach improves the clarity of shallow structures without introducing obvious artifacts. For non-specialists, the main takeaway is that by carefully listening to faint echoes beneath Mars’s surface, scientists are now mapping what appears to be ancient coastal deposits in Utopia Planitia. These buried sloping layers add weight to the idea that a large body of water once filled Mars’s northern lowlands—and that its shoreline, though long gone to the eye, is still written underground.
Citation: Li, J., Chen, Z., Meng, X. et al. Low-Frequency Data Processing and Characteristics of Tianwen-1 Mars Rover Penetrating Radar. Sci Data 13, 674 (2026). https://doi.org/10.1038/s41597-026-07034-4
Keywords: Mars ocean, ground penetrating radar, Utopia Planitia, Zhurong rover, Martian subsurface