Clear Sky Science · ru
Обработка низкочастотных данных и характеристики зондирующего радара марсохода Tianwen-1
Почему важно заглядывать под поверхность Марса
Долгие годы ученые гадали, существовал ли когда-то на Марсе северный океан. Следы этой древней береговой линии, если она была, теперь скрыты под пылью и породой. Китайский марсоход Чжужун, входящий в состав миссии Tianwen-1, несет низкочастотный зондирующий радар, который может «видеть» примерно на 100 метров под марсианской поверхностью. В этой статье объясняется, как исследователи аккуратно очистили и проанализировали эти радарные данные и что они обнаружили: наклонные погребенные слои, очень похожие на прибрежные отложения, что дает новые подсказки о некогда существовавшем морe на Марсе.
Скрытый разлом Марса
Марс разделен на два очень разных мира. Южная половина — возвышенная, неровная и изрезанная древними кратерами. Северная половина ниже, более гладкая и включает обширный регион, называемый Равниной Утопия. Многие формы рельефа вдоль границы между этими районами — долины, дельты и озерные бассейны — указывают на то, что вода когда-то текла вниз в северные низменности, возможно образовав океан, покрывавший около трети планеты. На Равнине Утопия сегодня странные формы, такие как выемки с волнообразными краями и полигоны, намекают на погребенный лед, но подробная история предполагаемого океана оставалась неясной, потому что ключевые свидетельства скрыты под землей.
Марсоход, который «слушает» землю
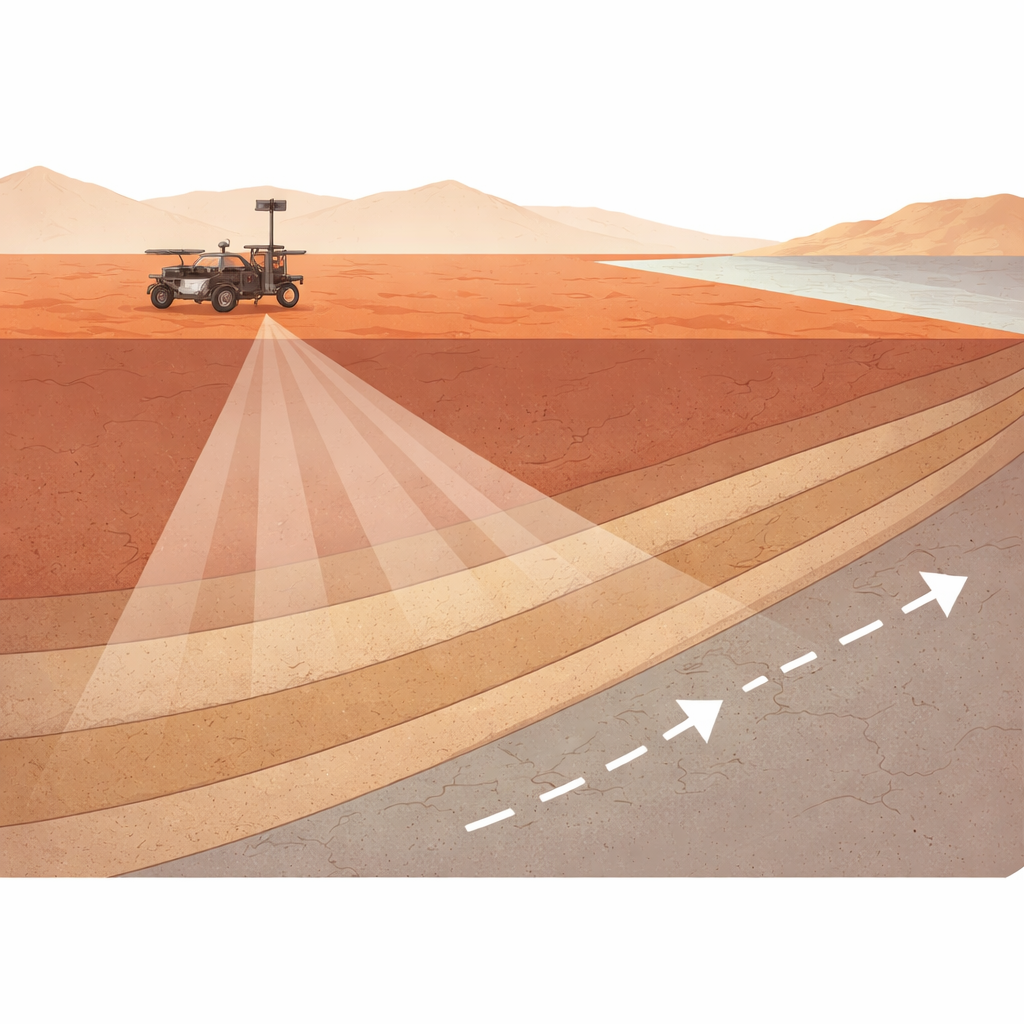
Марсоход Чжужун приземлился в южной части Равнины Утопия в мае 2021 года и начал движение по поверхности через неделю. На его шасси установлен двухканальный радиолокатор под названием Mars Rover Penetrating Radar, или RoPeR. Один канал использует более высокие частоты для детальной съемки мелких структур; другой, в центре этого исследования, работает на низких частотах от 15 до 95 мегагерц и достигает глубин примерно до 100 метров. Когда марсоход проехал почти два километра, низкочастотный радар посылал повторяющиеся импульсы в грунт и записывал эхо, создавая непрерывный профиль скрытых слоев под пройденным маршрутом.
Устранение шума в подземной картине
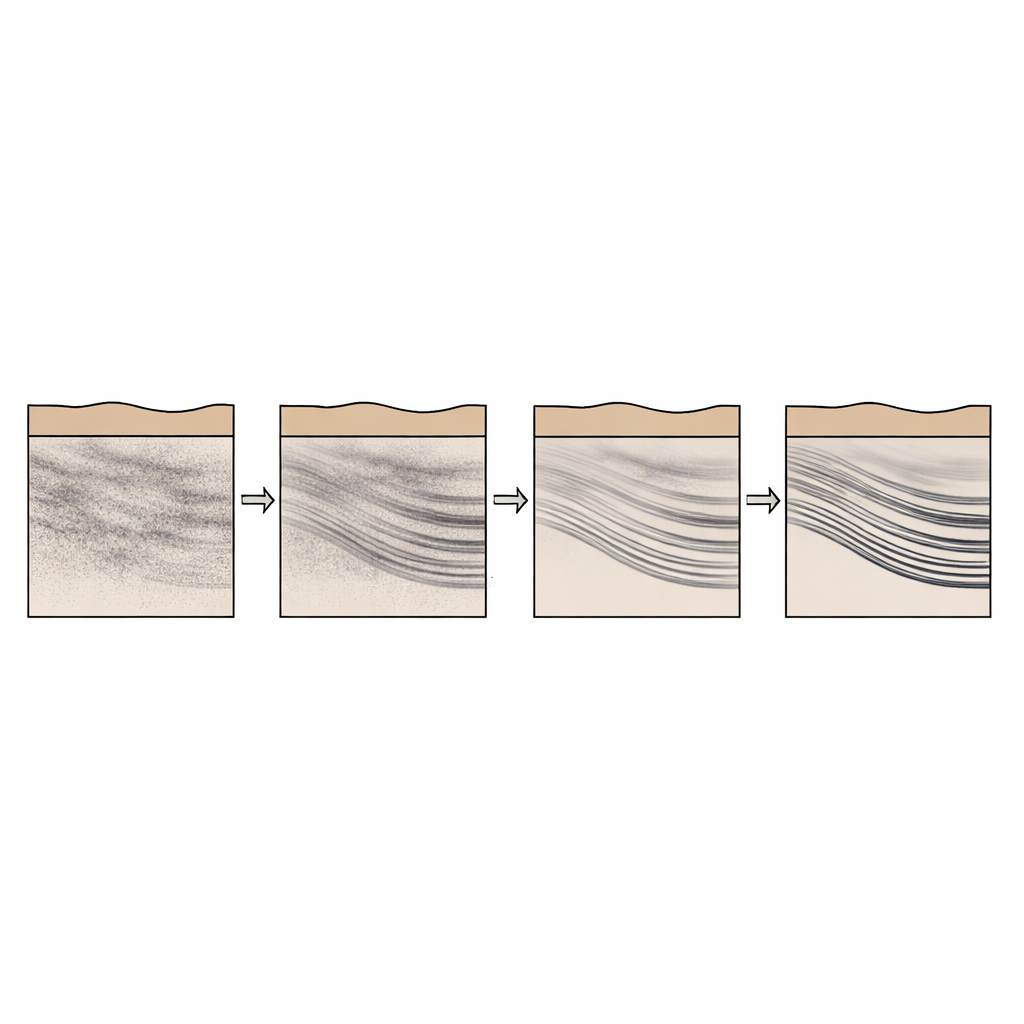
Исходные радарные данные, полученные с движущегося марсохода, беспорядочны. Эхо отражается не только от подземных слоев, но и от самого корпуса марсохода и поверхности непосредственно под ним, а временные метки радара могут слегка скакать по следам. Команда сначала загрузила все публично доступные данные и объединила 109 отдельных файлов в единый согласованный набор. Они удалили внутренние «самотестирующие» импульсы, не содержащие геологической информации, скорректировали крошечные сдвиги по времени с помощью метода кросс-корреляции для выравнивания форм волн и перересамплировали часть данных так, чтобы расстояние между измерениями было равномерным — 25 сантиметров вдоль пути марсохода. Затем применили ряд стандартных шагов — нормализацию энергии, удаление постоянных смещений и широкого фона, фильтрацию нежелательных частот, обрезку артефактов ранних времен и усиление более глубоких эхо — чтобы уточнить истинные подпочвенные отражения.
Определение глубины реального сигнала
Критический вопрос заключался в том, насколько глубоко радар действительно видит реальные структуры, а не просто шум. Исследователи изучали, как средняя сила сигнала и его изменчивость менялись со временем после каждого импульса, что соответствует глубине. Обе характеристики постепенно падали, затем выравнивались около определенной задержки, указывая на точку, где значимые эхо сливаются с фоновым шумом. Они пришли к выводу, что сигналы, зарегистрированные примерно в течение 1,5 микросекунд после каждого импульса, все еще несут геологическую информацию, тогда как более поздние сигналы в основном являются шумом. Это позволило им сосредоточиться на диапазоне глубин, который инструмент действительно мог разрешать.
Обнаружение погребенных наклонных слоев
После очистки данных команда использовала технику, называемую миграцией, чтобы переместить отражения в их правильные подпочвенные положения и преобразовать времена прохождения сигнала в глубину, предполагая разумные электрические свойства марсианского грунта. Затем они скорректировали радарное изображение для тонких изменений высоты поверхности, используя данные о высоте с навигационной камеры Чжужуна, чтобы подпочвенные слои можно было сопоставлять справедливо вдоль всего пути. Финальные радарограммы показывают серию отчетливых отражателей — яркие, изогнутые полосы — наклоненных в сторону северных низменностей на глубинах примерно от 10 до 35 метров под поверхностью. Исследователи измерили положение, глубину и угол наклона 76 таких объектов и обнаружили, что их углы и расположение соответствуют типичным наклонным телам, образующимся там, где отложения накапливаются и распространяются вдоль береговой линии.
Что это значит для утраченного моря Марса
Чтобы сделать свою работу максимально полезной, авторы опубликовали не только исходные и обработанные радарные профили, но и код обработки и измерения всех 76 наклонных отражателей. Независимые сравнения с предыдущими исследованиями показывают, что их подход улучшает четкость мелких структур без очевидного введения артефактов. Для неспециалистов главный вывод таков: внимательно «прослушивая» слабые эхо под поверхностью Марса, ученые сейчас картографируют то, что похоже на древние прибрежные отложения в Равнине Утопия. Эти погребенные наклонные слои усиливают идею о том, что обширный водный бассейн когда-то заполнял северные низменности Марса — и что его береговая линия, хотя и исчезла из видимого поля, все еще записана под землей.
Цитирование: Li, J., Chen, Z., Meng, X. et al. Low-Frequency Data Processing and Characteristics of Tianwen-1 Mars Rover Penetrating Radar. Sci Data 13, 674 (2026). https://doi.org/10.1038/s41597-026-07034-4
Ключевые слова: океан Марса, радиолокация прошедшей поверхности, Равнина Утопия, марсоход Чжужун, подповерхность Марса