Clear Sky Science · ru
Кинематическое и аэродинамическое моделирование гибких крыльев с регулировкой корня крыла для микролетательных аппаратов с машущими крыльями
Почему важны крошечные машущие роботы
Представьте себе робот‑летягу размером с ладонь, который может зависать, как колибри, пробираться сквозь завалы после землетрясения или осматривать внутренности механизма, куда не доберётся крупный дрон. Чтобы такие вдохновлённые насекомыми микролетательные аппараты стали практичными, инженерам нужно понять, как их тонкие, как бумага, крылья изгибаются, скручиваются и взаимодействуют с воздухом. В этой работе решается ключевая недостающая задача: как предсказать силы и крутящие моменты, возникающие при активном закручивании корней гибких крыльев для управления безхвостым зависающим роботом.

Как насекомоподобные роботы рулят без хвоста
Многие маленькие машущие роботы копируют насекомых, используя две крыла и без хвоста. Управлять ими оказывается неожиданно сложно. Просто увеличив частоту или амплитуду взмаха, можно изменить направление, но это связывает подъёмную силу с поворотом, делая управление неуклюжим. Исследуемая здесь конструкция использует более элегантный подход: сами корни крыльев могут вращаться. Одновременное закручивание корней в одном направлении вызывает тангаж вперёд или назад; закручивание вбок — крен; противоположные закрутки — рыскание. Всё это зависит от того, как деформируется гибкая поверхность крыла в ответ на закручивание, меняя угол встречи разных участков крыла с набегающим воздухом.
Разложение движения крыла на простые составляющие
Авторы сначала создают подробное математическое описание движения крыльев. Вместо того чтобы рассматривать крыло как жёсткую пластину, они признают, что лонжерон и основные жилки крыла не взмахивают абсолютно синхронно. Между ними существует небольшая фазовая задержка, называемая фазовым углом релаксации, которая отражает отставание мембраны от приводной структуры. Команда представляет движение взмаха как сочетание прямолинейного (треугольного) замаха и плавной синусоидальной кривой, что вместе имитирует реальные траектории, записанные высокоскоростными камерами. Затем они связывают фазовые различия между лонжероном и жилками с величиной скрутки у корня крыла для команд тангажа и крена, так что модель может предсказывать трёхмерную форму и время деформации гибкого крыла на каждом этапе взмаха.
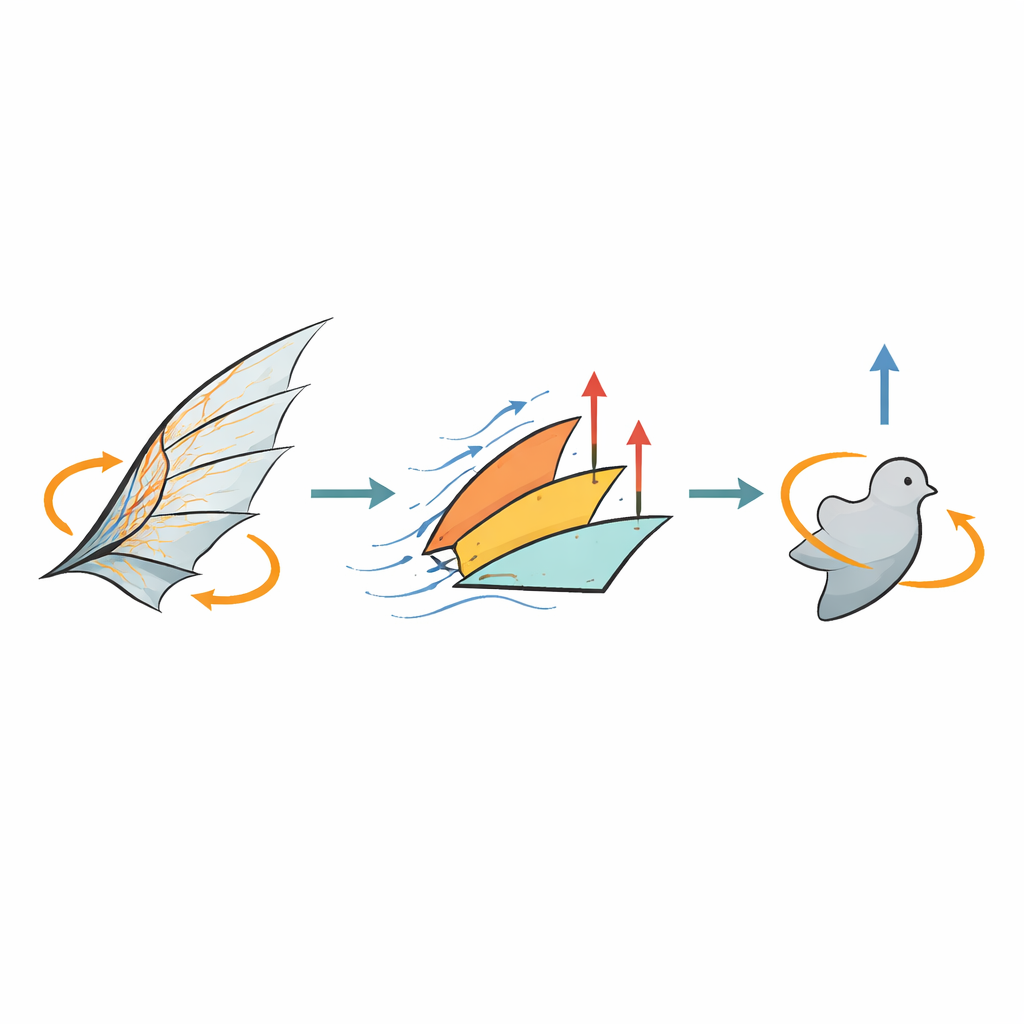
Разделение изгибающихся крыльев на управляемые участки потока
Моделирование воздуха вокруг полностью гибкого крыла в деталях обычно требует ресурсоёмкого расчёта течения жидкости, что слишком медленно для проектных исследований или бортового управления. Чтобы избежать этого, авторы предлагают хитрый упрощённый подход. Они разбивают деформирующуюся поверхность крыла на небольшое число жёстких плоских панелей, ориентированных по естественной сети жилок: три основных панеля, которые наклоняются и смещаются во время взмаха. Для каждой панели используется стандартный метод «лезвийного элемента», вычисляющий подъёмную силу и сопротивление для множества маленьких полос по размаху, с учётом как замаха, так и вращения крыла. Суммирование вкладов всех панелей даёт оценку полной силы и крутящего момента, действующих на робот, при гораздо меньших вычислительных затратах, чем в полном моделировании взаимодействия жидкости и структуры.
От уравнений к силам и моментам в лаборатории
Чтобы проверить свою модель, исследователи собрали прототип машущего робота с приводимыми тросами крыльями и настраиваемыми корнями. С помощью высокоскоростных камер и шестишурупного датчика силы они измеряли реальные формы крыльев, амплитуды взмаха, подъёмную силу и управляющие моменты при разных частотах и закрутках у корня. Те же условия подали в две модели: традиционное приближение одной плоскости и новую многопанельную методику. Простая модель склонялась к переоценке подъёмной силы — потому что использовала один фиксированный угол атаки для всего крыла — тогда как многопанельный метод с панельными углами атаки гораздо точнее согласовывался с экспериментом. В практическом диапазоне частот взмаха предсказания подъёмной силы оставались примерно в пределах 20 процентов от измеренных значений, а модель верно показывала, что команды тангажа и крена немного снижают подъём, при этом создавая управляющие моменты, растущие почти линейно с силой команды.
Что это означает для будущих крошечных летунов
Для неспециалистов главный вывод таков: авторы предложили быстрый и достаточно точный способ предсказать, как гибкие крылья реагируют на закручивание у корня при управлении крошечным летающим роботом. Объединив реалистичное, но компактное описание движения крыла с моделью потока по панелям, они показывают, что проектировщики могут оценивать подъём, сопротивление и управляющие моменты без дорогих симуляций или бесконечных попыток и ошибок. Это даёт инженерам практический инструментарий для настройки геометрии крыла, частоты взмаха и стратегий управления, чтобы насекомоподобные микролетательные аппараты могли устойчиво зависать и точно реагировать на команды, приближая манёвренных роботов размером с жуков к повседневному использованию.
Цитирование: Liu, Z., Zhang, X., Wang, Z. et al. Kinematic and aerodynamic modeling of flexible wings with wing root adjustment for flapping wing micro aerial vehicles. Sci Rep 16, 9827 (2026). https://doi.org/10.1038/s41598-026-40582-8
Ключевые слова: микро летательный аппарат с машущими крыльями, гибкие крылья, управление у корня крыла, аэродинамическое моделирование, роботехника, вдохновлённая биологией