Clear Sky Science · pl
Kinematyczne i aerodynamiczne modelowanie giętkich skrzydeł z regulacją nasady skrzydła dla mikrolotów o skrzydłach machających
Dlaczego małe roboty machające mają znaczenie
Wyobraź sobie robot latający wielkości dłoni, który potrafi zawisać jak koliber, przemieszczać się przez rumowisko po trzęsieniu ziemi lub skontrolować wnętrze maszyny tam, gdzie większe drony nie mogą dotrzeć. Aby tego typu mikroloty inspirowane owadami stały się praktyczne, inżynierowie muszą rozumieć, jak ich papierowo cienkie skrzydła się wyginają, skręcają i oddziałują z powietrzem. Artykuł zajmuje się kluczowym brakującym elementem: jak przewidywać siły i momenty przechyłu generowane, gdy nasady giętkich skrzydeł są aktywnie skręcane, by sterować bezogonowym, zawisającym robotem.

Jak roboty podobne do owadów skręcają bez ogonów
Wiele małych robotów machających wzoruje się na owadach, używając dwóch skrzydeł bez ogona. Sterowanie nimi jest zaskakująco trudne. Zwiększenie częstotliwości lub siły machania może zmienić kierunek, ale łączy to siłę unoszącą z momentem skrętu, co utrudnia kontrolę. Projekt omawiany tutaj stosuje bardziej eleganckie podejście: same nasady skrzydeł mogą się skręcać. Skręcając obie nasady w tym samym kierunku robot przechyla się do przodu lub do tyłu; skręcanie ich razem bocznie powoduje toczenie; skręcanie w przeciwnych kierunkach wywołuje odchylenie (yaw). Wszystko to zależy od tego, jak giętka powierzchnia skrzydła odkształca się w odpowiedzi na skręt, zmieniając kąt, pod jakim różne części skrzydła napotykają nadlatujące powietrze.
Rozbicie ruchu skrzydła na proste elementy
Autorzy najpierw tworzą szczegółowy opis matematyczny ruchu skrzydeł. Zamiast traktować skrzydło jako płytę sztywną, uwzględniają, że spar skrzydła i jego główne żyłki nie machają w idealnym zgraniu. Istnieje niewielkie opóźnienie fazowe, nazwane kątem fazy relaksacji, które opisuje, jak membrana pozostaje w tyle za elementem napędowym. Zespół reprezentuje ruch machania jako kombinację prostoliniowego (trójkątnego) przemiatania i gładkiej sinusoidalnej krzywej, które razem naśladują rzeczywiste trajektorie rejestrowane kamerami wysokiej prędkości. Następnie wiążą różnice fazowe między spar i żyłkami z tym, jak bardzo nasada skrzydła jest skręcana, zarówno dla poleceń pitch jak i roll, aby model mógł przewidzieć trójwymiarowy kształt i czasowanie giętkiego skrzydła podczas każdego etapu uderzenia skrzydłem.
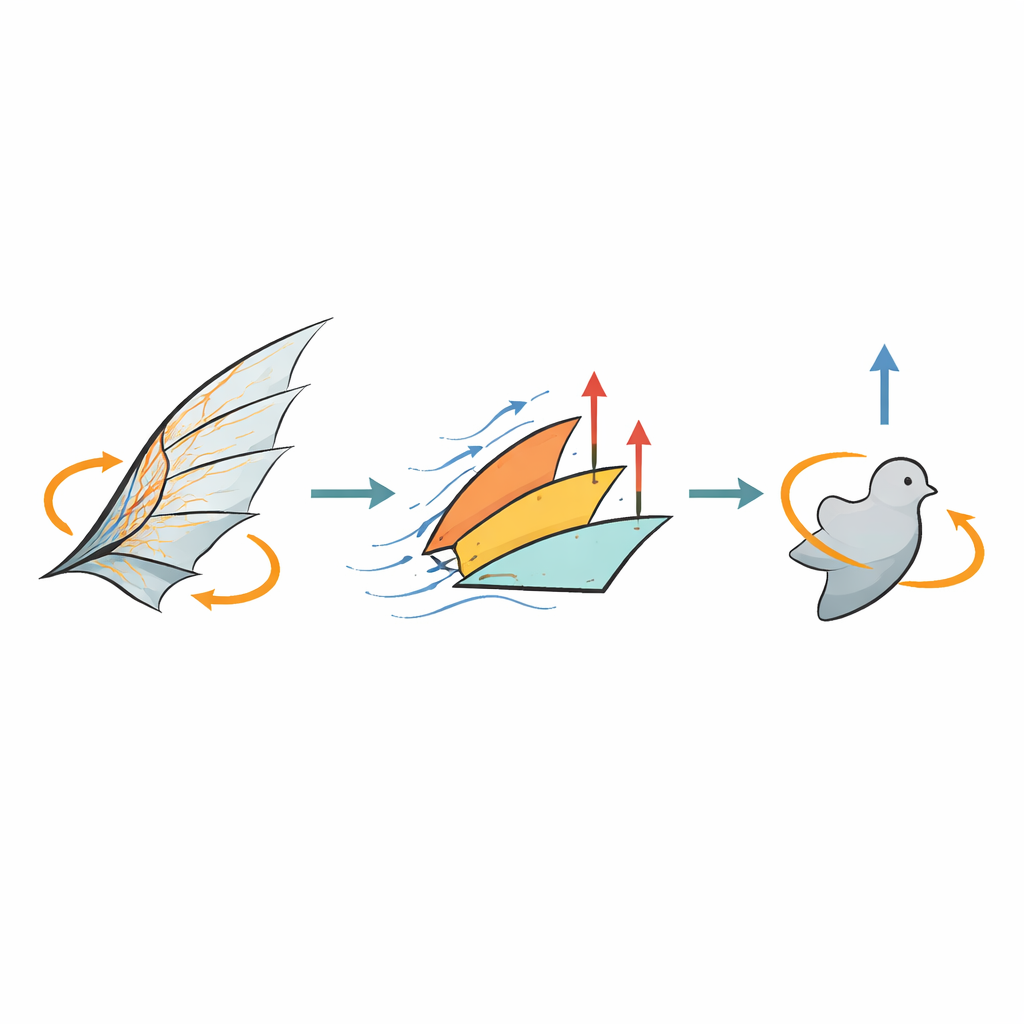
Przekształcenie giętkich skrzydeł w zarządzalne elementy przepływu powietrza
Modelowanie powietrza wokół w pełni giętkiego skrzydła w najdrobniejszych szczegółach zwykle wymaga zaawansowanej symulacji płynów, zbyt wolnej do badań projektowych czy kontroli na pokładzie. Aby tego uniknąć, autorzy wprowadzają sprytne przybliżenie. Dzielą deformującą się powierzchnię skrzydła na niewielką liczbę sztywnych, płaskich paneli opartych na naturalnej sieci żyłek: trzy główne panele, które nachylają się i przemiatają podczas machania. Dla każdego panelu stosują standardowe podejście „blade element”, obliczając siłę nośną i opór generowane przez wiele małych pasków wzdłuż rozpiętości, uwzględniając zarówno ruch przemiatania, jak i obrót skrzydła. Zsumowanie wkładów wszystkich paneli daje oszacowanie całkowitej siły i momentu skręcającego działającego na robot, przy znacznie mniejszych obliczeniach niż w przypadku pełnych symulacji płyn–struktura.
Z równań do sił i momentów w laboratorium
Aby przetestować swoją metodę, badacze zbudowali prototyp robota machającego skrzydłami z napędem linowym i regulowanymi nasadami skrzydeł. Używając kamer wysokiej prędkości i sześciosiowego sensora siły zmierzyli rzeczywiste kształty skrzydeł, amplitudy machania, siłę nośną i momenty sterujące w zakresie częstotliwości i skrętów nasad. Te same warunki wprowadzono następnie do dwóch modeli: tradycyjnego przybliżenia jednopłaszczyznowego oraz nowej metody wielopanelowej. Podczas gdy prosty model miał tendencję do zawyżania nośności — ponieważ stosował jeden stały kąt natarcia dla całego skrzydła — metoda wielopanelowa, z kątami natarcia zależnymi od paneli, znacznie lepiej zgadzała się z eksperymentami. W praktycznym zakresie częstotliwości machania jej przewidywania nośności mieściły się w przybliżeniu w granicach około 20 procent wartości zmierzonych, i dokładnie odzwierciedlały, jak polecenia pitch i roll nieznacznie zmniejszają nośność przy jednoczesnym wytwarzaniu momentów sterujących, które rosną niemal idealnie liniowo ze wzrostem siły polecenia.
Co to oznacza dla przyszłych malutkich latawców
Dla osób niebędących specjalistami kluczowy wniosek jest taki, że autorzy dostarczyli szybką, stosunkowo dokładną metodę przewidywania, jak giętkie skrzydła reagują, gdy skręca się ich nasady, aby sterować małym robotem latającym. Łącząc realistyczny, a jednocześnie kompaktowy opis ruchu skrzydła z modelem przepływu opartym na panelach, pokazują, że projektanci mogą oszacować nośność, opór i momenty sterujące bez kosztownych symulacji czy żmudnych prób i błędów. Daje to inżynierom praktyczne narzędzie do strojenia geometrii skrzydeł, częstotliwości machania i strategii sterowania, tak aby mikroloty podobne do owadów mogły stabilnie zawisać i reagować precyzyjnie na polecenia skrętu, przybliżając zwinne, wielkości owada roboty o krok bliżej codziennego zastosowania.
Cytowanie: Liu, Z., Zhang, X., Wang, Z. et al. Kinematic and aerodynamic modeling of flexible wings with wing root adjustment for flapping wing micro aerial vehicles. Sci Rep 16, 9827 (2026). https://doi.org/10.1038/s41598-026-40582-8
Słowa kluczowe: mikrolot o machających skrzydłach, giętkie skrzydła, sterowanie nasadą skrzydła, modelowanie aerodynamiczne, robotyka inspirowana biologią